#include <MKRGSM.h>
#include <ArduinoUniqueID.h>
#include <ArduinoJson.h>
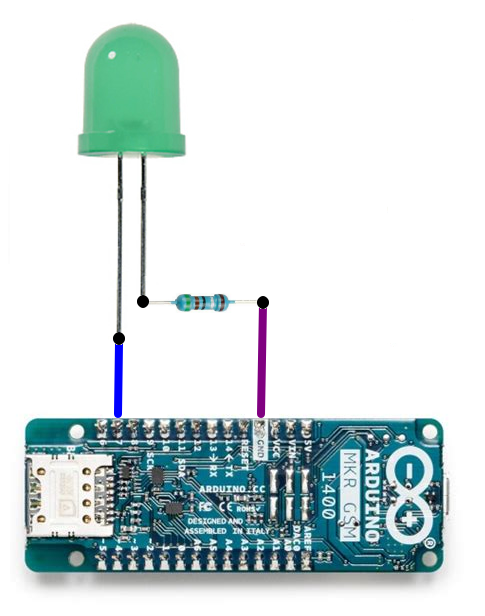
// LED (Config)
#define PIN_LED 7
// number of loops to wait for the end of initialization
#define TECHNOLOGY_INIT_WAITING 7
#define LEN_MODEM_AT 4
const unsigned char MODEM_AT[LEN_MODEM_AT] = {'a', 't', '\r', '\n'};
#define LEN_MODEM_AT_CREG 10
const unsigned char MODEM_AT_CREG[LEN_MODEM_AT_CREG] = {'a', 't', '+', 'c', 'r', 'e', 'g', '?', '\r', '\n'};
#define LEN_MODEM_CREG 8
const char MODEM_CREG[LEN_MODEM_CREG] = {'+', 'C', 'R', 'E', 'G', ':', ' ', '\0'};
#define LEN_MODEM_AT_CSIM 8
const unsigned char MODEM_AT_CSIM[LEN_MODEM_AT_CSIM] = {'a', 't', '+', 'c', 's', 'i', 'm', '='};
#define LEN_MODEM_CSIM 8
const char MODEM_CSIM[LEN_MODEM_CSIM] = {'+', 'C', 'S', 'I', 'M', ':', ' ', '\0'};
#define LEN_APDU_HEADER 5
const char APDU_MANAGE_CHANNEL[LEN_APDU_HEADER] = { 0x00, 0x70, 0x00, 0x00, 0x00 };
const char APDU_SELECT[LEN_APDU_HEADER] = { 0x00, (char)0xA4, 0x04, 0x0C, 0x00 };
#define APDU_ISO_CLA 0x00
#define APDU_PUT_DATA_INS 0xda
#define APDU_PUT_DATA_P1 0x02
#define APDU_GET_DATA_INS 0xca
#define APDU_GET_DATA_MODE_REQUEST 0x00
#define APDU_GET_DATA_MODE_DATA 0x01
#define APDU_GET_STATUS_INS 0xcc
#define APDU_GET_STATUS_MODE_GET 0x02
#define APDU_GET_STATUS_LEN_GET 0x04
#define APDU_GET_RESPONSE_INS 0xc0
#define STATUS_RECEIVE_DONE 0x0003
#define STATUS_RECEIVE_DATA 0x0007
#define STATUS_RECEIVE_ERROR 0x000f
#define LEN_AID_SAFE2 12
const char AID_SAFE2[LEN_AID_SAFE2] = {(char)0xf0, 0x70, 0x6F, 0x64, 0x67, 0x73, 0x61, 0x66, 0x65, 0x32, 0x01, 0x01 };
#define LEN_MODEM_OK 4
const char MODEM_OK[LEN_MODEM_OK] = {'O', 'K', '\r', '\0'};
#define LEN_MODEM_ERROR 7
const char MODEM_ERROR[LEN_MODEM_ERROR] = {'E', 'R', 'R', 'O', 'R', '\r', '\0'};
#define LEN_1_CHAR_MAX 10
#define LEN_2_CHARS_MAX 100
#define CR '\r'
#define EOL '\n'
// IO buffer used for AT commands proceeding, size = header + 256 * 2
#define LEN_IO_BUFFER 600
char buf[LEN_IO_BUFFER];
#define LEN_DATA_BUF 4
unsigned char dataBuf[LEN_DATA_BUF];
unsigned char apdu_header[LEN_APDU_HEADER];
unsigned char regFlag;
#define STATE_READY 0x00
#define STATE_REQUEST_SENT 0x01
#define STATE_REQUEST_DATA 0x02
#define STATE_DONE 0x03
#define LEN_DEVICE_ID_MAX 16
unsigned char id[LEN_DEVICE_ID_MAX];
char gState;
char gChan;
#define JSON_CONFIG_CAPACITY 384
//DynamicJsonDocument cfg(JSON_CONFIG_CAPACITY);
StaticJsonDocument<192> cfg;
char registered(char * resp) {
char b = *resp;
b &= 0x0f;
resp++;
if (*resp != CR) {
// 2-chars <stat> value
b *= 10;
b += *resp - 0x30;
}
switch (b) {
case 1: // 1: registered, home network
case 5: // 5: registered, roaming
return true;
default:
return false;
}
}
void logData(char * dataBuf, char len) {
int dataLen = (unsigned char)len;
int blockLen;
int ofs = 0;
while (dataLen > 0) {
blockLen = Serial.availableForWrite();
if (blockLen < 1) {
delay(1);
continue;
}
if (blockLen > dataLen) {
blockLen = dataLen;
}
Serial.write(&dataBuf[ofs], blockLen);
ofs += blockLen;
dataLen -= blockLen;
}
Serial.flush();
}
void atCommand(char * cmdBuf, short len) {
short cmdLen = len;
short blockLen;
short ofs = 0;
while (cmdLen > 0) {
blockLen = SerialGSM.availableForWrite();
if (blockLen < 1) {
delay(1);
continue;
}
if (blockLen > cmdLen) {
blockLen = cmdLen;
}
SerialGSM.write(&cmdBuf[ofs], blockLen);
ofs += blockLen;
cmdLen -= blockLen;
}
SerialGSM.flush();
}
#define CNTR_MAX 10000
short atResponse(char * respBuf) {
// read AT response
short cntr = 0;
char * ptr;
short len = 0;
short blockLen;
// initialize for timeout
respBuf[0] = 0;
do {
blockLen = SerialGSM.readBytesUntil(EOL, &respBuf[len], (int)(LEN_IO_BUFFER - len));
if (blockLen > 0) {
len += blockLen;
respBuf[len++] = EOL;
respBuf[len] = 0;
}
ptr = strstr(respBuf, MODEM_OK);
if (ptr == NULL) {
ptr = strstr(respBuf, MODEM_ERROR);
}
} while (ptr == NULL);
return len;
}
char decimalPut(int v, char * dst) {
char ofs = 0;
// number of chars populated
char cnt = 1;
char b;
// safety check - shall be redesigned for negative numbers
if (v < 0) {
v = 0;
}
if (v >= LEN_1_CHAR_MAX) {
ofs++;
cnt++;
}
if (v >= LEN_2_CHARS_MAX) {
ofs++;
cnt++;
}
// at least 1 digit shall be populated
do {
b = (char)(v % 10);
dst[ofs--] = '0' + b;
v -= b;
v /= 10;
} while (v > 0);
return cnt;
}
#define LEN_HEX 16
const char HEX_CONVERSION[LEN_HEX] = {'0', '1', '2', '3', '4', '5', '6', '7', '8', '9', 'A', 'B', 'C', 'D', 'E', 'F'};
void hexPut(char b, char * dst) {
dst[0] = HEX_CONVERSION[(b >> 4) & 0x0f];
dst[1] = HEX_CONVERSION[b & 0x0f];
}
#define LEN_BYTE_HEX 2
short buildAtCsim(char * cmdBuf, char cla, char * apduBuf, char * dataBuf, short dataLen) {
short len = LEN_APDU_HEADER;
short ofs = 0;
if (dataBuf != NULL) {
len += dataLen;
}
memcpy(cmdBuf, MODEM_AT_CSIM, LEN_MODEM_AT_CSIM);
ofs = LEN_MODEM_AT_CSIM;
ofs += decimalPut(len << 1, &cmdBuf[ofs]);
cmdBuf[ofs++] = ',';
cmdBuf[ofs++] = '"';
// put CLA
hexPut(apduBuf[0] | cla, &cmdBuf[ofs]);
ofs += LEN_BYTE_HEX;
// put INS, P1, P2
for (char i=1; i<4; i++) {
hexPut(apduBuf[i], &cmdBuf[ofs]);
ofs += LEN_BYTE_HEX;
}
// put LEN
hexPut(dataLen, &cmdBuf[ofs]);
ofs += LEN_BYTE_HEX;
if ((dataLen > 0) && (dataBuf != NULL)) {
// put Data
for (short i=0; i<dataLen; i++) {
hexPut(dataBuf[i], &cmdBuf[ofs]);
ofs += LEN_BYTE_HEX;
}
}
cmdBuf[ofs++] = '"';
cmdBuf[ofs++] = '\r';
cmdBuf[ofs++] = '\n';
cmdBuf[ofs] = 0;
return ofs;
}
#define RES_OK 0x00
#define RES_INVALID_CSIM_RESPONSE 0x01
#define RES_INVALID_OPEN_CHANNEL_RESPONSE 0x02
#define RES_INVALID_CHANNEL_ID 0x03
#define RES_UNEXPECTED_GET_STATUS_RESPONSE 0x04
#define RES_INVALID_GET_STATUS_RESPONSE 0x05
#define RES_UNEXPECTED_GET_DATA_RESPONSE 0x06
#define RES_INVALID_GET_DATA_RESPONSE 0x07
#define RES_JSON_DESERIALIZATION_FAILED 0x08
#define OFS_APDU_CLA 0x00
#define OFS_APDU_INS 0x01
#define OFS_APDU_P1 0x02
#define OFS_APDU_P2 0x03
#define OFS_APDU_LEN 0x05
#define MODE_CHANNEL_CLOSE 0x80
#define TAG_DEVICE_ID 0xc0
#define TAG_DEVICE_DATA 0xc1
char simChannelOpen(char * chan) {
// put AT SIM command: Open Supplementary Logical Channel
short cmdLen = buildAtCsim(buf, 0, (char *)APDU_MANAGE_CHANNEL, (char *)NULL, 1);
atCommand(buf, cmdLen);
short respLen = atResponse(buf);
logData(buf, respLen);
// analyze response
char * ptr;
ptr = strstr(buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response");
return RES_INVALID_CSIM_RESPONSE;
}
if ((ptr[LEN_MODEM_CSIM - 1] != '6') ||
(ptr[LEN_MODEM_CSIM + 0] != ',') ||
(ptr[LEN_MODEM_CSIM + 1] != '"') ||
(ptr[LEN_MODEM_CSIM + 2] != '0')) {
Serial.println("Unexpected response for MANAGE CHANNEL");
return RES_INVALID_OPEN_CHANNEL_RESPONSE;
}
// extract channel ID
char ch = ptr[LEN_MODEM_CSIM + 3] - '0';
if ((ch <= 0) || (ch >= 4)) {
Serial.print("Unexpected response (chan ID) for MANAGE CHANNEL: ");
Serial.println(ch);
return RES_INVALID_CHANNEL_ID;
}
*chan = ch;
return RES_OK;
}
char simChannelClose(char chan) {
// close supplementary logical channel
memcpy(apdu_header, APDU_MANAGE_CHANNEL, LEN_APDU_HEADER);
apdu_header[OFS_APDU_P1] = MODE_CHANNEL_CLOSE;
apdu_header[OFS_APDU_P2] = chan;
short cmdLen = buildAtCsim(buf, 0, (char *)apdu_header, (char *)NULL, 0);
atCommand(buf, cmdLen);
short respLen = atResponse(buf);
logData(buf, respLen);
return RES_OK;
}
char simSelectSafe2(char chan) {
// SELECT (by AID) SAFE2
short cmdLen = buildAtCsim(buf, chan, (char *)APDU_SELECT, (char *)AID_SAFE2, LEN_AID_SAFE2);
atCommand(buf, cmdLen);
short respLen = atResponse(buf);
logData(buf, respLen);
return RES_OK;
}
char simGetData(char chan, char mode, unsigned char * buf, short * len) {
// PUT DATA (from dataBuffer)
char bh, bl;
apdu_header[OFS_APDU_CLA] = APDU_ISO_CLA;
apdu_header[OFS_APDU_INS] = APDU_GET_DATA_INS;
apdu_header[OFS_APDU_P1] = mode;
apdu_header[OFS_APDU_P2] = 0x00;
apdu_header[OFS_APDU_LEN] = 0x00;
short cmdLen = buildAtCsim((char *)buf, chan, (char *)apdu_header, NULL, 0);
atCommand((char *)buf, cmdLen);
short respLen = atResponse((char *)buf);
if (mode == APDU_GET_DATA_MODE_DATA) {
// analyze response
char * ptr;
ptr = strstr((const char *)buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response");
return RES_INVALID_CSIM_RESPONSE;
}
// expected response: 4,"61xx"
if ((ptr[LEN_MODEM_CSIM - 1] == '4') &&
(ptr[LEN_MODEM_CSIM + 0] == ',') &&
(ptr[LEN_MODEM_CSIM + 1] == '"') &&
(ptr[LEN_MODEM_CSIM + 2] == '6') &&
(ptr[LEN_MODEM_CSIM + 3] == '1')) {
bh = hex2val(ptr[LEN_MODEM_CSIM + 4]);
bl = hex2val(ptr[LEN_MODEM_CSIM + 5]);
if ((bh == -1) || (bl == -1)) {
Serial.println("Invalid response for GET DATA (Data)");
return RES_INVALID_GET_DATA_RESPONSE;
}
unsigned char len = (unsigned char)((bh << 4) | bl);
Serial.print("expected data length: ");
Serial.println(len, HEX);
apdu_header[OFS_APDU_CLA] = APDU_ISO_CLA;
apdu_header[OFS_APDU_INS] = APDU_GET_RESPONSE_INS;
apdu_header[OFS_APDU_P1] = 0x00;
apdu_header[OFS_APDU_P2] = 0x00;
apdu_header[OFS_APDU_LEN] = len;
cmdLen = buildAtCsim((char *)buf, chan, (char *)apdu_header, NULL, len);
atCommand((char *)buf, cmdLen);
respLen = atResponse((char *)buf);
logData((char *)buf, respLen);
ptr = strstr((const char *)buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response (GR)");
return RES_INVALID_CSIM_RESPONSE;
}
}
short hlen = 0;
short ofs = LEN_MODEM_CSIM - 1;
char b;
do {
b = ptr[ofs++] - 0x30;
if ((b < 0) || (b > 9)) {
Serial.println("CSIM not detected in the response (GR)");
return RES_INVALID_CSIM_RESPONSE;
}
hlen *= 10; // shift left for 1 tetrade
hlen += b;
} while (ptr[ofs] != ',');
// skip ',' and '"'
ofs += 2;
hlen >>= 1; // number of bytes
hlen -= 2; // exclude SW
Serial.print("received:");
Serial.println(hlen);
for (short ii=0; ii<hlen; ii++) {
bh = hex2val(ptr[ofs]);
bl = hex2val(ptr[ofs + 1]);
if ((bh == -1) || (bl == -1)) {
Serial.print("Invalid charcters in the response (GR): ");
return RES_INVALID_CSIM_RESPONSE;
}
ofs += 2;
buf[ii] = (unsigned char)((bh << 4) | bl);
}
buf[hlen] = 0;
// re-assign response length
respLen = hlen;
}
logData((char *)buf, respLen);
Serial.println();
*len = respLen;
return RES_OK;
}
char hex2val(char h) {
for (char i=0; i<LEN_HEX; i++) {
if (HEX_CONVERSION[i] == h) {
return i;
}
}
return -1;
}
unsigned short chars2short(char * buf) {
unsigned char b;
unsigned short w = 0;
for (char i=0; i<4; i++) {
b = hex2val(buf[i]);
//Serial.print(b);
if (b < 0) {
return -1;
}
w <<= 4;
w += b;
}
return w;
}
char simGetStatus(char chan, char mode, unsigned char * buf, short * stat, short * data_len) {
// PUT DATA (from dataBuffer)
apdu_header[OFS_APDU_CLA] = APDU_ISO_CLA;
apdu_header[OFS_APDU_INS] = APDU_GET_STATUS_INS;
apdu_header[OFS_APDU_P1] = mode;
apdu_header[OFS_APDU_P2] = 0x00;
apdu_header[OFS_APDU_LEN] = 0x00;
short cmdLen = buildAtCsim((char *)buf, chan, (char *)apdu_header, NULL, 0);
atCommand((char *)buf, cmdLen);
short respLen = atResponse((char *)buf);
logData((char *)buf, respLen);
// analyze response
char * ptr;
ptr = strstr((const char *)buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response (GS)");
return RES_INVALID_CSIM_RESPONSE;
}
// expected response: 4,"6104"
if ((ptr[LEN_MODEM_CSIM - 1] == '4') &&
(ptr[LEN_MODEM_CSIM + 0] == ',') &&
(ptr[LEN_MODEM_CSIM + 1] == '"') &&
(ptr[LEN_MODEM_CSIM + 2] == '6') &&
(ptr[LEN_MODEM_CSIM + 3] == '1') &&
(ptr[LEN_MODEM_CSIM + 4] == '0') &&
(ptr[LEN_MODEM_CSIM + 5] == '4')) {
apdu_header[OFS_APDU_CLA] = APDU_ISO_CLA;
apdu_header[OFS_APDU_INS] = APDU_GET_RESPONSE_INS;
apdu_header[OFS_APDU_P1] = 0x00;
apdu_header[OFS_APDU_P2] = 0x00;
apdu_header[OFS_APDU_LEN] = APDU_GET_STATUS_LEN_GET;
cmdLen = buildAtCsim((char *)buf, chan, (char *)apdu_header, NULL, APDU_GET_STATUS_LEN_GET);
atCommand((char *)buf, cmdLen);
respLen = atResponse((char *)buf);
logData((char *)buf, respLen);
ptr = strstr((const char *)buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response (GR)");
return RES_INVALID_CSIM_RESPONSE;
}
}
// expected response: [receiveStatus:2][receiveLength:2][SW:2] => 12 chars
if ((ptr[LEN_MODEM_CSIM - 1] != '1') ||
(ptr[LEN_MODEM_CSIM + 0] != '2') ||
(ptr[LEN_MODEM_CSIM + 1] != ',') ||
(ptr[LEN_MODEM_CSIM + 2] != '"')) {
Serial.println("Unexpected response for GET STATUS (Receive)");
return RES_UNEXPECTED_GET_STATUS_RESPONSE;
}
// extract status & length
//Serial.println("status");
short wStatus = chars2short(&ptr[LEN_MODEM_CSIM + 3]);
if (wStatus < 0) {
Serial.println("Invalid response for GET STATUS (Receive)");
return RES_INVALID_GET_STATUS_RESPONSE;
}
//Serial.println("length");
short wLength = chars2short(&ptr[LEN_MODEM_CSIM + 3 + 4]);
if (wLength < 0) {
Serial.println("Invalid response for GET STATUS (Receive)");
return RES_INVALID_GET_STATUS_RESPONSE;
}
//Serial.println();
*stat = wStatus;
*data_len = wLength;
return RES_OK;
}
char send(unsigned char tag, unsigned char * dataPtr, short dataLen) {
short cmdLen = 0;
short respLen = 0;
char chan = 0;
// put AT SIM command: Open Supplementary Logical Channel
cmdLen = buildAtCsim((char *)buf, 0, (char *)APDU_MANAGE_CHANNEL, NULL, 1);
atCommand((char *)buf, cmdLen);
respLen = atResponse((char *)buf);
logData((char *)buf, respLen);
// analyze response
char * ptr;
ptr = strstr((const char *)buf, MODEM_CSIM);
if (ptr == NULL) {
Serial.println("CSIM not detected in the response");
return RES_INVALID_CSIM_RESPONSE;
}
if ((ptr[LEN_MODEM_CSIM - 1] != '6') ||
(ptr[LEN_MODEM_CSIM + 0] != ',') ||
(ptr[LEN_MODEM_CSIM + 1] != '"') ||
(ptr[LEN_MODEM_CSIM + 2] != '0')) {
Serial.println("Unexpected response for MANAGE CHANNEL");
return RES_INVALID_OPEN_CHANNEL_RESPONSE;
}
// extract channel ID
chan = ptr[LEN_MODEM_CSIM + 3] - '0';
if ((chan <= 0) || (chan >= 4)) {
Serial.print("Unexpected response (chan ID) for MANAGE CHANNEL: ");
Serial.println(chan);
return RES_INVALID_CHANNEL_ID;
}
// SELECT (by AID) SAFE2
cmdLen = buildAtCsim((char *)buf, chan, (char *)APDU_SELECT, (char *)AID_SAFE2, LEN_AID_SAFE2);
atCommand((char *)buf, cmdLen);
respLen = atResponse((char *)buf);
logData((char *)buf, respLen);
// PUT DATA (from dataBuffer)
char apdu_header[LEN_APDU_HEADER];
apdu_header[OFS_APDU_CLA] = APDU_ISO_CLA;
apdu_header[OFS_APDU_INS] = APDU_PUT_DATA_INS;
apdu_header[OFS_APDU_P1] = APDU_PUT_DATA_P1;
apdu_header[OFS_APDU_P2] = tag;
apdu_header[OFS_APDU_LEN] = 0x00;
cmdLen = buildAtCsim(buf, chan, (char *)apdu_header, (char *)dataPtr, dataLen);
atCommand(buf, cmdLen);
respLen = atResponse(buf);
logData(buf, respLen);
// close supplementary logical channel
memcpy(apdu_header, APDU_MANAGE_CHANNEL, LEN_APDU_HEADER);
apdu_header[OFS_APDU_P1] = MODE_CHANNEL_CLOSE;
apdu_header[OFS_APDU_P2] = chan;
cmdLen = buildAtCsim(buf, 0, apdu_header, NULL, 0);
atCommand(buf, cmdLen);
respLen = atResponse(buf);
logData(buf, respLen);
return RES_OK;
}
#define LEN_NAME_CONTROL_LED 9
const char NAME_CONTROL_LED[LEN_NAME_CONTROL_LED] = { 'i', 'o', 't', ':', 'A', 'l', 'a', 'r', 'm' };
#define LEN_NAME_EFFECT_ON 2
const char NAME_EFFECT_ON[LEN_NAME_EFFECT_ON] = { 'O', 'n' };
char configParseApply(const char * buf, short dataLen) {
DeserializationError error = deserializeJson(cfg, buf, dataLen);
if (error) {
Serial.print(F("deserializeJson() failed: "));
Serial.println(error.f_str());
return RES_JSON_DESERIALIZATION_FAILED;
}
const char* cfg_version = cfg["configuration"]["version"]; // "2020-10-13"
Serial.print("configuration version: ");
Serial.println(cfg_version);
const char* cfg_config_0_action = cfg["configuration"]["config"][0]["action"]; // "iot:Alarm"
const char* cfg_config_0_effect = cfg["configuration"]["config"][0]["effect"]; // "On"
if (memcmp(cfg_config_0_action, NAME_CONTROL_LED, LEN_NAME_CONTROL_LED) == 0) {
if (memcmp(cfg_config_0_effect, NAME_EFFECT_ON, LEN_NAME_EFFECT_ON) == 0) {
Serial.println("iot:Alarm configured as ON");
digitalWrite(PIN_LED, HIGH);
} else {
Serial.println("iot:Alarm configured as OFF");
digitalWrite(PIN_LED, LOW);
}
}
}
void setup() {
// initialize digital pin LED (#7) as an output
pinMode(PIN_LED, OUTPUT);
// reset the ublox module
pinMode(GSM_RESETN, OUTPUT);
digitalWrite(GSM_RESETN, HIGH);
delay(100);
digitalWrite(GSM_RESETN, LOW);
delay(300);
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect
}
Serial.println("MKR AT");
// put Device ID
short sz = 0;
for (short i=0; i<UniqueIDsize; i++) {
hexPut(UniqueID[i], &buf[sz]);
sz += 2;
}
logData(buf, sz);
Serial.println();
// initialize modem AT interface
SerialGSM.begin(9600);
regFlag = false;
char ready = 0;
unsigned char b = 0;
unsigned char pos = 0;
do {
// put AT command
logData((char *)MODEM_AT, LEN_MODEM_AT);
SerialGSM.write(MODEM_AT, LEN_MODEM_AT);
delay(100);
// modem could not respond during initialization
if (SerialGSM.available()) {
ready = 1;
while (SerialGSM.available()) {
b = SerialGSM.read();
Serial.write(b);
delay(10);
}
}
delay(300);
} while (ready == 0);
unsigned char cntr = 0;
while (cntr < TECHNOLOGY_INIT_WAITING) {
// wait for a half of a second
delay(500);
// put AT command
logData((char *)MODEM_AT_CREG, LEN_MODEM_AT_CREG);
atCommand((char *)MODEM_AT_CREG, LEN_MODEM_AT_CREG);
// read AT response
pos = atResponse(buf);
// analyze response
char * ptr;
ptr = strstr(buf, MODEM_CREG);
if (ptr != NULL) {
regFlag = registered(&ptr[LEN_MODEM_CREG + 1]);
Serial.write(ptr[LEN_MODEM_CREG - 1]);
Serial.write(':');
Serial.write(ptr[LEN_MODEM_CREG + 1]);
Serial.println();
} else {
Serial.println("not found `+CREG`");
}
if (regFlag) {
cntr++;
}
Serial.print("cntr: ");
Serial.println(cntr);
// wait 1 sec before repeat
delay(1000);
}
Serial.println("setup finished");
// put Device ID
short idLen = UniqueIDsize;
if (idLen > LEN_DEVICE_ID_MAX) {
idLen = LEN_DEVICE_ID_MAX;
}
memcpy(id, (void *)UniqueID, idLen);
char res = send(TAG_DEVICE_ID, &id[0], idLen);
if (res == RES_OK) {
Serial.println("Set Device ID: OK");
} else {
Serial.println("Set Device ID: ERROR");
}
gState = STATE_READY;
}
void loop() {
unsigned char secs;
short dataLen = 0;
short receiveState, receiveRes;
char rv;
if (gState == STATE_READY) {
rv = simChannelOpen(&gChan);
if (rv == RES_OK) {
rv = simSelectSafe2(gChan);
}
if (rv == RES_OK) {
rv = simGetData(gChan, (char)APDU_GET_DATA_MODE_REQUEST, (unsigned char *)buf, &dataLen);
}
if (rv == RES_OK) {
gState = STATE_REQUEST_SENT;
} else {
gState = STATE_DONE;
}
}
if (gState == STATE_REQUEST_SENT) {
for (secs=0; secs < 15; secs++) {
delay(1000);
}
rv = simGetStatus(gChan, APDU_GET_STATUS_MODE_GET, (unsigned char *)buf, &receiveState, &receiveRes);
Serial.print("receiving state: ");
Serial.println(receiveState, HEX);
if (receiveState == STATUS_RECEIVE_DATA) {
gState = STATE_REQUEST_DATA;
return;
}
if (receiveState == STATUS_RECEIVE_DONE) {
if (receiveRes != 0) {
Serial.print("receiving error: ");
Serial.println(receiveRes, HEX);
gState = STATE_DONE;
return;
}
}
if (rv != RES_OK) {
gState = STATE_DONE;
}
return;
}
if (gState == STATE_REQUEST_DATA) {
rv = simGetData(gChan, APDU_GET_DATA_MODE_DATA, (unsigned char *)buf, &dataLen);
if (rv == RES_OK) {
rv = configParseApply(buf, dataLen);
}
gState = STATE_DONE;
}
if (gState == STATE_DONE) {
simChannelClose(gChan);
gState = STATE_READY;
Serial.print("waiting");
unsigned char minutes = 5;
while (minutes > 0) {
for (secs=0; secs < 60; secs++) {
delay(1000);
}
minutes -= 1;
Serial.print('.');
}
Serial.println();
return;
}
}










{kind=link}
Comments