



Hardware components | ||||||
 |
| × | 2 | |||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 22 | |||
 |
| × | 2 | |||
Ever get tired of your roommates always messing with the thermostat? Or you're to lazy to get up and change the temperature in your apartment? We have a simple solution and it's called KT mobile thermostat. With this project you can turn your A/C or heat on and off with just the click of a button. It can also monitor the average temperature throughout the house with two particle photons. With this product you could save money on your electricity bills and make yourself more comfortable in your own apartment or house.
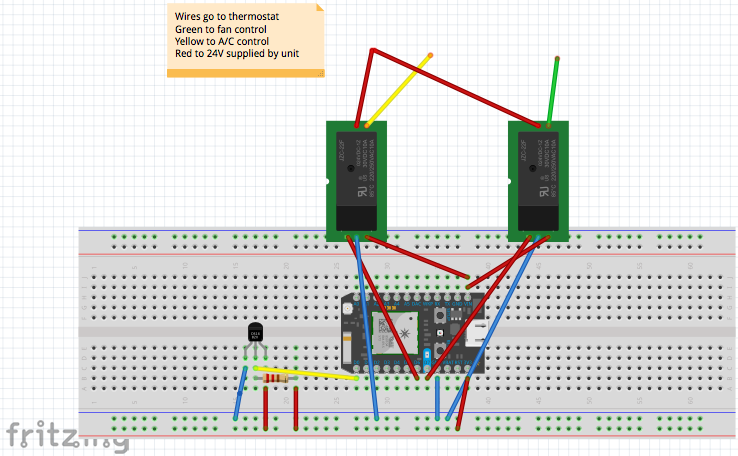
The KT thermostat is very user friendly when it comes to the wiring. The first step will be to take off the faceplate to the thermostat. Find a wiring diagram for your specific thermostat that shows you a 24v, fan, A/C, and heat source. The goal of the wiring is to short each component to the 24v source so they can be turned on. An easy way to see what each component is without a diagram is to switch on the A/C, heat or fan setting on the faceplate and test the continuity on each pin. This will make sure you pick the right pin. To make sure each of these devices are not constantly running you will need to run each wire through a relay. The 24v source wire will be connected to the coil of the relay(usually the center post), the fan, A/C, or heat wire will be connected to the NO post of the relay. On the other side of the relay there will be three pins; Vcc, Vin, ground. The Vcc requires 5v, which can be taken from the Vin pin from the particle. The Vin pin on the relay requires 3.3v which can come from any digital pin on the board, and finally the ground pin can be connected to any ground location on the breadboard. Repeat these steps for anything else you want to control such as heat.
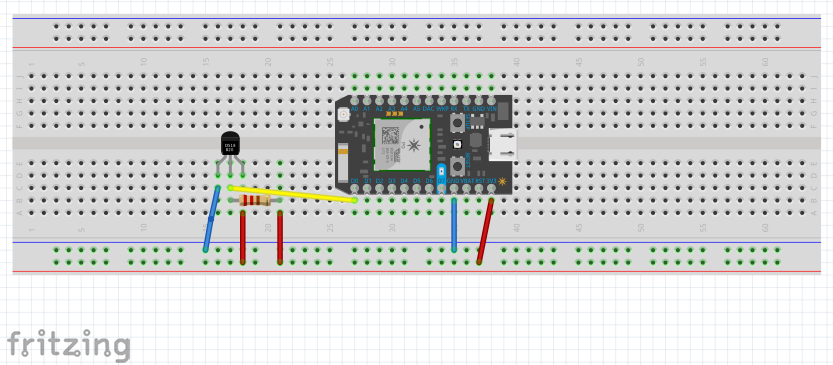
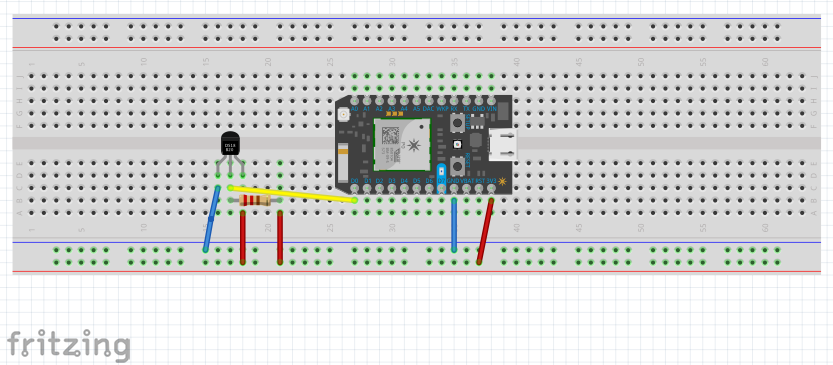
Each photon has a one wire temperature sensor connected to it. The one bread board will just have this sensor which can be placed anywhere, while the other has this sensor as well as the wiring mentioned above. The great thing about the KT thermostat is that there can be temperature sensors all over the house that are sending temperatures to the main photon controlling the thermostat. The KT thermostat offers a cheap solution to an expensive thermostat such as a Nest.
The following are graphs showing the voltage to the A/C wire versus time (top graph) and the average temperature versus time (bottom graph) right after the A/C and the fan are turned on .
Bedroom Thermostat Code
C/C++// This #include statement was automatically added by the Particle IDE.
#include "spark-dallas-temperature.h"
// This #include statement was automatically added by the Particle IDE.
#include "OneWire.h"
// This #include statement was automatically added by the Spark IDE.
#include "OneWire.h"
// This #include statement was automatically added by the Spark IDE.
#include "spark-dallas-temperature.h"
// -----------------
// Read temperature
// -----------------
// Data wire is plugged into port 0 on the Arduino
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(D0 );
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature dallas(&oneWire);
// Create a variable that will store the temperature value
double temperature = 0.0;
double temperatureF = 0.0;
void setup()
{
// Register a Particle Core variable here
Particle.variable("temperature", &temperature, DOUBLE);
Particle.variable("temperatureF", &temperatureF, DOUBLE);
// setup the library
dallas.begin();
Serial.begin(9600);
}
void loop()
{
// Request temperature conversion (traditional)
dallas.requestTemperatures();
// get the temperature in Celcius
float tempC = dallas.getTempCByIndex(0);
// convert to double
temperature = (double)tempC;
// convert to Fahrenheit
float tempF = DallasTemperature::toFahrenheit( tempC );
// convert to double
temperatureF = (double)tempF;
Particle.publish("temperatureF",String( tempF ));/*event published for 'thingspeak' to graph data*/
// Print out
Serial.print( "Temp in C = ");
Serial.print( tempC );
Serial.print( "\t\t F = ");
Serial.println( tempF );
delay(5000);
}
Living Room/Common Area Thermostat Code
C/C++// This #include statement was automatically added by the Particle IDE.
#include "spark-dallas-temperature.h"
// This #include statement was automatically added by the Particle IDE.
#include "OneWire.h"
// This #include statement was automatically added by the Spark IDE.
#include "OneWire.h"
// This #include statement was automatically added by the Spark IDE.
#include "spark-dallas-temperature.h"
// -----------------
// Read temperature
// -----------------
// Data wire is plugged into port 0 on the Arduino
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(D0 );
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature dallas(&oneWire);
// Create a variable that will store the temperature value
double temperature = 0.0;
double temperatureF = 0.0;
double averagetemp = 0.0;
double othertemp=0.0;
void setup()
{
// Register a Particle Core variable here
Particle.variable("temperature", &temperature, DOUBLE);
Particle.variable("temperatureF", &temperatureF, DOUBLE);
Particle.variable("averagetemp", &averagetemp, DOUBLE); //used for logging for ifttt
Particle.subscribe("temperatureF", myHandler, "21003b001047353138383138");
// setup the library
dallas.begin();
Serial.begin(9600);
}
void myHandler(const char *event, const char *data)
{
othertemp= atof(data);
// Request temperature conversion (traditional)
dallas.requestTemperatures();
// get the temperature in Celcius
float tempC = dallas.getTempCByIndex(0);
// convert to double
temperature = (double)tempC;
// convert to Fahrenheit
float tempF = DallasTemperature::toFahrenheit( tempC );
// convert to double
temperatureF = (double)tempF;
Particle.publish("temperatureF2", String ( tempF ));
averagetemp= (othertemp + tempF)/2;
Particle.publish("AverageTemp", String ( averagetemp ));
// Print out
Serial.print( "Temp in C = ");
Serial.print( tempC );
Serial.print( "\t\t F = ");
Serial.println( tempF );
delay(10000);
{
}
}
/*
Particle Verison of OneWire Libary
Hotaman 2/1/2016
Bit and Byte write functions have been changed to only drive the bus high at the end of a byte when requested.
They no longer drive the bus for High bits when outputting to avoid a holy war.
Some folks just can't accept that a 10K resistor works just fine when the calculation calls for 10,042.769 ohms.
Bit and Byte writes are now 100% compliant with specs and app notes.
Support for P1 and Electron added by Hotaman 11/30/2015
Support for Photon added by Brendan Albano and cdrodriguez
- Brendan Albano 2015-06-10
I made monor tweeks to allow use in the web builder and created this repository for
use in the contributed libs list.
6/2014 - Hotaman
I've taken the code that Spark Forum user tidwelltimj posted
split it back into separte code and header files and put back in the
credits and comments and got it compiling on the command line within SparkCore core-firmware
Justin Maynard 2013
Original Comments follow
Copyright (c) 2007, Jim Studt (original old version - many contributors since)
The latest version of this library may be found at:
http://www.pjrc.com/teensy/td_libs_OneWire.html
OneWire has been maintained by Paul Stoffregen (paul@pjrc.com) since
January 2010. At the time, it was in need of many bug fixes, but had
been abandoned the original author (Jim Studt). None of the known
contributors were interested in maintaining OneWire. Paul typically
works on OneWire every 6 to 12 months. Patches usually wait that
long. If anyone is interested in more actively maintaining OneWire,
please contact Paul.
Version 2.2:
Teensy 3.0 compatibility, Paul Stoffregen, paul@pjrc.com
Arduino Due compatibility, http://arduino.cc/forum/index.php?topic=141030
Fix DS18B20 example negative temperature
Fix DS18B20 example's low res modes, Ken Butcher
Improve reset timing, Mark Tillotson
Add const qualifiers, Bertrik Sikken
Add initial value input to crc16, Bertrik Sikken
Add target_search() function, Scott Roberts
Version 2.1:
Arduino 1.0 compatibility, Paul Stoffregen
Improve temperature example, Paul Stoffregen
DS250x_PROM example, Guillermo Lovato
PIC32 (chipKit) compatibility, Jason Dangel, dangel.jason AT gmail.com
Improvements from Glenn Trewitt:
- crc16() now works
- check_crc16() does all of calculation/checking work.
- Added read_bytes() and write_bytes(), to reduce tedious loops.
- Added ds2408 example.
Delete very old, out-of-date readme file (info is here)
Version 2.0: Modifications by Paul Stoffregen, January 2010:
http://www.pjrc.com/teensy/td_libs_OneWire.html
Search fix from Robin James
http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1238032295/27#27
Use direct optimized I/O in all cases
Disable interrupts during timing critical sections
(this solves many random communication errors)
Disable interrupts during read-modify-write I/O
Reduce RAM consumption by eliminating unnecessary
variables and trimming many to 8 bits
Optimize both crc8 - table version moved to flash
Modified to work with larger numbers of devices - avoids loop.
Tested in Arduino 11 alpha with 12 sensors.
26 Sept 2008 -- Robin James
http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1238032295/27#27
Updated to work with arduino-0008 and to include skip() as of
2007/07/06. --RJL20
Modified to calculate the 8-bit CRC directly, avoiding the need for
the 256-byte lookup table to be loaded in RAM. Tested in arduino-0010
-- Tom Pollard, Jan 23, 2008
Jim Studt's original library was modified by Josh Larios.
Tom Pollard, pollard@alum.mit.edu, contributed around May 20, 2008
Permission is hereby granted, free of charge, to any person obtaining
a copy of this software and associated documentation files (the
"Software"), to deal in the Software without restriction, including
without limitation the rights to use, copy, modify, merge, publish,
distribute, sublicense, and/or sell copies of the Software, and to
permit persons to whom the Software is furnished to do so, subject to
the following conditions:
The above copyright notice and this permission notice shall be
included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE
LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION
OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION
WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Much of the code was inspired by Derek Yerger's code, though I don't
think much of that remains. In any event that was..
(copyleft) 2006 by Derek Yerger - Free to distribute freely.
The CRC code was excerpted and inspired by the Dallas Semiconductor
sample code bearing this copyright.
//---------------------------------------------------------------------------
// Copyright (C) 2000 Dallas Semiconductor Corporation, All Rights Reserved.
//
// Permission is hereby granted, free of charge, to any person obtaining a
// copy of this software and associated documentation files (the "Software"),
// to deal in the Software without restriction, including without limitation
// the rights to use, copy, modify, merge, publish, distribute, sublicense,
// and/or sell copies of the Software, and to permit persons to whom the
// Software is furnished to do so, subject to the following conditions:
//
// The above copyright notice and this permission notice shall be included
// in all copies or substantial portions of the Software.
//
// THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS
// OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
// MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
// IN NO EVENT SHALL DALLAS SEMICONDUCTOR BE LIABLE FOR ANY CLAIM, DAMAGES
// OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE,
// ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
// OTHER DEALINGS IN THE SOFTWARE.
//
// Except as contained in this notice, the name of Dallas Semiconductor
// shall not be used except as stated in the Dallas Semiconductor
// Branding Policy.
//--------------------------------------------------------------------------
*/
#include "OneWire.h"
#include "application.h"
OneWire::OneWire(uint16_t pin)
{
pinMode(pin, INPUT);
_pin = pin;
}
// Perform the onewire reset function. We will wait up to 250uS for
// the bus to come high, if it doesn't then it is broken or shorted
// and we return a 0;
//
// Returns 1 if a device asserted a presence pulse, 0 otherwise.
//
uint8_t OneWire::reset(void)
{
uint8_t r;
uint8_t retries = 125;
noInterrupts();
pinModeFastInput();
interrupts();
// wait until the wire is high... just in case
do {
if (--retries == 0) return 0;
delayMicroseconds(2);
} while ( !digitalReadFast());
noInterrupts();
digitalWriteFastLow();
pinModeFastOutput(); // drive output low
interrupts();
delayMicroseconds(480);
noInterrupts();
pinModeFastInput(); // allow it to float
delayMicroseconds(70);
r =! digitalReadFast();
interrupts();
delayMicroseconds(410);
return r;
}
void OneWire::write_bit(uint8_t v)
{
if (v & 1) {
noInterrupts();
digitalWriteFastLow();
pinModeFastOutput(); // drive output low
delayMicroseconds(10);
pinModeFastInput(); // float high
interrupts();
delayMicroseconds(55);
} else {
noInterrupts();
digitalWriteFastLow();
pinModeFastOutput(); // drive output low
delayMicroseconds(65);
pinModeFastInput(); // float high
interrupts();
delayMicroseconds(5);
}
}
//
// Read a bit. Port and bit is used to cut lookup time and provide
// more certain timing.
//
uint8_t OneWire::read_bit(void)
{
uint8_t r;
noInterrupts();
digitalWriteFastLow();
pinModeFastOutput();
delayMicroseconds(3);
pinModeFastInput(); // let pin float, pull up will raise
delayMicroseconds(10);
r = digitalReadFast();
interrupts();
delayMicroseconds(53);
return r;
}
//
// Write a byte. The writing code uses the active drivers to raise the
// pin high, if you need power after the write (e.g. DS18S20 in
// parasite power mode) then set 'power' to 1, otherwise the pin will
// go tri-state at the end of the write to avoid heating in a short or
// other mishap.
//
void OneWire::write(uint8_t v, uint8_t power /* = 0 */)
{
uint8_t bitMask;
for (bitMask = 0x01; bitMask; bitMask <<= 1) {
OneWire::write_bit( (bitMask & v)?1:0);
}
if ( power) {
noInterrupts();
digitalWriteFastHigh();
pinModeFastOutput(); // Drive pin High when power is True
interrupts();
}
}
void OneWire::write_bytes(const uint8_t *buf, uint16_t count, bool power /* = 0 */)
{
for (uint16_t i = 0 ; i < count ; i++)
write(buf[i]);
if (power) {
noInterrupts();
digitalWriteFastHigh();
pinModeFastOutput(); // Drive pin High when power is True
interrupts();
}
}
//
// Read a byte
//
uint8_t OneWire::read()
{
uint8_t bitMask;
uint8_t r = 0;
for (bitMask = 0x01; bitMask; bitMask <<= 1) {
if ( OneWire::read_bit()) r |= bitMask;
}
return r;
}
void OneWire::read_bytes(uint8_t *buf, uint16_t count)
{
for (uint16_t i = 0 ; i < count ; i++)
buf[i] = read();
}
//
// Do a ROM select
//
void OneWire::select(const uint8_t rom[8])
{
uint8_t i;
write(0x55); // Choose ROM
for (i = 0; i < 8; i++) write(rom[i]);
}
//
// Do a ROM skip
//
void OneWire::skip()
{
write(0xCC); // Skip ROM
}
void OneWire::depower()
{
noInterrupts();
pinModeFastInput();
interrupts();
}
#if ONEWIRE_SEARCH
//
// You need to use this function to start a search again from the beginning.
// You do not need to do it for the first search, though you could.
//
void OneWire::reset_search()
{
// reset the search state
LastDiscrepancy = 0;
LastDeviceFlag = FALSE;
LastFamilyDiscrepancy = 0;
for(int i = 7; ; i--) {
ROM_NO[i] = 0;
if ( i == 0) break;
}
}
// Setup the search to find the device type 'family_code' on the next call
// to search(*newAddr) if it is present.
//
void OneWire::target_search(uint8_t family_code)
{
// set the search state to find SearchFamily type devices
ROM_NO[0] = family_code;
for (uint8_t i = 1; i < 8; i++)
ROM_NO[i] = 0;
LastDiscrepancy = 64;
LastFamilyDiscrepancy = 0;
LastDeviceFlag = FALSE;
}
//
// Perform a search. If this function returns a '1' then it has
// enumerated the next device and you may retrieve the ROM from the
// OneWire::address variable. If there are no devices, no further
// devices, or something horrible happens in the middle of the
// enumeration then a 0 is returned. If a new device is found then
// its address is copied to newAddr. Use OneWire::reset_search() to
// start over.
//
// --- Replaced by the one from the Dallas Semiconductor web site ---
//--------------------------------------------------------------------------
// Perform the 1-Wire Search Algorithm on the 1-Wire bus using the existing
// search state.
// Return TRUE : device found, ROM number in ROM_NO buffer
// FALSE : device not found, end of search
//
uint8_t OneWire::search(uint8_t *newAddr)
{
uint8_t id_bit_number;
uint8_t last_zero, rom_byte_number, search_result;
uint8_t id_bit, cmp_id_bit;
unsigned char rom_byte_mask, search_direction;
// initialize for search
id_bit_number = 1;
last_zero = 0;
rom_byte_number = 0;
rom_byte_mask = 1;
search_result = 0;
// if the last call was not the last one
if (!LastDeviceFlag)
{
// 1-Wire reset
if (!reset()){
// reset the search
LastDiscrepancy = 0;
LastDeviceFlag = FALSE;
LastFamilyDiscrepancy = 0;
return FALSE;
}
// issue the search command
write(0xF0);
// loop to do the search
do
{
// read a bit and its complement
id_bit = read_bit();
cmp_id_bit = read_bit();
// check for no devices on 1-wire
if ((id_bit == 1) && (cmp_id_bit == 1)){
break;
}
else
{
// all devices coupled have 0 or 1
if (id_bit != cmp_id_bit){
search_direction = id_bit; // bit write value for search
}
else{
// if this discrepancy if before the Last Discrepancy
// on a previous next then pick the same as last time
if (id_bit_number < LastDiscrepancy)
search_direction = ((ROM_NO[rom_byte_number] & rom_byte_mask) > 0);
else
// if equal to last pick 1, if not then pick 0
search_direction = (id_bit_number == LastDiscrepancy);
// if 0 was picked then record its position in LastZero
if (search_direction == 0){
last_zero = id_bit_number;
// check for Last discrepancy in family
if (last_zero < 9)
LastFamilyDiscrepancy = last_zero;
}
}
// set or clear the bit in the ROM byte rom_byte_number
// with mask rom_byte_mask
if (search_direction == 1)
ROM_NO[rom_byte_number] |= rom_byte_mask;
else
ROM_NO[rom_byte_number] &= ~rom_byte_mask;
// serial number search direction write bit
write_bit(search_direction);
// increment the byte counter id_bit_number
// and shift the mask rom_byte_mask
id_bit_number++;
rom_byte_mask <<= 1;
// if the mask is 0 then go to new SerialNum byte rom_byte_number and reset mask
if (rom_byte_mask == 0)
{
rom_byte_number++;
rom_byte_mask = 1;
}
}
}while(rom_byte_number < 8); // loop until through all ROM bytes 0-7
// if the search was successful then
if (!(id_bit_number < 65))
{
// search successful so set LastDiscrepancy,LastDeviceFlag,search_result
LastDiscrepancy = last_zero;
// check for last device
if (LastDiscrepancy == 0)
LastDeviceFlag = TRUE;
search_result = TRUE;
}
}
// if no device found then reset counters so next 'search' will be like a first
if (!search_result || !ROM_NO[0]){
LastDiscrepancy = 0;
LastDeviceFlag = FALSE;
LastFamilyDiscrepancy = 0;
search_result = FALSE;
}
for (int i = 0; i < 8; i++) newAddr[i] = ROM_NO[i];
return search_result;
}
#endif
#if ONEWIRE_CRC
// The 1-Wire CRC scheme is described in Maxim Application Note 27:
// "Understanding and Using Cyclic Redundancy Checks with Maxim iButton Products"
//
//
// Compute a Dallas Semiconductor 8 bit CRC directly.
// this is much slower, but much smaller, than the lookup table.
//
uint8_t OneWire::crc8( uint8_t *addr, uint8_t len)
{
uint8_t crc = 0;
while (len--) {
uint8_t inbyte = *addr++;
for (uint8_t i = 8; i; i--) {
uint8_t mix = (crc ^ inbyte) & 0x01;
crc >>= 1;
if (mix) crc ^= 0x8C;
inbyte >>= 1;
}
}
return crc;
}
#endif
#if ONEWIRE_CRC16
bool OneWire::check_crc16(const uint8_t* input, uint16_t len, const uint8_t* inverted_crc, uint16_t crc)
{
crc = ~crc16(input, len, crc);
return (crc & 0xFF) == inverted_crc[0] && (crc >> 8) == inverted_crc[1];
}
uint16_t OneWire::crc16(const uint8_t* input, uint16_t len, uint16_t crc)
{
static const uint8_t oddparity[16] =
{ 0, 1, 1, 0, 1, 0, 0, 1, 1, 0, 0, 1, 0, 1, 1, 0 };
for (uint16_t i = 0 ; i < len ; i++) {
// Even though we're just copying a byte from the input,
// we'll be doing 16-bit computation with it.
uint16_t cdata = input[i];
cdata = (cdata ^ crc) & 0xff;
crc >>= 8;
if (oddparity[cdata & 0x0F] ^ oddparity[cdata >> 4])
crc ^= 0xC001;
cdata <<= 6;
crc ^= cdata;
cdata <<= 1;
crc ^= cdata;
}
return crc;
}
#endif
#ifndef OneWire_h
#define OneWire_h
#include <inttypes.h>
#include "application.h"
// you can exclude onewire_search by defining that to 0
#ifndef ONEWIRE_SEARCH
#define ONEWIRE_SEARCH 1
#endif
// You can exclude CRC checks altogether by defining this to 0
#ifndef ONEWIRE_CRC
#define ONEWIRE_CRC 1
#endif
// You can allow 16-bit CRC checks by defining this to 1
// (Note that ONEWIRE_CRC must also be 1.)
#ifndef ONEWIRE_CRC16
#define ONEWIRE_CRC16 1
#endif
// TRUE and FALSE are defined by default on the Spark
// #define FALSE 0
// #define TRUE 1
class OneWire
{
private:
uint16_t _pin;
/**************Conditional fast pin access for Core and Photon*****************/
#if PLATFORM_ID == 0 // Core
inline void digitalWriteFastLow() {
PIN_MAP[_pin].gpio_peripheral->BRR = PIN_MAP[_pin].gpio_pin;
}
inline void digitalWriteFastHigh() {
PIN_MAP[_pin].gpio_peripheral->BSRR = PIN_MAP[_pin].gpio_pin;
}
inline void pinModeFastOutput() {
GPIO_TypeDef *gpio_port = PIN_MAP[_pin].gpio_peripheral;
uint16_t gpio_pin = PIN_MAP[_pin].gpio_pin;
GPIO_InitTypeDef GPIO_InitStructure;
if (gpio_port == GPIOA )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
}
else if (gpio_port == GPIOB )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
}
GPIO_InitStructure.GPIO_Pin = gpio_pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
PIN_MAP[_pin].pin_mode = OUTPUT;
GPIO_Init(gpio_port, &GPIO_InitStructure);
}
inline void pinModeFastInput() {
GPIO_TypeDef *gpio_port = PIN_MAP[_pin].gpio_peripheral;
uint16_t gpio_pin = PIN_MAP[_pin].gpio_pin;
GPIO_InitTypeDef GPIO_InitStructure;
if (gpio_port == GPIOA )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
}
else if (gpio_port == GPIOB )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
}
GPIO_InitStructure.GPIO_Pin = gpio_pin;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
PIN_MAP[_pin].pin_mode = INPUT;
GPIO_Init(gpio_port, &GPIO_InitStructure);
}
inline uint8_t digitalReadFast() {
return GPIO_ReadInputDataBit(PIN_MAP[_pin].gpio_peripheral, PIN_MAP[_pin].gpio_pin);
}
//#elif PLATFORM_ID == 6 || PLATFORM_ID == 8 || PLATFORM_ID == 10 // Photon(P0),P1,Electron
#else // just do this for everything else until they change it again
STM32_Pin_Info* PIN_MAP = HAL_Pin_Map(); // Pointer required for highest access speed
inline void digitalWriteFastLow() {
PIN_MAP[_pin].gpio_peripheral->BSRRH = PIN_MAP[_pin].gpio_pin;
}
inline void digitalWriteFastHigh() {
PIN_MAP[_pin].gpio_peripheral->BSRRL = PIN_MAP[_pin].gpio_pin;
}
inline void pinModeFastOutput(void){
// This could probably be speed up by digging a little deeper past
// the HAL_Pin_Mode function.
HAL_Pin_Mode(_pin, OUTPUT);
}
inline void pinModeFastInput(void){
// This could probably be speed up by digging a little deeper past
// the HAL_Pin_Mode function.
HAL_Pin_Mode(_pin, INPUT);
}
inline uint8_t digitalReadFast(void){
// This could probably be speed up by digging a little deeper past
// the HAL_GPIO_Read function.
return HAL_GPIO_Read(_pin);
}
//#else // no need for this right now
//#error "*** PLATFORM_ID not supported by this library. PLATFORM should be Core, Photon, P1 or Electron ***"
#endif
/**************End conditional fast pin access for Core and Photon*************/
#if ONEWIRE_SEARCH
// global search state
unsigned char ROM_NO[8];
uint8_t LastDiscrepancy;
uint8_t LastFamilyDiscrepancy;
uint8_t LastDeviceFlag;
#endif
public:
OneWire( uint16_t pin);
// Perform a 1-Wire reset cycle. Returns 1 if a device responds
// with a presence pulse. Returns 0 if there is no device or the
// bus is shorted or otherwise held low for more than 250uS
uint8_t reset(void);
// Issue a 1-Wire rom select command, you do the reset first.
void select(const uint8_t rom[8]);
// Issue a 1-Wire rom skip command, to address all on bus.
void skip(void);
// Write a byte. If 'power' is one then the wire is held high at
// the end for parasitically powered devices. You are responsible
// for eventually depowering it by calling depower() or doing
// another read or write.
void write(uint8_t v, uint8_t power = 0);
void write_bytes(const uint8_t *buf, uint16_t count, bool power = 0);
// Read a byte.
uint8_t read(void);
void read_bytes(uint8_t *buf, uint16_t count);
// Write a bit. The bus is always left powered at the end, see
// note in write() about that.
void write_bit(uint8_t v);
// Read a bit.
uint8_t read_bit(void);
// Stop forcing power onto the bus. You only need to do this if
// you used the 'power' flag to write() or used a write_bit() call
// and aren't about to do another read or write. You would rather
// not leave this powered if you don't have to, just in case
// someone shorts your bus.
void depower(void);
#if ONEWIRE_SEARCH
// Clear the search state so that if will start from the beginning again.
void reset_search();
// Setup the search to find the device type 'family_code' on the next call
// to search(*newAddr) if it is present.
void target_search(uint8_t family_code);
// Look for the next device. Returns 1 if a new address has been
// returned. A zero might mean that the bus is shorted, there are
// no devices, or you have already retrieved all of them. It
// might be a good idea to check the CRC to make sure you didn't
// get garbage. The order is deterministic. You will always get
// the same devices in the same order.
uint8_t search(uint8_t *newAddr);
#endif
#if ONEWIRE_CRC
// Compute a Dallas Semiconductor 8 bit CRC, these are used in the
// ROM and scratchpad registers.
static uint8_t crc8(uint8_t *addr, uint8_t len);
#if ONEWIRE_CRC16
// Compute the 1-Wire CRC16 and compare it against the received CRC.
// Example usage (reading a DS2408):
// // Put everything in a buffer so we can compute the CRC easily.
// uint8_t buf[13];
// buf[0] = 0xF0; // Read PIO Registers
// buf[1] = 0x88; // LSB address
// buf[2] = 0x00; // MSB address
// WriteBytes(net, buf, 3); // Write 3 cmd bytes
// ReadBytes(net, buf+3, 10); // Read 6 data bytes, 2 0xFF, 2 CRC16
// if (!CheckCRC16(buf, 11, &buf[11])) {
// // Handle error.
// }
//
// @param input - Array of bytes to checksum.
// @param len - How many bytes to use.
// @param inverted_crc - The two CRC16 bytes in the received data.
// This should just point into the received data,
// *not* at a 16-bit integer.
// @param crc - The crc starting value (optional)
// @return True, iff the CRC matches.
static bool check_crc16(const uint8_t* input, uint16_t len, const uint8_t* inverted_crc, uint16_t crc = 0);
// Compute a Dallas Semiconductor 16 bit CRC. This is required to check
// the integrity of data received from many 1-Wire devices. Note that the
// CRC computed here is *not* what you'll get from the 1-Wire network,
// for two reasons:
// 1) The CRC is transmitted bitwise inverted.
// 2) Depending on the endian-ness of your processor, the binary
// representation of the two-byte return value may have a different
// byte order than the two bytes you get from 1-Wire.
// @param input - Array of bytes to checksum.
// @param len - How many bytes to use.
// @param crc - The crc starting value (optional)
// @return The CRC16, as defined by Dallas Semiconductor.
static uint16_t crc16(const uint8_t* input, uint16_t len, uint16_t crc = 0);
#endif
#endif
};
#endif
// This library is free software; you can redistribute it and/or
// modify it under the terms of the GNU Lesser General Public
// License as published by the Free Software Foundation; either
// version 2.1 of the License, or (at your option) any later version.
// Version 3.7.2 modified on Dec 6, 2011 to support Arduino 1.0
// See Includes...
// Modified by Jordan Hochenbaum
// Modified by Tom de Boer @ 26-jun-2014 (Spark Core compatibility)
#include "spark-dallas-temperature.h"
DallasTemperature::DallasTemperature(OneWire* _oneWire)
#if REQUIRESALARMS
: _AlarmHandler(&defaultAlarmHandler)
#endif
{
_wire = _oneWire;
devices = 0;
parasite = false;
bitResolution = 9;
waitForConversion = true;
checkForConversion = true;
}
// initialise the bus
void DallasTemperature::begin(void)
{
DeviceAddress deviceAddress;
_wire->reset_search();
devices = 0; // Reset the number of devices when we enumerate wire devices
while (_wire->search(deviceAddress))
{
if (validAddress(deviceAddress))
{
if (!parasite && readPowerSupply(deviceAddress)) parasite = true;
ScratchPad scratchPad;
readScratchPad(deviceAddress, scratchPad);
bitResolution = max(bitResolution, getResolution(deviceAddress));
devices++;
}
}
}
// returns the number of devices found on the bus
uint8_t DallasTemperature::getDeviceCount(void)
{
return devices;
}
// returns true if address is valid
bool DallasTemperature::validAddress(const uint8_t* deviceAddress)
{
return (_wire->crc8((uint8_t*)deviceAddress, 7) == deviceAddress[7]);
}
// finds an address at a given index on the bus
// returns true if the device was found
bool DallasTemperature::getAddress(uint8_t* deviceAddress, uint8_t index)
{
uint8_t depth = 0;
_wire->reset_search();
while (depth <= index && _wire->search(deviceAddress))
{
if (depth == index && validAddress(deviceAddress)) return true;
depth++;
}
return false;
}
// attempt to determine if the device at the given address is connected to the bus
bool DallasTemperature::isConnected(const uint8_t* deviceAddress)
{
ScratchPad scratchPad;
return isConnected(deviceAddress, scratchPad);
}
// attempt to determine if the device at the given address is connected to the bus
// also allows for updating the read scratchpad
bool DallasTemperature::isConnected(const uint8_t* deviceAddress, uint8_t* scratchPad)
{
readScratchPad(deviceAddress, scratchPad);
return (_wire->crc8(scratchPad, 8) == scratchPad[SCRATCHPAD_CRC]);
}
// read device's scratch pad
void DallasTemperature::readScratchPad(const uint8_t* deviceAddress, uint8_t* scratchPad)
{
// send the command
_wire->reset();
_wire->select(deviceAddress);
_wire->write(READSCRATCH);
// TODO => collect all comments & use simple loop
// byte 0: temperature LSB
// byte 1: temperature MSB
// byte 2: high alarm temp
// byte 3: low alarm temp
// byte 4: DS18S20: store for crc
// DS18B20 & DS1822: configuration register
// byte 5: internal use & crc
// byte 6: DS18S20: COUNT_REMAIN
// DS18B20 & DS1822: store for crc
// byte 7: DS18S20: COUNT_PER_C
// DS18B20 & DS1822: store for crc
// byte 8: SCRATCHPAD_CRC
//
// for(int i=0; i<9; i++)
// {
// scratchPad[i] = _wire->read();
// }
// read the response
// byte 0: temperature LSB
scratchPad[TEMP_LSB] = _wire->read();
// byte 1: temperature MSB
scratchPad[TEMP_MSB] = _wire->read();
// byte 2: high alarm temp
scratchPad[HIGH_ALARM_TEMP] = _wire->read();
// byte 3: low alarm temp
scratchPad[LOW_ALARM_TEMP] = _wire->read();
// byte 4:
// DS18S20: store for crc
// DS18B20 & DS1822: configuration register
scratchPad[CONFIGURATION] = _wire->read();
// byte 5:
// internal use & crc
scratchPad[INTERNAL_BYTE] = _wire->read();
// byte 6:
// DS18S20: COUNT_REMAIN
// DS18B20 & DS1822: store for crc
scratchPad[COUNT_REMAIN] = _wire->read();
// byte 7:
// DS18S20: COUNT_PER_C
// DS18B20 & DS1822: store for crc
scratchPad[COUNT_PER_C] = _wire->read();
// byte 8:
// SCTRACHPAD_CRC
scratchPad[SCRATCHPAD_CRC] = _wire->read();
_wire->reset();
}
// writes device's scratch pad
void DallasTemperature::writeScratchPad(const uint8_t* deviceAddress, const uint8_t* scratchPad)
{
_wire->reset();
_wire->select(deviceAddress);
_wire->write(WRITESCRATCH);
_wire->write(scratchPad[HIGH_ALARM_TEMP]); // high alarm temp
_wire->write(scratchPad[LOW_ALARM_TEMP]); // low alarm temp
// DS1820 and DS18S20 have no configuration register
if (deviceAddress[0] != DS18S20MODEL) _wire->write(scratchPad[CONFIGURATION]); // configuration
_wire->reset();
_wire->select(deviceAddress); //<--this line was missing
// save the newly written values to eeprom
_wire->write(COPYSCRATCH, parasite);
if (parasite) delay(10); // 10ms delay
_wire->reset();
}
// reads the device's power requirements
bool DallasTemperature::readPowerSupply(const uint8_t* deviceAddress)
{
bool ret = false;
_wire->reset();
_wire->select(deviceAddress);
_wire->write(READPOWERSUPPLY);
if (_wire->read_bit() == 0) ret = true;
_wire->reset();
return ret;
}
// set resolution of all devices to 9, 10, 11, or 12 bits
// if new resolution is out of range, it is constrained.
void DallasTemperature::setResolution(uint8_t newResolution)
{
bitResolution = constrain(newResolution, 9, 12);
DeviceAddress deviceAddress;
for (int i=0; i<devices; i++)
{
getAddress(deviceAddress, i);
setResolution(deviceAddress, bitResolution);
}
}
// set resolution of a device to 9, 10, 11, or 12 bits
// if new resolution is out of range, 9 bits is used.
bool DallasTemperature::setResolution(const uint8_t* deviceAddress, uint8_t newResolution)
{
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad))
{
// DS1820 and DS18S20 have no resolution configuration register
if (deviceAddress[0] != DS18S20MODEL)
{
switch (newResolution)
{
case 12:
scratchPad[CONFIGURATION] = TEMP_12_BIT;
break;
case 11:
scratchPad[CONFIGURATION] = TEMP_11_BIT;
break;
case 10:
scratchPad[CONFIGURATION] = TEMP_10_BIT;
break;
case 9:
default:
scratchPad[CONFIGURATION] = TEMP_9_BIT;
break;
}
writeScratchPad(deviceAddress, scratchPad);
}
return true; // new value set
}
return false;
}
// returns the global resolution
uint8_t DallasTemperature::getResolution()
{
return bitResolution;
}
// returns the current resolution of the device, 9-12
// returns 0 if device not found
uint8_t DallasTemperature::getResolution(const uint8_t* deviceAddress)
{
// DS1820 and DS18S20 have no resolution configuration register
if (deviceAddress[0] == DS18S20MODEL) return 12;
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad))
{
switch (scratchPad[CONFIGURATION])
{
case TEMP_12_BIT:
return 12;
case TEMP_11_BIT:
return 11;
case TEMP_10_BIT:
return 10;
case TEMP_9_BIT:
return 9;
}
}
return 0;
}
// sets the value of the waitForConversion flag
// TRUE : function requestTemperature() etc returns when conversion is ready
// FALSE: function requestTemperature() etc returns immediately (USE WITH CARE!!)
// (1) programmer has to check if the needed delay has passed
// (2) but the application can do meaningful things in that time
void DallasTemperature::setWaitForConversion(bool flag)
{
waitForConversion = flag;
}
// gets the value of the waitForConversion flag
bool DallasTemperature::getWaitForConversion()
{
return waitForConversion;
}
// sets the value of the checkForConversion flag
// TRUE : function requestTemperature() etc will 'listen' to an IC to determine whether a conversion is complete
// FALSE: function requestTemperature() etc will wait a set time (worst case scenario) for a conversion to complete
void DallasTemperature::setCheckForConversion(bool flag)
{
checkForConversion = flag;
}
// gets the value of the waitForConversion flag
bool DallasTemperature::getCheckForConversion()
{
return checkForConversion;
}
bool DallasTemperature::isConversionAvailable(const uint8_t* deviceAddress)
{
// Check if the clock has been raised indicating the conversion is complete
ScratchPad scratchPad;
readScratchPad(deviceAddress, scratchPad);
return scratchPad[0];
}
// sends command for all devices on the bus to perform a temperature conversion
void DallasTemperature::requestTemperatures()
{
_wire->reset();
_wire->skip();
_wire->write(STARTCONVO, parasite);
// ASYNC mode?
if (!waitForConversion) return;
blockTillConversionComplete(bitResolution, NULL);
}
// sends command for one device to perform a temperature by address
// returns FALSE if device is disconnected
// returns TRUE otherwise
bool DallasTemperature::requestTemperaturesByAddress(const uint8_t* deviceAddress)
{
_wire->reset();
_wire->select(deviceAddress);
_wire->write(STARTCONVO, parasite);
// check device
ScratchPad scratchPad;
if (!isConnected(deviceAddress, scratchPad)) return false;
// ASYNC mode?
if (!waitForConversion) return true;
blockTillConversionComplete(getResolution(deviceAddress), deviceAddress);
return true;
}
// returns number of milliseconds to wait till conversion is complete (based on IC datasheet)
int16_t DallasTemperature::millisToWaitForConversion(uint8_t bitResolution)
{
switch (bitResolution)
{
case 9:
return 94;
case 10:
return 188;
case 11:
return 375;
default:
return 750;
}
}
// Continue to check if the IC has responded with a temperature
void DallasTemperature::blockTillConversionComplete(uint8_t bitResolution, const uint8_t* deviceAddress)
{
int delms = millisToWaitForConversion(bitResolution);
if (deviceAddress != NULL && checkForConversion && !parasite)
{
unsigned long timend = millis() + delms;
while(!isConversionAvailable(deviceAddress) && (millis() < timend));
}
else
{
delay(delms);
}
}
// sends command for one device to perform a temp conversion by index
bool DallasTemperature::requestTemperaturesByIndex(uint8_t deviceIndex)
{
DeviceAddress deviceAddress;
getAddress(deviceAddress, deviceIndex);
return requestTemperaturesByAddress(deviceAddress);
}
// Fetch temperature for device index
float DallasTemperature::getTempCByIndex(uint8_t deviceIndex)
{
DeviceAddress deviceAddress;
if (!getAddress(deviceAddress, deviceIndex))
return DEVICE_DISCONNECTED_C;
return getTempC((uint8_t*)deviceAddress);
}
// Fetch temperature for device index
float DallasTemperature::getTempFByIndex(uint8_t deviceIndex)
{
DeviceAddress deviceAddress;
if (!getAddress(deviceAddress, deviceIndex))
return DEVICE_DISCONNECTED_F;
return getTempF((uint8_t*)deviceAddress);
}
// reads scratchpad and returns fixed-point temperature, scaling factor 2^-7
int16_t DallasTemperature::calculateTemperature(const uint8_t* deviceAddress, uint8_t* scratchPad)
{
int16_t fpTemperature =
(((int16_t) scratchPad[TEMP_MSB]) << 11) |
(((int16_t) scratchPad[TEMP_LSB]) << 3);
/*
DS1820 and DS18S20 have a 9-bit temperature register.
Resolutions greater than 9-bit can be calculated using the data from
the temperature, and COUNT REMAIN and COUNT PER C registers in the
scratchpad. The resolution of the calculation depends on the model.
While the COUNT PER C register is hard-wired to 16 (10h) in a
DS18S20, it changes with temperature in DS1820.
After reading the scratchpad, the TEMP_READ value is obtained by
truncating the 0.5C bit (bit 0) from the temperature data. The
extended resolution temperature can then be calculated using the
following equation:
COUNT_PER_C - COUNT_REMAIN
TEMPERATURE = TEMP_READ - 0.25 + --------------------------
COUNT_PER_C
Hagai Shatz simplified this to integer arithmetic for a 12 bits
value for a DS18S20, and James Cameron added legacy DS1820 support.
See - http://myarduinotoy.blogspot.co.uk/2013/02/12bit-result-from-ds18s20.html
*/
if (deviceAddress[0] == DS18S20MODEL)
fpTemperature = ((fpTemperature & 0xfff0) << 3) - 16 +
(
((scratchPad[COUNT_PER_C] - scratchPad[COUNT_REMAIN]) << 7) /
scratchPad[COUNT_PER_C]
);
return fpTemperature;
}
// returns temperature in 1/128 degrees C or DEVICE_DISCONNECTED_RAW if the
// device's scratch pad cannot be read successfully.
// the numeric value of DEVICE_DISCONNECTED_RAW is defined in
// DallasTemperature.h. It is a large negative number outside the
// operating range of the device
int16_t DallasTemperature::getTemp(const uint8_t* deviceAddress)
{
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad)) return calculateTemperature(deviceAddress, scratchPad);
return DEVICE_DISCONNECTED_RAW;
}
// returns temperature in degrees C or DEVICE_DISCONNECTED_C if the
// device's scratch pad cannot be read successfully.
// the numeric value of DEVICE_DISCONNECTED_C is defined in
// DallasTemperature.h. It is a large negative number outside the
// operating range of the device
float DallasTemperature::getTempC(const uint8_t* deviceAddress)
{
return rawToCelsius(getTemp(deviceAddress));
}
// returns temperature in degrees F or DEVICE_DISCONNECTED_F if the
// device's scratch pad cannot be read successfully.
// the numeric value of DEVICE_DISCONNECTED_F is defined in
// DallasTemperature.h. It is a large negative number outside the
// operating range of the device
float DallasTemperature::getTempF(const uint8_t* deviceAddress)
{
return rawToFahrenheit(getTemp(deviceAddress));
}
// returns true if the bus requires parasite power
bool DallasTemperature::isParasitePowerMode(void)
{
return parasite;
}
#if REQUIRESALARMS
/*
ALARMS:
TH and TL Register Format
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
S 2^6 2^5 2^4 2^3 2^2 2^1 2^0
Only bits 11 through 4 of the temperature register are used
in the TH and TL comparison since TH and TL are 8-bit
registers. If the measured temperature is lower than or equal
to TL or higher than or equal to TH, an alarm condition exists
and an alarm flag is set inside the DS18B20. This flag is
updated after every temperature measurement; therefore, if the
alarm condition goes away, the flag will be turned off after
the next temperature conversion.
*/
// sets the high alarm temperature for a device in degrees Celsius
// accepts a float, but the alarm resolution will ignore anything
// after a decimal point. valid range is -55C - 125C
void DallasTemperature::setHighAlarmTemp(const uint8_t* deviceAddress, char celsius)
{
// make sure the alarm temperature is within the device's range
if (celsius > 125) celsius = 125;
else if (celsius < -55) celsius = -55;
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad))
{
scratchPad[HIGH_ALARM_TEMP] = (uint8_t)celsius;
writeScratchPad(deviceAddress, scratchPad);
}
}
// sets the low alarm temperature for a device in degrees Celsius
// accepts a float, but the alarm resolution will ignore anything
// after a decimal point. valid range is -55C - 125C
void DallasTemperature::setLowAlarmTemp(const uint8_t* deviceAddress, char celsius)
{
// make sure the alarm temperature is within the device's range
if (celsius > 125) celsius = 125;
else if (celsius < -55) celsius = -55;
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad))
{
scratchPad[LOW_ALARM_TEMP] = (uint8_t)celsius;
writeScratchPad(deviceAddress, scratchPad);
}
}
// returns a char with the current high alarm temperature or
// DEVICE_DISCONNECTED for an address
char DallasTemperature::getHighAlarmTemp(const uint8_t* deviceAddress)
{
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad)) return (char)scratchPad[HIGH_ALARM_TEMP];
return DEVICE_DISCONNECTED_C;
}
// returns a char with the current low alarm temperature or
// DEVICE_DISCONNECTED for an address
char DallasTemperature::getLowAlarmTemp(const uint8_t* deviceAddress)
{
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad)) return (char)scratchPad[LOW_ALARM_TEMP];
return DEVICE_DISCONNECTED_C;
}
// resets internal variables used for the alarm search
void DallasTemperature::resetAlarmSearch()
{
alarmSearchJunction = -1;
alarmSearchExhausted = 0;
for(uint8_t i = 0; i < 7; i++)
alarmSearchAddress[i] = 0;
}
// This is a modified version of the OneWire::search method.
//
// Also added the OneWire search fix documented here:
// http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1238032295
//
// Perform an alarm search. If this function returns a '1' then it has
// enumerated the next device and you may retrieve the ROM from the
// OneWire::address variable. If there are no devices, no further
// devices, or something horrible happens in the middle of the
// enumeration then a 0 is returned. If a new device is found then
// its address is copied to newAddr. Use
// DallasTemperature::resetAlarmSearch() to start over.
bool DallasTemperature::alarmSearch(uint8_t* newAddr)
{
uint8_t i;
char lastJunction = -1;
uint8_t done = 1;
if (alarmSearchExhausted) return false;
if (!_wire->reset()) return false;
// send the alarm search command
_wire->write(0xEC, 0);
for(i = 0; i < 64; i++)
{
uint8_t a = _wire->read_bit( );
uint8_t nota = _wire->read_bit( );
uint8_t ibyte = i / 8;
uint8_t ibit = 1 << (i & 7);
// I don't think this should happen, this means nothing responded, but maybe if
// something vanishes during the search it will come up.
if (a && nota) return false;
if (!a && !nota)
{
if (i == alarmSearchJunction)
{
// this is our time to decide differently, we went zero last time, go one.
a = 1;
alarmSearchJunction = lastJunction;
}
else if (i < alarmSearchJunction)
{
// take whatever we took last time, look in address
if (alarmSearchAddress[ibyte] & ibit) a = 1;
else
{
// Only 0s count as pending junctions, we've already exhausted the 0 side of 1s
a = 0;
done = 0;
lastJunction = i;
}
}
else
{
// we are blazing new tree, take the 0
a = 0;
alarmSearchJunction = i;
done = 0;
}
// OneWire search fix
// See: http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1238032295
}
if (a) alarmSearchAddress[ibyte] |= ibit;
else alarmSearchAddress[ibyte] &= ~ibit;
_wire->write_bit(a);
}
if (done) alarmSearchExhausted = 1;
for (i = 0; i < 8; i++) newAddr[i] = alarmSearchAddress[i];
return true;
}
// returns true if device address might have an alarm condition
// (only an alarm search can verify this)
bool DallasTemperature::hasAlarm(const uint8_t* deviceAddress)
{
ScratchPad scratchPad;
if (isConnected(deviceAddress, scratchPad))
{
char temp = calculateTemperature(deviceAddress, scratchPad) >> 7;
// check low alarm
if (temp <= (char)scratchPad[LOW_ALARM_TEMP]) return true;
// check high alarm
if (temp >= (char)scratchPad[HIGH_ALARM_TEMP]) return true;
}
// no alarm
return false;
}
// returns true if any device is reporting an alarm condition on the bus
bool DallasTemperature::hasAlarm(void)
{
DeviceAddress deviceAddress;
resetAlarmSearch();
return alarmSearch(deviceAddress);
}
// runs the alarm handler for all devices returned by alarmSearch()
void DallasTemperature::processAlarms(void)
{
resetAlarmSearch();
DeviceAddress alarmAddr;
while (alarmSearch(alarmAddr))
{
if (validAddress(alarmAddr))
_AlarmHandler(alarmAddr);
}
}
// sets the alarm handler
void DallasTemperature::setAlarmHandler(AlarmHandler *handler)
{
_AlarmHandler = handler;
}
// The default alarm handler
void DallasTemperature::defaultAlarmHandler(const uint8_t* deviceAddress)
{
}
#endif
// Convert float Celsius to Fahrenheit
float DallasTemperature::toFahrenheit(float celsius)
{
return (celsius * 1.8) + 32;
}
// Convert float Fahrenheit to Celsius
float DallasTemperature::toCelsius(float fahrenheit)
{
return (fahrenheit - 32) * 0.555555556;
}
// convert from raw to Celsius
float DallasTemperature::rawToCelsius(int16_t raw)
{
if (raw <= DEVICE_DISCONNECTED_RAW)
return DEVICE_DISCONNECTED_C;
// C = RAW/128
return (float)raw * 0.0078125;
}
// convert from raw to Fahrenheit
float DallasTemperature::rawToFahrenheit(int16_t raw)
{
if (raw <= DEVICE_DISCONNECTED_RAW)
return DEVICE_DISCONNECTED_F;
// C = RAW/128
// F = (C*1.8)+32 = (RAW/128*1.8)+32 = (RAW*0.0140625)+32
return ((float)raw * 0.0140625) + 32;
}
#if REQUIRESNEW
// MnetCS - Allocates memory for DallasTemperature. Allows us to instance a new object
void* DallasTemperature::operator new(unsigned int size) // Implicit NSS obj size
{
void * p; // void pointer
p = malloc(size); // Allocate memory
memset((DallasTemperature*)p,0,size); // Initialise memory
//!!! CANT EXPLICITLY CALL CONSTRUCTOR - workaround by using an init() methodR - workaround by using an init() method
return (DallasTemperature*) p; // Cast blank region to NSS pointer
}
// MnetCS 2009 - Free the memory used by this instance
void DallasTemperature::operator delete(void* p)
{
DallasTemperature* pNss = (DallasTemperature*) p; // Cast to NSS pointer
pNss->~DallasTemperature(); // Destruct the object
free(p); // Free the memory
}
#endif
#ifndef DallasTemperature_h
#define DallasTemperature_h
#define DALLASTEMPLIBVERSION "3.7.2"
// This library is free software; you can redistribute it and/or
// modify it under the terms of the GNU Lesser General Public
// License as published by the Free Software Foundation; either
// version 2.1 of the License, or (at your option) any later version.
// set to true to include code for new and delete operators
#ifndef REQUIRESNEW
#define REQUIRESNEW false
#endif
// set to true to include code implementing alarm search functions
#ifndef REQUIRESALARMS
#define REQUIRESALARMS true
#endif
#include <inttypes.h>
#if defined(ARDUINO) && ARDUINO >= 100
#include <OneWire.h>
#elif defined(SPARK) or defined(STM32F10X_MD)
#include "application.h"
#include "OneWire.h"
#endif
// Model IDs
#define DS18S20MODEL 0x10 // also DS1820
#define DS18B20MODEL 0x28
#define DS1822MODEL 0x22
#define DS1825MODEL 0x3B
// OneWire commands
#define STARTCONVO 0x44 // Tells device to take a temperature reading and put it on the scratchpad
#define COPYSCRATCH 0x48 // Copy EEPROM
#define READSCRATCH 0xBE // Read EEPROM
#define WRITESCRATCH 0x4E // Write to EEPROM
#define RECALLSCRATCH 0xB8 // Reload from last known
#define READPOWERSUPPLY 0xB4 // Determine if device needs parasite power
#define ALARMSEARCH 0xEC // Query bus for devices with an alarm condition
// Scratchpad locations
#define TEMP_LSB 0
#define TEMP_MSB 1
#define HIGH_ALARM_TEMP 2
#define LOW_ALARM_TEMP 3
#define CONFIGURATION 4
#define INTERNAL_BYTE 5
#define COUNT_REMAIN 6
#define COUNT_PER_C 7
#define SCRATCHPAD_CRC 8
// Device resolution
#define TEMP_9_BIT 0x1F // 9 bit
#define TEMP_10_BIT 0x3F // 10 bit
#define TEMP_11_BIT 0x5F // 11 bit
#define TEMP_12_BIT 0x7F // 12 bit
// Error Codes
#define DEVICE_DISCONNECTED_C -127
#define DEVICE_DISCONNECTED_F -196.6
#define DEVICE_DISCONNECTED_RAW -7040
typedef uint8_t DeviceAddress[8];
class DallasTemperature
{
public:
DallasTemperature(OneWire*);
// initialise bus
void begin(void);
// returns the number of devices found on the bus
uint8_t getDeviceCount(void);
// returns true if address is valid
bool validAddress(const uint8_t*);
// finds an address at a given index on the bus
bool getAddress(uint8_t*, uint8_t);
// attempt to determine if the device at the given address is connected to the bus
bool isConnected(const uint8_t*);
// attempt to determine if the device at the given address is connected to the bus
// also allows for updating the read scratchpad
bool isConnected(const uint8_t*, uint8_t*);
// read device's scratchpad
void readScratchPad(const uint8_t*, uint8_t*);
// write device's scratchpad
void writeScratchPad(const uint8_t*, const uint8_t*);
// read device's power requirements
bool readPowerSupply(const uint8_t*);
// get global resolution
uint8_t getResolution();
// set global resolution to 9, 10, 11, or 12 bits
void setResolution(uint8_t);
// returns the device resolution: 9, 10, 11, or 12 bits
uint8_t getResolution(const uint8_t*);
// set resolution of a device to 9, 10, 11, or 12 bits
bool setResolution(const uint8_t*, uint8_t);
// sets/gets the waitForConversion flag
void setWaitForConversion(bool);
bool getWaitForConversion(void);
// sets/gets the checkForConversion flag
void setCheckForConversion(bool);
bool getCheckForConversion(void);
// sends command for all devices on the bus to perform a temperature conversion
void requestTemperatures(void);
// sends command for one device to perform a temperature conversion by address
bool requestTemperaturesByAddress(const uint8_t*);
// sends command for one device to perform a temperature conversion by index
bool requestTemperaturesByIndex(uint8_t);
// returns temperature raw value (12 bit integer of 1/16 degrees C)
int16_t getTemp(const uint8_t*);
// returns temperature in degrees C
float getTempC(const uint8_t*);
// returns temperature in degrees F
float getTempF(const uint8_t*);
// Get temperature for device index (slow)
float getTempCByIndex(uint8_t);
// Get temperature for device index (slow)
float getTempFByIndex(uint8_t);
// returns true if the bus requires parasite power
bool isParasitePowerMode(void);
bool isConversionAvailable(const uint8_t*);
#if REQUIRESALARMS
typedef void AlarmHandler(const uint8_t*);
// sets the high alarm temperature for a device
// accepts a char. valid range is -55C - 125C
void setHighAlarmTemp(const uint8_t*, char);
// sets the low alarm temperature for a device
// accepts a char. valid range is -55C - 125C
void setLowAlarmTemp(const uint8_t*, char);
// returns a signed char with the current high alarm temperature for a device
// in the range -55C - 125C
char getHighAlarmTemp(const uint8_t*);
// returns a signed char with the current low alarm temperature for a device
// in the range -55C - 125C
char getLowAlarmTemp(const uint8_t*);
// resets internal variables used for the alarm search
void resetAlarmSearch(void);
// search the wire for devices with active alarms
bool alarmSearch(uint8_t*);
// returns true if ia specific device has an alarm
bool hasAlarm(const uint8_t*);
// returns true if any device is reporting an alarm on the bus
bool hasAlarm(void);
// runs the alarm handler for all devices returned by alarmSearch()
void processAlarms(void);
// sets the alarm handler
void setAlarmHandler(const AlarmHandler *);
// The default alarm handler
static void defaultAlarmHandler(const uint8_t*);
#endif
// convert from Celsius to Fahrenheit
static float toFahrenheit(float);
// convert from Fahrenheit to Celsius
static float toCelsius(float);
// convert from raw to Celsius
static float rawToCelsius(int16_t);
// convert from raw to Fahrenheit
static float rawToFahrenheit(int16_t);
#if REQUIRESNEW
// initialize memory area
void* operator new (unsigned int);
// delete memory reference
void operator delete(void*);
#endif
private:
typedef uint8_t ScratchPad[9];
// parasite power on or off
bool parasite;
// used to determine the delay amount needed to allow for the
// temperature conversion to take place
uint8_t bitResolution;
// used to requestTemperature with or without delay
bool waitForConversion;
// used to requestTemperature to dynamically check if a conversion is complete
bool checkForConversion;
// count of devices on the bus
uint8_t devices;
// Take a pointer to one wire instance
OneWire* _wire;
// reads scratchpad and returns the raw temperature
int16_t calculateTemperature(const uint8_t*, uint8_t*);
int16_t millisToWaitForConversion(uint8_t);
void blockTillConversionComplete(uint8_t, const uint8_t*);
#if REQUIRESALARMS
// required for alarmSearch
uint8_t alarmSearchAddress[8];
char alarmSearchJunction;
uint8_t alarmSearchExhausted;
// the alarm handler function pointer
AlarmHandler *_AlarmHandler;
#endif
};
#endif







{kind=link}
{kind=link}
Comments