

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
When looking at the GPS sentence structure is said "Speed over ground, Knots" and I immediately thought Boat....
This could easily be adapted to any other use even that ATV or power wheels jeep!
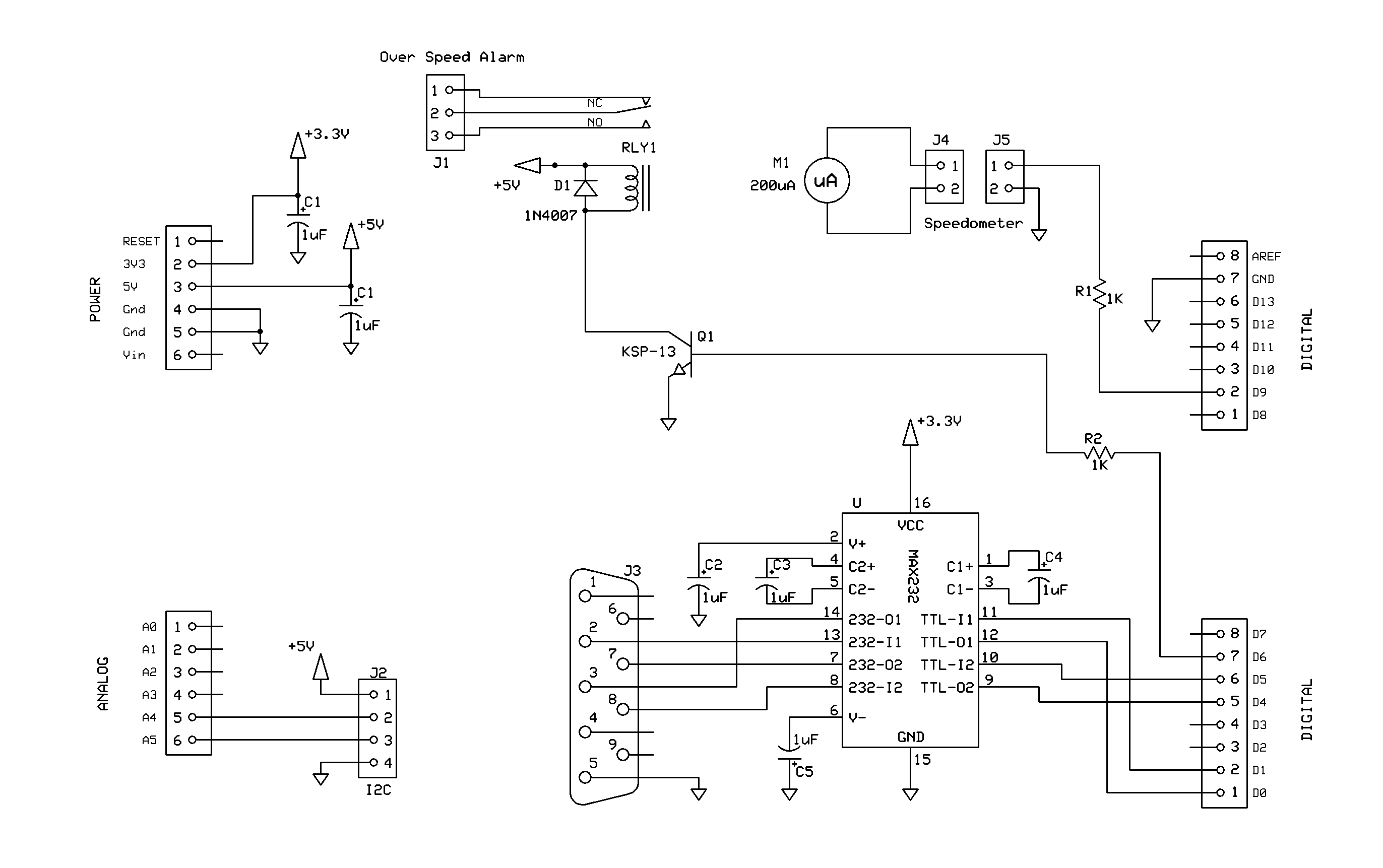
Step 1: Schematic and CodeAll you really need is a 1K resistor on the PWM out pin connected to an analog meter movement. Or better yet a 5K pot. I don't like pots because they drift from vibration but it would make it easier to calibrate the meter.
I usually like to adjust the resistor so a value of 240 gives full scale deflection. This way you can "pin" the needle....
I added a relay for an over speed alarm and a serial port to echo the raw GPS data to other devices. Might as well use it......
Step 2: The ShieldThe shield is pretty straight forward. Almost verbatim from the data sheet for the Max232 chip.
I used a KSP-13 Darlington since I have dozens left over from other projects. You could probably get away with a 2N2222 but the Linkit One has a 1mA output limit so I like the extra gain.
Step 3: The MeterThis can be a hard choice. I prefer older or obscure analog meters.
I chose this great edge view meter I got at a surplus house.
Its only 200uA for full scale so no amplifier needed from the Linkit One's PWM output.
Step 4: Power SupplyI used a commercial USB car charger adapter module. This is overkill but you can tap off it for other devices.
If you get one of these shorty USB cables you can connect the Linkit One without any soldering. Just make sure you get the right one or you'll have leftovers too.
Step 5: HousingFor an enclosure I used an old Wall Wart box. This also came form a surplus house. It was never used but got pretty discolored after years in the drawer.
All the power components fit in the bottom. A spacer keeps the Linkit from touching anything. Its a tight fit so no mounting bolts just a little foam rubber will do it.
First time around I tried using a coax power jack. BIG MISTAKE. They fall out easily on bumps as found out in my car. Its worse on choppy waters. Use aviation connectors and you'll be much happier. The 4 pin is for power in and meter out. The 7 pin handles serial data and alarm contacts.
Step 6: AlarmAudible alarms probably wouldn't do me much good. You can use red 12V pilot lights like these. I went for the BIG Jeweled indicators to match my meter's age.
Step 7: Waiting for a Trial RunIt's done and waiting for it's maiden voyage. I may make a smaller version for my golf cart.
{kind=link}

Comments