REES52 Breadboard Jumper Cables Kit, Set of 120 (Multicolor)
Photron Precision Magnetic ScrewDriver 31 in 1 Repairing Tool Set Kit Replaceable Straight Screw-Driver MultiTool Hand Tool
Story
This project is basically a different application of theCNC pen plotter. The main goal of my project is that the CNC pen plotter will attach to white boards, which areliterally used in college or universityclasses, and usedbyteachers or professors to write or explain their lectures into it withthe marker pen.With mysystem, they don't have to write it with marker, rather they will sit down and write their lecture with a custom built pen which has motion sensing capability. The CNC machine then replicates this motion onto the white board. I have made a prototype of thisCNC and tested our project code through that.
Check out the working model of my project.
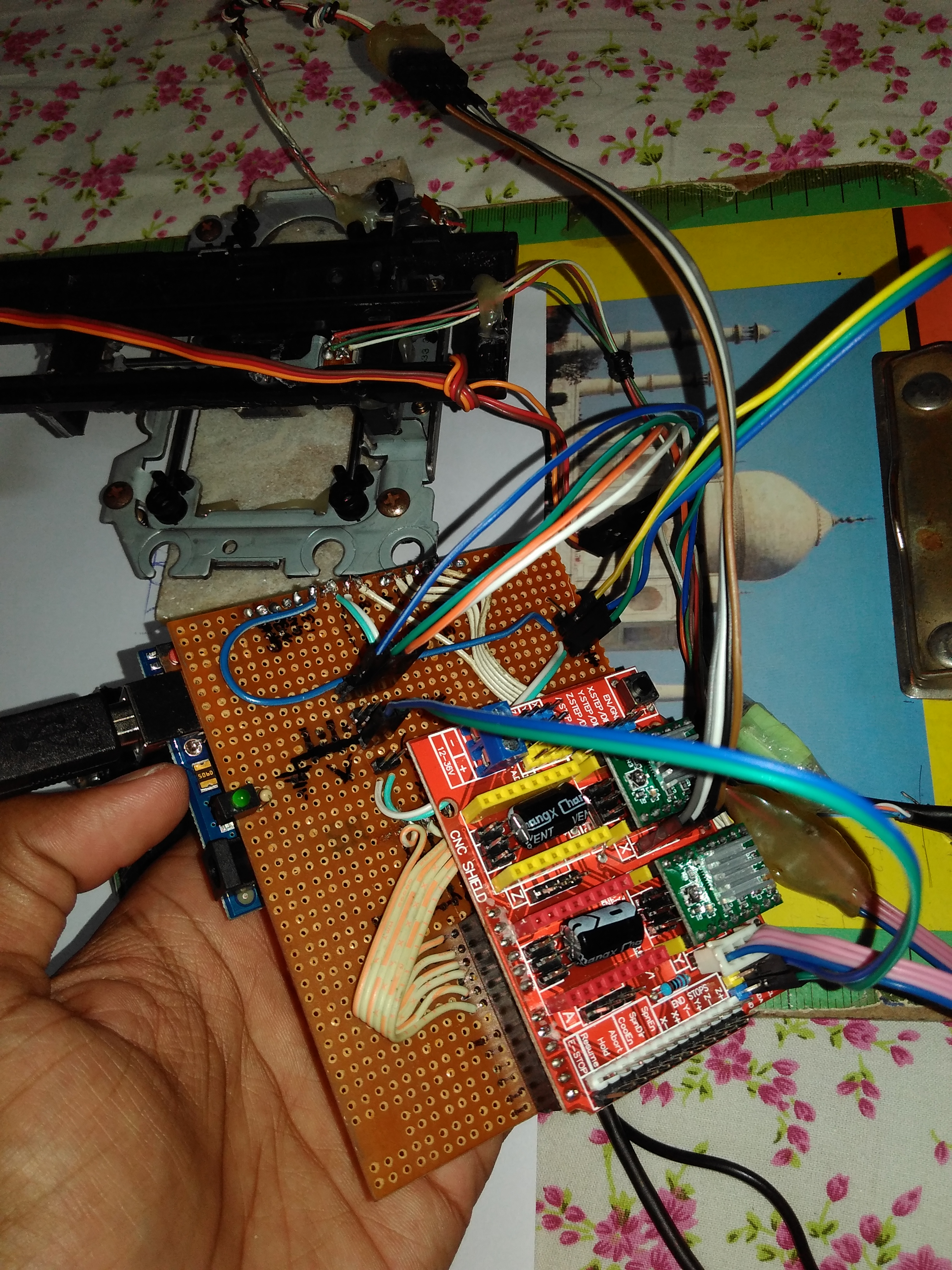
CNC Pen Plotter Images...
X_Stepper motor
Y_Stepper motor
Z_Servo
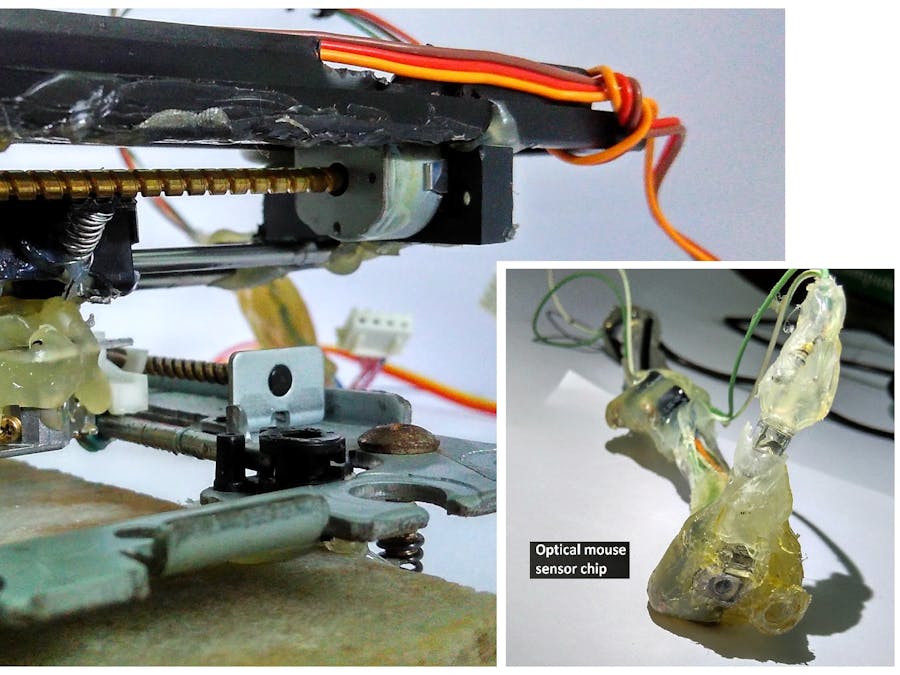
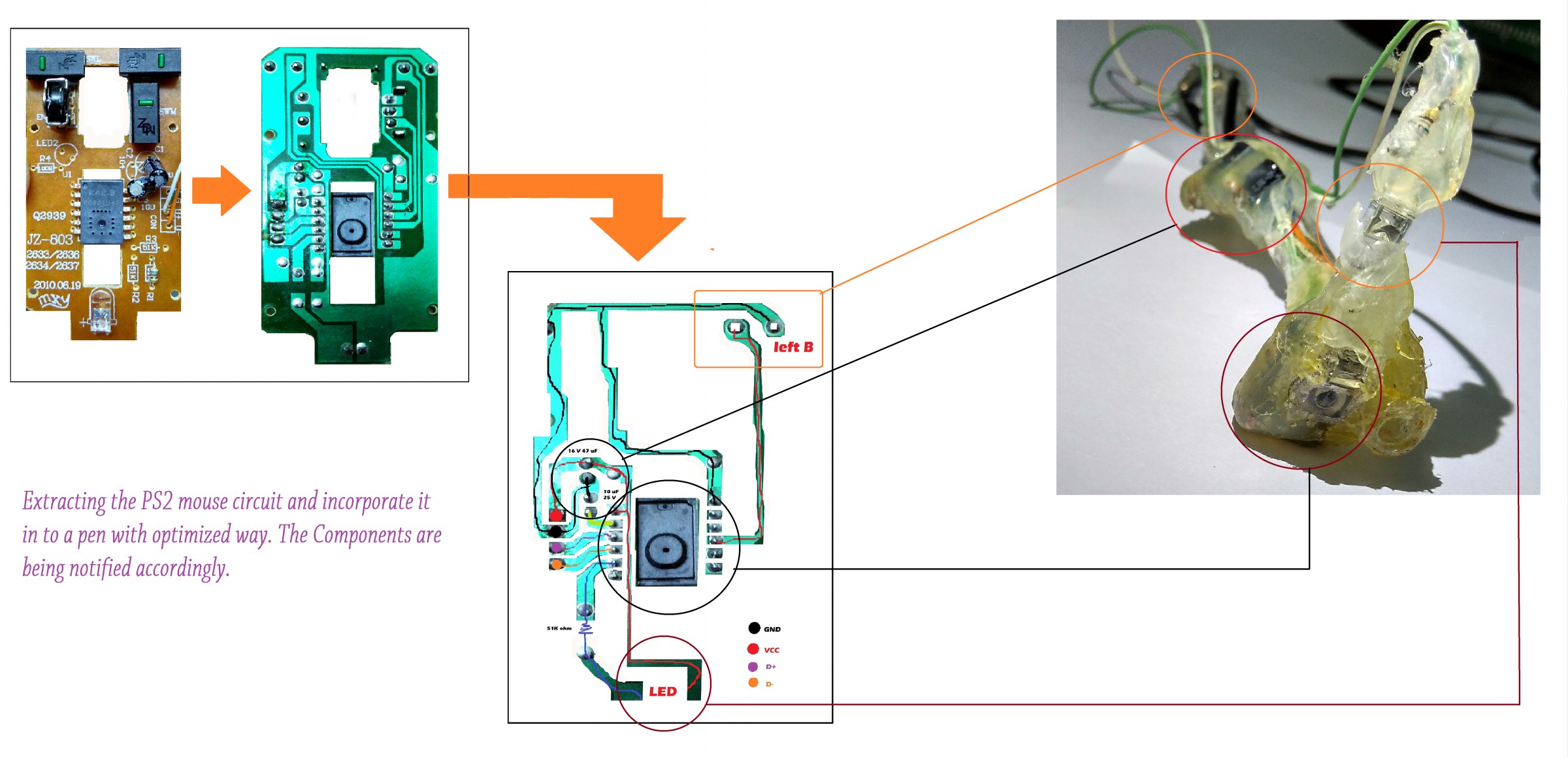
Motion Sensing Pen...
Optical motion sensing chip attached to the front end of the pen
Left mouse button attached to the end of the pen
Left mouse button attached to the end of the pen which will be clicked by the end point of refill and Z-axis will be activated in real time.
We can also introduce any of the curve smoothing algorithm to smooth the curve.As I am using the Arduino UNO so I did't use the mentioned method.We have to use Arduino Mega to implement that for more processing power.
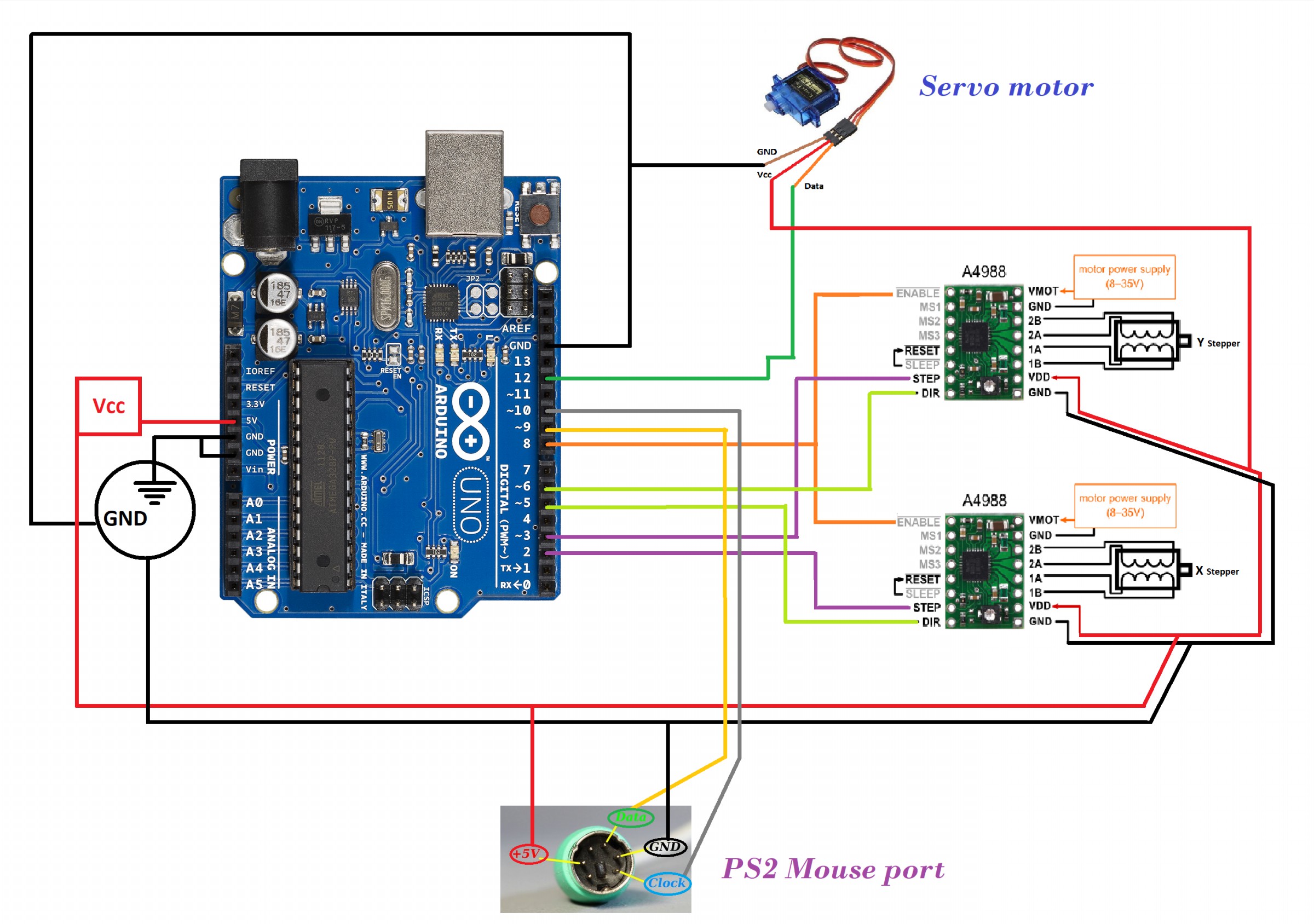
#include<AccelStepper.h>#include<MultiStepper.h>#include<PS2Mouse.h>#include<Servo.h> // for the Arduino Uno + CNC shield V3#define MOTOR_A_ENABLE_PIN 8#define MOTOR_A_STEP_PIN 2#define MOTOR_A_DIR_PIN 5#define MOTOR_B_ENABLE_PIN 8#define MOTOR_B_STEP_PIN 3#define MOTOR_B_DIR_PIN 6#define MDATA 10#define MCLK 9PS2Mousemouse(MCLK,MDATA,STREAM);AccelStepperstepper1(1,MOTOR_A_STEP_PIN,MOTOR_A_DIR_PIN);AccelStepperstepper2(1,MOTOR_B_STEP_PIN,MOTOR_B_DIR_PIN);Servomyservo;intservo_pos=0;MultiStepperxy;intx=0,y=0,posx=0,posy=0;voidsetup(){Serial.begin(9600);myservo.attach(12);stepper1.setEnablePin(MOTOR_A_ENABLE_PIN);stepper1.setPinsInverted(false,false,true);stepper2.setEnablePin(MOTOR_B_ENABLE_PIN);stepper2.setPinsInverted(false,false,true);// Configure each stepperstepper1.setMaxSpeed(100);stepper2.setMaxSpeed(100);// Then give them to MultiStepper to managexy.addStepper(stepper1);xy.addStepper(stepper2);stepper1.enableOutputs();stepper2.enableOutputs();mouse.initialize();}voidloop(){intdata[3];longposition[2];mouse.report(data);// x+=Filter.run(data[1]);x+=data[1];//y+=Filter.run(data[2]);y+=data[2];if(x>6000)x=6000;elseif(x<-6000)x=-6000;elseif(y>6000)y=6000;elseif(y<-6000)y=-6000;else{position[0]=-x/7;position[1]=-y/7;/*---------------------------------------------*/Serial.print(data[0]);//status byteSerial.print(":");Serial.print(position[0]);//X valueSerial.print(",");Serial.print(position[1]);//Y valueSerial.println();/*---------------------------------------------*/if(data[0]==9||data[0]==25||data[0]==41||data[0]==57)myservo.write(170);//pen downelseif(data[0]==8||data[0]==40||data[0]==24||data[0]==56)myservo.write(90);//pen up xy.moveTo(position);xy.runSpeedToPosition();// posx=x;// posy=y;}//delay(100);}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments