


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
I've been playing with RC toys for a very long time now. I recently started with electric airplanes. With nitro powered planes it was easy to tell when they are tuned well. You can hear it.
These little ducted fans really don't lend themselves to tuning by ear...
I decided to make a simple Dyno.
Step 1: The Load Cell AmplifierThe first thing was to get a load cell and matching amplifier board. These are plentiful on ebay.
I used the HX711 24Bit load cell amplifier and ADC. I printed a small case to protect the amplifier board.
Step 2: The Load CellI used a short piece of aluminum angle iron to mount the cell. Then I attached some picture hanging wire to the free end.
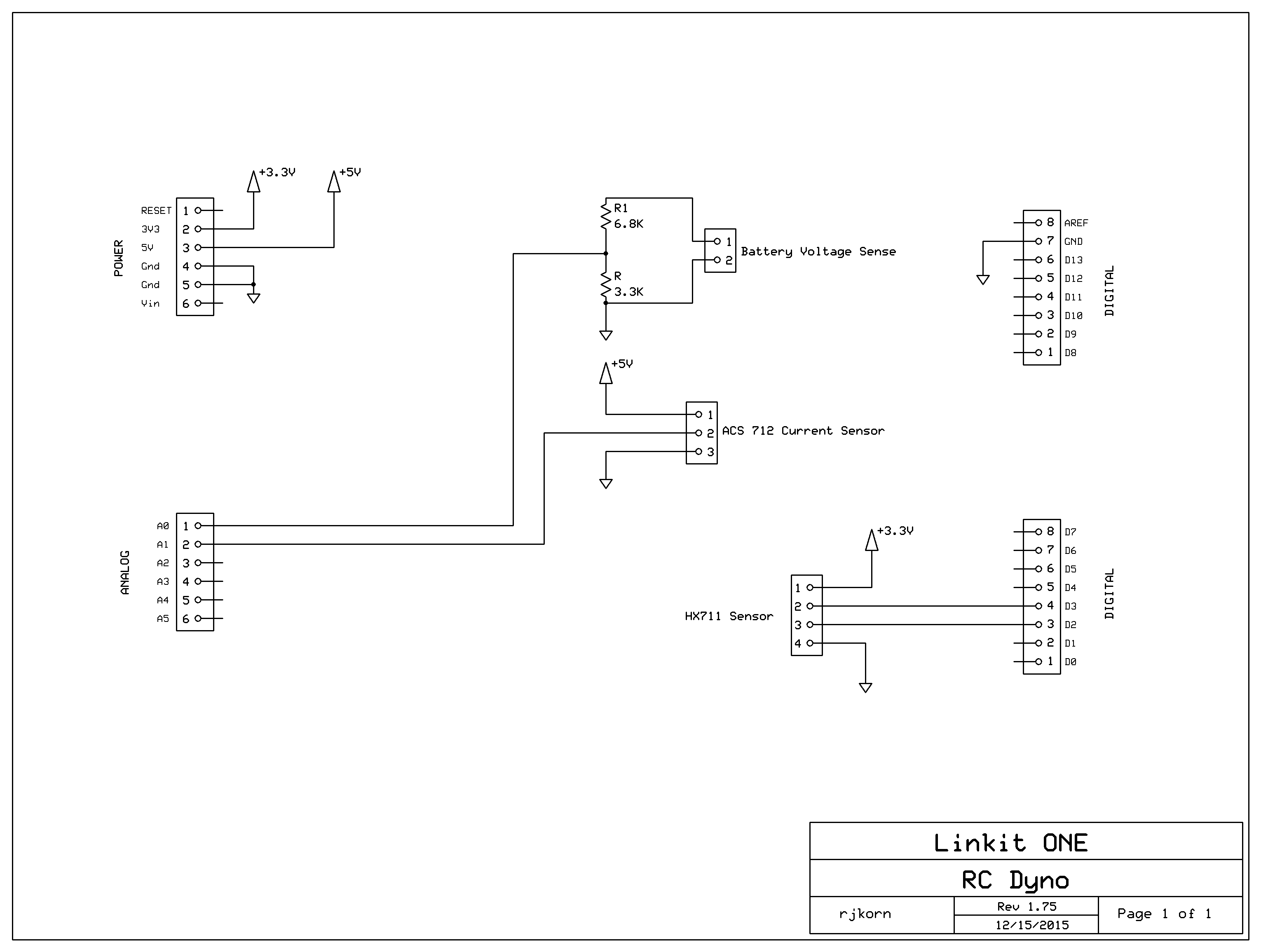
Step 3: Voltage and Current SensorI made a tee fitting to go between the battery pack and the plane. This allows me to measure the battery voltage and current under load. I used an ACS 712 30A hall effect current sensor to measure the current and a simple voltage divider connected to an Analog pin to measure the pack voltage.
Step 4: Testing Different Motors and PropsI like to test different motors and props and will make a simple sled for this.It would be nice to have a tachometer sensor too. I guess that's for V2.
Step 5: Mounting it all upI started with an Arduino mini. I used a piece of laminate flooring to mount all the parts to. I also added a small ESP wifi transmitter to replace the USB cable. It never worked as well as I had hoped. That's when I tried the Linkit One. It's built in Bluetooth SPP seemed a natural choice. I could have used WiFi too.
I already had the linkit mounted on a plate so affixing it was easy. I used the 4 thumb screws that come with these Turtlebot plates. I had to add a couple of rubber feet to make it stable and keep those thumb screws from hitting the table.
Step 6: Radio or Servo TesterSometimes its easier to use a servo tester to run the motors. The final testing should still be done with the actual radio you plan to fly with installed. That way you know you will be hitting full throttle.
Speaking of throttle I want to make a servo tester with a big pistol grip joystick like real Engine Dyno's use for throttle......
Step 7: Schematic and CodeWiring it up is pretty simple. The code is even easier. It just send 3 values separated by commas. Thrust, Voltage, Current. I had milliseconds in there too but it didn't seem to be needed. I let Maker Plot do all the hard work.
I particularly like using its Klaxon alarm for over-current and under-voltage conditions....
Step 8: Testing and CalibrationIf you're using the USB serial sketch just start the Arduino Ide serial monitor. If you are using the Bluetooth sketch you will first have to pair with your Linkit's Bluetooth Serial port. Power up the Linikit and then search for Bluetooth devices. You should see one named RC_Dyno. Just click "pair" there is no password. Now you will have a new choice under ports in the Arduino IDE also called RC_Dyno. As you can see from the screen caps there is no different in the data from either port.
To calibrate the Voltage and Current readings just comment out the "map" commands to see the raw readings. For the current sensor I used a static load, in this case a car tail light. A typical 1156 draws almost 3A when you tie both filaments together. Do that for 6 bulbs and you get a 15A draw and some nice heat... Voltage is done the same way.
To calibrate the thrust I used a luggage scale to weigh a car alternator bracket. I then hung that bracket from the pull wire on the load cell. I took the raw reading divided it by the weight in grams of the bracket. I used that as a divisor in the scale factor. I then removed the bracket and too the new reading as the tare weight. I subtracted that from the reading to get the final result. A better way is to read the tare weight at each boot up or have a Zero/Tare button that sets it on demand. But I'm not that picky.
Step 9: First Dyno RunsSitting out in the garage waiting for some attention are these two ducted fans. One has a single fan the other has two.
There are two Videos here. One is a park flyer prop plane. The other is the dual ducted fan with one motor screeching from bad bearings.
Guess which is which.....
Step 10: Future EnhancementsI have these encased Dallas 18B20 temperature sensors. I like to add a few for battery, motor, and ESC temperature readings.
A motor tachometer or two would be nice.
Maybe a DHT11 for ambient temperature and humidity readings....
To go really overkill maybe add the Pulse Width reading on the signal to the ESC.


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments