///////////////////////////////////////////////
// The Welcome Gadget //
// (An alarm mechanism for your room ) //
// by Kutluhan Aktar //
///////////////////////////////////////////////
// With a 4x20 LCD and a 2-way Joystick, make an interactive alarm system for your room and give scary to the unknown persons who enter your room. :)
//
// When the Alarm System is activated by the optimization of joysticks, it scans the whole room for an unexpected enter.
//
// And it notifies with the buzzer and a led until the correct password is written.
//
// The servo motors are adjustable to capture a new pattern of an angle by joysticks.
//
//
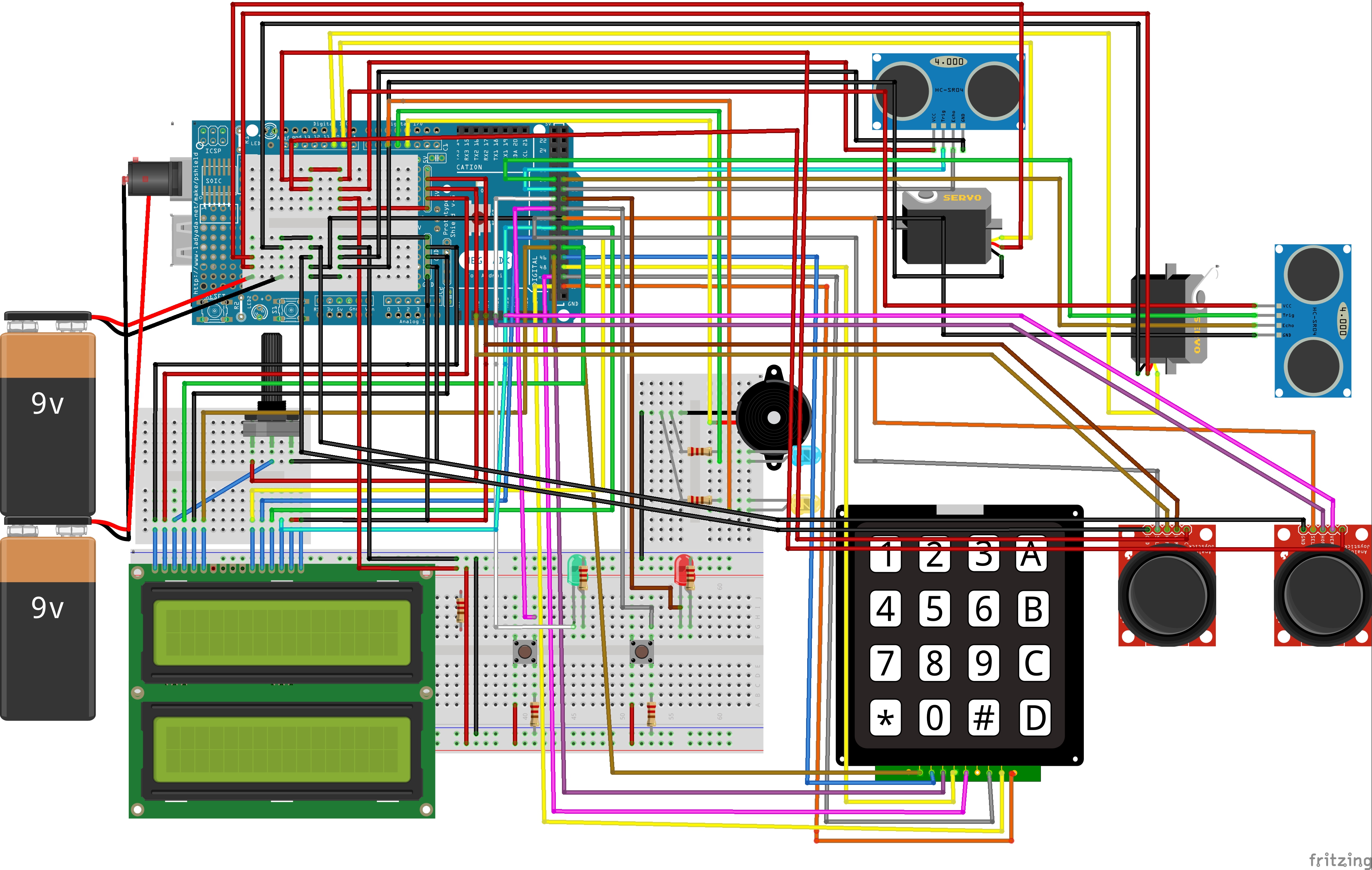
// CONNECTONS:
//
// Arduino Mega
// 4x20 LCD Screen
// Pin 45 ---------------------------------- rs
// Pin 44 ---------------------------------- en
// Pin 43 ---------------------------------- d4
// Pin 42 ---------------------------------- d5
// Pin 41 ---------------------------------- d6
// Pin 40 ---------------------------------- d7
//
// 4x4 Matrix Keypad
// Pin 50 ---------------------------------- ROW
// Pin 51 ---------------------------------- ROW
// Pin 52 ---------------------------------- ROW
// Pin 53 ---------------------------------- ROW
// Pin 46 ---------------------------------- COLS
// Pin 47 ---------------------------------- COLS
// Pin 48 ---------------------------------- COLS
// Pin 49 ---------------------------------- COLS
//
// Buzzer
// Pin 3 -----------------------------------
//
// LED
// Pin 4 -----------------------------------
// Pin 5 -----------------------------------
// Pin 34 -----------------------------------
// Pin 35 -----------------------------------
// BUTTONS
// Pin 36 -----------------------------------
// Pin 37 -----------------------------------
// Joystick (1)
// Pin A8 ----------------------------------- X
// Pin A9 ----------------------------------- Y
// Pin 38 ----------------------------------- KEY
// Joystick (2)
// Pin A10 ----------------------------------- X
// Pin A11 ----------------------------------- Y
// Pin 39 ----------------------------------- KEY
// HC-SR04 (1)
// Pin 32 ----------------------------------- Trig
// Pin 33 ----------------------------------- Echo
// HC-SR04 (2)
// Pin 30 ----------------------------------- Trig
// Pin 31 ----------------------------------- Echo
// Servo Motor (1)
// Pin 9 -----------------------------------
// Servo Motor (2)
// Pin 10 -----------------------------------
//Add the libraries.
#include <Keypad.h>
#include <LiquidCrystal.h>
#include <Servo.h>
Servo HC_SR04_1_SERVO; // Decsribe the Servo Motor as a object.
Servo HC_SR04_2_SERVO;
const int rs = 45, en = 44, d4 = 43, d5 = 42, d6 = 41, d7 = 40;// Initialize the library by associating any needed LCD interface pin
LiquidCrystal lcd(rs, en, d4, d5, d6, d7); // with the arduino pin number it is connected to.
byte initial[8] = { // Make special characters for LCD Screen.
0b11111,
0b10001,
0b10001,
0b11111,
0b10101,
0b11110,
0b11110,
0b10001,
};
byte smiley[8] = {
0b00000,
0b00000,
0b01010,
0b00000,
0b00000,
0b10001,
0b01110,
0b00000
};
byte alert[8] = {
0b10001,
0b01010,
0b00100,
0b00100,
0b00100,
0b10101,
0b01010,
0b10001,
};
const byte ROWS = 4; //Four rows
const byte COLS = 4; //Four columns
//Define the cymbols on the buttons of the keypads
char controlKeys[ROWS][COLS] = {
{'E','0','+','B'},
{'7','8','9','X'},
{'4','5','6','F'},
{'1','2','3','A'}
};
byte rowPins[ROWS] = {50,51,52,53}; //Connect to the row pinouts of the keypad.
byte colPins[COLS] = {46,47,48,49}; //Connect to the column pinouts of the keypad.
//Initialize an instance of class NewKeypad
Keypad controlKeypad = Keypad( makeKeymap(controlKeys), rowPins, colPins, ROWS, COLS);
int buzzerPin=3; //Define Buzzer pin.
int controlLed=4; //Define LED pins.
int Alert_Led=5;
int C = 262; // Define the frequancies of notes for Buzzer.
int D = 294;
int E = 330;
int F = 349;
int G = 392;
int A = 440;
int B = 494;
int C_ = 523;
int z =600;
int Z = 700;
int notes[] = {C, D, E, F, G, A, B, C_, z, Z}; // Create a group for notes.
int Joystick1_X = A8; // Describe Joysticks'pins.
int Joystick1_Y = A9;
int Joystick1_Key = 38;
int Joystick2_X = A10;
int Joystick2_Y = A11;
int Joystick2_Key = 39;
int Button1 = 36; // Define Control_Command and Scan_Command menu's buttons.
int Button2 = 37;
int led1 = 34;
int led2 = 35;
int TrigPin1=32; // Define HC-SR04 pins.
int EchoPin1=33;
int TrigPin2=30;
int EchoPin2=31;
char controlKey; // For saving the data came from Keypad.
String readString;
long duration1;
long distance1;
long duration2;
long distance2;
// Volatile booleans allow Arduino to save the data while the requirement is true.
volatile boolean Control_command = false;
volatile boolean Scan_command = false;
volatile boolean OK = false;
volatile boolean Clear = false;
volatile boolean Joystick1_XR = false;
volatile boolean Joystick1_XL = false;
volatile boolean Joystick1_YU = false;
volatile boolean Joystick1_YD = false;
volatile boolean Joystick1_KeyB = false;
volatile boolean Joystick2_XR = false;
volatile boolean Joystick2_XL = false;
volatile boolean Joystick2_YU = false;
volatile boolean Joystick2_YD = false;
volatile boolean Joystick2_KeyB = false;
volatile boolean Alert_System_1 = false;
volatile boolean Alert_System_2 = false;
volatile boolean Alert_System_Activate = false;
volatile boolean Alert_System_Alarm = false;
void setup(){
Serial.begin(9600);
HC_SR04_1_SERVO.attach(9); // Define a PWM pin for Servo Motor.
HC_SR04_2_SERVO.attach(10);
pinMode(Joystick1_Key,INPUT);
digitalWrite(Joystick1_Key,HIGH);
pinMode(Joystick2_Key,INPUT);
digitalWrite(Joystick2_Key,HIGH);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode(Button1,INPUT);
pinMode(Button2,INPUT);
pinMode(buzzerPin,OUTPUT);
pinMode(controlLed,OUTPUT);
pinMode(Alert_Led,OUTPUT);
pinMode(TrigPin1,OUTPUT);
pinMode(EchoPin1,INPUT);
pinMode(TrigPin2,OUTPUT);
pinMode(EchoPin2,INPUT);
lcd.begin(20,4);
lcd.createChar(1,initial);
lcd.createChar(2,smiley);
lcd.createChar(3,alert);
for(int i=0;i<500;i++){
lcd.setCursor(0,0);
lcd.print("Initializing...");
lcd.setCursor(10,1);
lcd.print(i);
lcd.setCursor(i/50,2);
lcd.write(1);
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("The Welcome Gadget");
lcd.setCursor(0,1);
lcd.print("is ready to run!");
lcd.setCursor(0,2);
lcd.print("Please press OK ");
lcd.setCursor(0,3);
lcd.print("to continue!");
}
void loop(){
HC_SR04(1);
// Through the volatile booleans, Arduino Mega do the determined commands while the requirements are true.
//Scan_command
if(digitalRead(Button1)==1){
Scan_command=true;
Control_command=false;
Clear=false;
lcd.clear();
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
lcd.setCursor(0,1);
lcd.print("Scan_command is");
lcd.setCursor(0,2);
lcd.print("ACTIVATED!");
lcd.setCursor(11,2);
lcd.write(2);
}
if(Scan_command==true){
if(digitalRead(Joystick2_Key)==0){
Clear=true;
OK=false;
Alert_System_1=false;
Alert_System_2=false;
Alert_System_Activate=false;
Alert_Led_Circuit(1);
}
if(digitalRead(Joystick1_Key)==0){
Clear=false;
OK=true;
Alert_System_1=false;
Alert_System_2=false;
Alert_System_Activate=false;
Alert_Led_Circuit(1);
}
if(analogRead(Joystick1_Y)>1000){
Clear=false;
OK=false;
Alert_System_1=true;
Alert_System_2=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Please turn ");
lcd.setCursor(0,1);
lcd.print("Joystick2 into up");
lcd.setCursor(0,2);
lcd.print("position to activate");
lcd.setCursor(0,3);
lcd.print("Alert_System!");
}
if(analogRead(Joystick2_Y)>1000){
Clear=false;
OK=false;
Alert_System_1=false;
Alert_System_2=true;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Please turn ");
lcd.setCursor(0,1);
lcd.print("Joystick1 into up");
lcd.setCursor(0,2);
lcd.print("position to activate");
lcd.setCursor(0,3);
lcd.print("Alert_System!");
}
if(analogRead(Joystick1_Y)>600&&analogRead(Joystick2_Y)>600){
Clear=false;
OK=false;
Alert_System_1=false;
Alert_System_2=false;
Alert_System_Activate=true;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Alert_System ");
lcd.setCursor(0,1);
lcd.print("is Activated!");
lcd.setCursor(0,2);
lcd.print("Sensor's values");
lcd.setCursor(0,3);
lcd.print("are optimum.");
}
// MANEGAMENTS
if(Clear==true){
lcd.clear();
readString="";
}
if(OK==true){
KeypadVALUES(0);
if(readString.indexOf("your birthday")>0){ // It is a little easter egg for the user.If someone write your birthday with Keypad correctly, "Happy Birthday!" blinks on the screen until "XXXX" command is run.
lcd.setCursor(0,0);
lcd.print("Happy Birthday!");
lcd.setCursor(18,0);
lcd.blink();
}
if(readString.indexOf("XXXX")>0){
lcd.noBlink();
}
}
if(Alert_System_1==true){ // Warnings for the optimization of Alert function.
for(int i=0;i<2;i++){
Alert_Led_Circuit(i);
delay(100);
}
}
if(Alert_System_2==true){
for(int i=0;i<2;i++){
Alert_Led_Circuit(i);
delay(100);
}
}
if(Alert_System_Activate==true){
digitalWrite(Alert_Led,HIGH);
Alert(); // It locks all system until Arduino gets the correct PASSWORD through the Keypad.
}
}
//Control_command
if(digitalRead(Button2)==1){ // Adjust Servo Motors and observe the value of HC-SR04 Sensors.
Scan_command=false;
Control_command=true;
lcd.clear();
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
lcd.setCursor(0,1);
lcd.print("Control_command is");
lcd.setCursor(0,2);
lcd.print("ACTIVATED!");
lcd.setCursor(11,2);
lcd.write(2);
}
if(Control_command==true){
digitalWrite(led2,HIGH);
digitalWrite(led1,LOW);
if(analogRead(Joystick1_X)<50){
Joystick1_XR=true;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick1_X is Right");
lcd.setCursor(0,2);
lcd.print("HC_SR04_1_SERVO=90");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick1_X)>800){
Joystick1_XR=false;
Joystick1_XL=true;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick1_X is Left");
lcd.setCursor(0,2);
lcd.print("HC_SR04_1_SERVO=0");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick1_Y)>1000){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=true;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick1_Y is Up");
lcd.setCursor(0,2);
lcd.print("HC-SR04_1 = ");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick1_Y)<150){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=true;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick1_Y is Down");
lcd.setCursor(0,2);
lcd.print("HC_SR04_1_SERVO=180");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(digitalRead(Joystick1_Key)==0){ // Test the Buzzer works correctly.
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=true;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick1_X is Clicked ");
lcd.setCursor(0,2);
lcd.print("BUZZER");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick2_X)<50){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=true;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick2_X is Right");
lcd.setCursor(0,2);
lcd.print("HC_SR04_2_SERVO=90");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick2_X)>800){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=true;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick2_X is Left");
lcd.setCursor(0,2);
lcd.print("HC_SR04_2_SERVO=0");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick2_Y)>1000){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=true;
Joystick2_YD=false;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick2_Y is Up");
lcd.setCursor(0,2);
lcd.print("HC-SR04_2 = ");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(analogRead(Joystick2_Y)<150){
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=true;
Joystick2_KeyB=false;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick2_Y is Down");
lcd.setCursor(0,2);
lcd.print("HC_SR04_2_SERVO=180");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
if(digitalRead(Joystick2_Key)==0){ // Test the controlLed works correctly.
Joystick1_XR=false;
Joystick1_XL=false;
Joystick1_YU=false;
Joystick1_YD=false;
Joystick1_KeyB=false;
Joystick2_XR=false;
Joystick2_XL=false;
Joystick2_YU=false;
Joystick2_YD=false;
Joystick2_KeyB=true;
;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Joystick2_X is Clicked");
lcd.setCursor(0,2);
lcd.print("LED");
for(int i=0;i<20;i++){
lcd.setCursor(i,3);
lcd.write(3);
}
}
//MANAGEMENTS
if(Joystick1_KeyB==true){
tone(buzzerPin,300);
}
if(Joystick1_KeyB==false){
noTone(buzzerPin);
}
if(Joystick2_KeyB==true){
digitalWrite(controlLed,HIGH);
}
if(Joystick2_KeyB==false){
digitalWrite(controlLed,LOW);
}
if(Joystick1_YU==true){
HC_SR04(2);
}
if(Joystick2_YU==true){
HC_SR04(3);
}
if(Joystick1_XR==true){
HC_SR04_1_SERVO.write(90);
}
if(Joystick1_XL==true){
HC_SR04_1_SERVO.write(0);
}
if(Joystick1_YD==true){
HC_SR04_1_SERVO.write(180);
}
if(Joystick2_XR==true){
HC_SR04_2_SERVO.write(90);
}
if(Joystick2_XL==true){
HC_SR04_2_SERVO.write(0);
}
if(Joystick2_YD==true){
HC_SR04_2_SERVO.write(180);
}
}
}
void KeypadVoices(char i){ // Define what voices sounds when the buttons of Keypad are pushed.
switch(i){
case '1':
tone(buzzerPin,notes[1]);
break;
case '2':
tone(buzzerPin,notes[2]);
break;
case '3':
tone(buzzerPin,notes[3]);
break;
case '4':
tone(buzzerPin,notes[4]);
break;
case '5':
tone(buzzerPin,notes[5]);
break;
case '6':
tone(buzzerPin,notes[6]);
break;
case '7':
tone(buzzerPin,notes[7]);
break;
case '8':
tone(buzzerPin,notes[8]);
break;
case '9':
tone(buzzerPin,notes[9]);
break;
case '0':
tone(buzzerPin,notes[10]);
break;
default:
noTone(buzzerPin);
break;
}
}
void HC_SR04(int i){ // Get the information of distance from HC-SR04 Sensors.
switch(i){
case 1:
digitalWrite(TrigPin1,LOW);
delay(2);
digitalWrite(TrigPin1,HIGH);
delay(10);
digitalWrite(TrigPin1,LOW);
duration1=pulseIn(EchoPin1,HIGH);
distance1=duration1/58.2;
digitalWrite(TrigPin2,LOW);
delay(2);
digitalWrite(TrigPin2,HIGH);
delay(10);
digitalWrite(TrigPin2,LOW);
duration2=pulseIn(EchoPin2,HIGH);
distance2=duration2/58.2;
break;
case 2:
lcd.setCursor(15,2);
lcd.print(distance1);
break;
case 3:
lcd.setCursor(15,2);
lcd.print(distance2);
break;
default:
break;
}
}
void KeypadVALUES(int x){ // Write the Keypad values to 4x20 LCD.
controlKey= controlKeypad.getKey();
lcd.setCursor(0,x);
lcd.print("Keypad Values :");
if(controlKey){
readString+=controlKey;
KeypadVoices(controlKey);
lcd.setCursor(0,x+1);
lcd.print(readString);
}
}
void Alert_Led_Circuit(int i){ // Alert led.
switch(i){
case 0:
digitalWrite(Alert_Led,HIGH);
break;
case 1:
digitalWrite(Alert_Led,LOW);
break;
default:
break;
}
}
void Alert(){ // If someone enters your room, Arduino Mega notifies you with the Buzzer and the controlLed until who write the correct PASSWORD with Keypad.
// And it is getting weirder for somebody who enters your room without your permission even though they know about the Welcome Gadget. :)
if(distance1<50 || distance2<50){
Alert_System_Alarm=true;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Please Write");
lcd.setCursor(0,1);
lcd.print("PASSWORD :");
}
if(Alert_System_Alarm==true){
while(Alert_System_Alarm==true){
Clear=false;
OK=false;
Alert_System_1=false;
Alert_System_2=false;
digitalWrite(controlLed,HIGH);
tone(buzzerPin,100);
KeypadVALUES(2);
if(readString.indexOf("1234")>0 && controlKey=='E'){
lcd.clear();
lcd.setCursor(5,1);
lcd.print("CORRECT");
digitalWrite(controlLed,LOW);
noTone(buzzerPin);
Alert_System_Alarm=false;
}
}
}
}


_OGsBeqaNUm.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments