#include <LiquidCrystal.h>
#include <Keypad.h>
LiquidCrystal lcd(A0,A1,A2,A3,A4,A5);
bool doInitializeLCD = true;
//construct keypad
const byte ROWS = 4; //four rows
const byte COLS = 4; //four columns
//define the symbols on the buttons of the keypads
char hexaKeys[ROWS][COLS] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
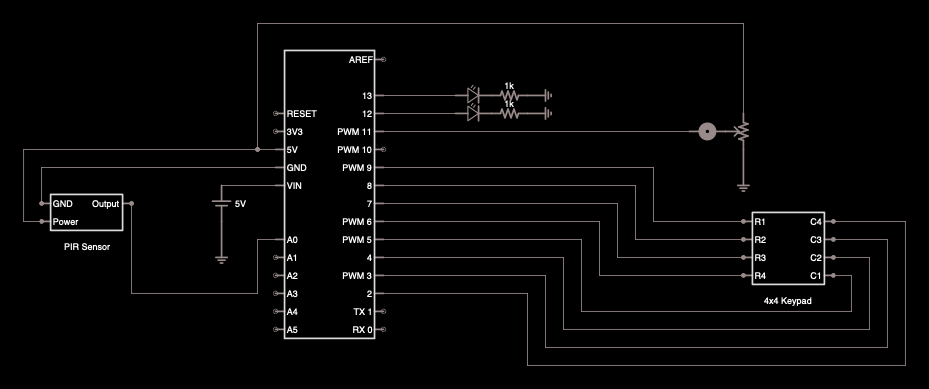
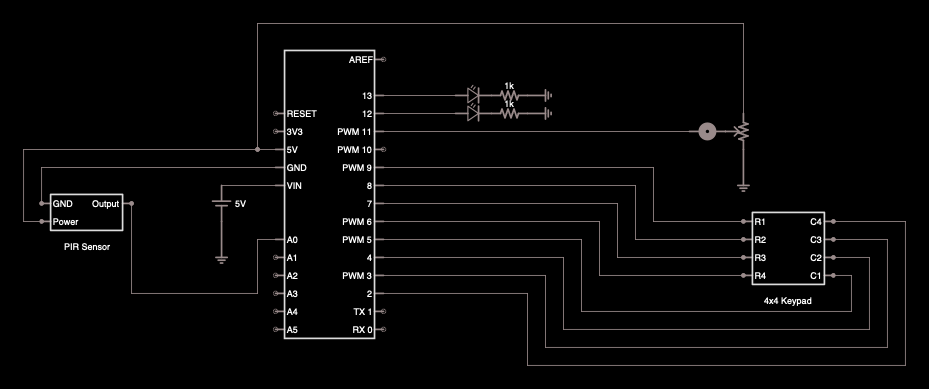
byte rowPins[ROWS] = {9, 8, 7, 6}; //connect to the row pinouts of the keypad
byte colPins[COLS] = {5, 4, 3, 2}; //connect to the column pinouts of the keypad
//create object of Keypad class
Keypad customKeypad = Keypad( makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
char customKey;
char accessCode[] = "1234";
char keyPadInput[] = "zzzz";
unsigned char inputCounter = 0;
unsigned char inputMaxCount = 4;
int alertledPin = 11; // LED on Pin 11, lights up when PIR is active
int powerledPin = 13; // LED on Pin 13, indicates power on, always HIGH
int pirPin = 23; // Input for HC-S501
int pirValue = 0; // Place to store read PIR Value
int buzzer = 12;//the pin of the active buzzer
boolean IsAlerting = false;
//create armed states
enum ArmedStates {ARMED, DISARMED};
ArmedStates armedState = DISARMED;
short armedTimerInterval = 5;
unsigned long armedTimer = millis();
bool debug = false;
void setup() {
Serial.begin(9600);
while (!Serial); // wait for Serial to connect
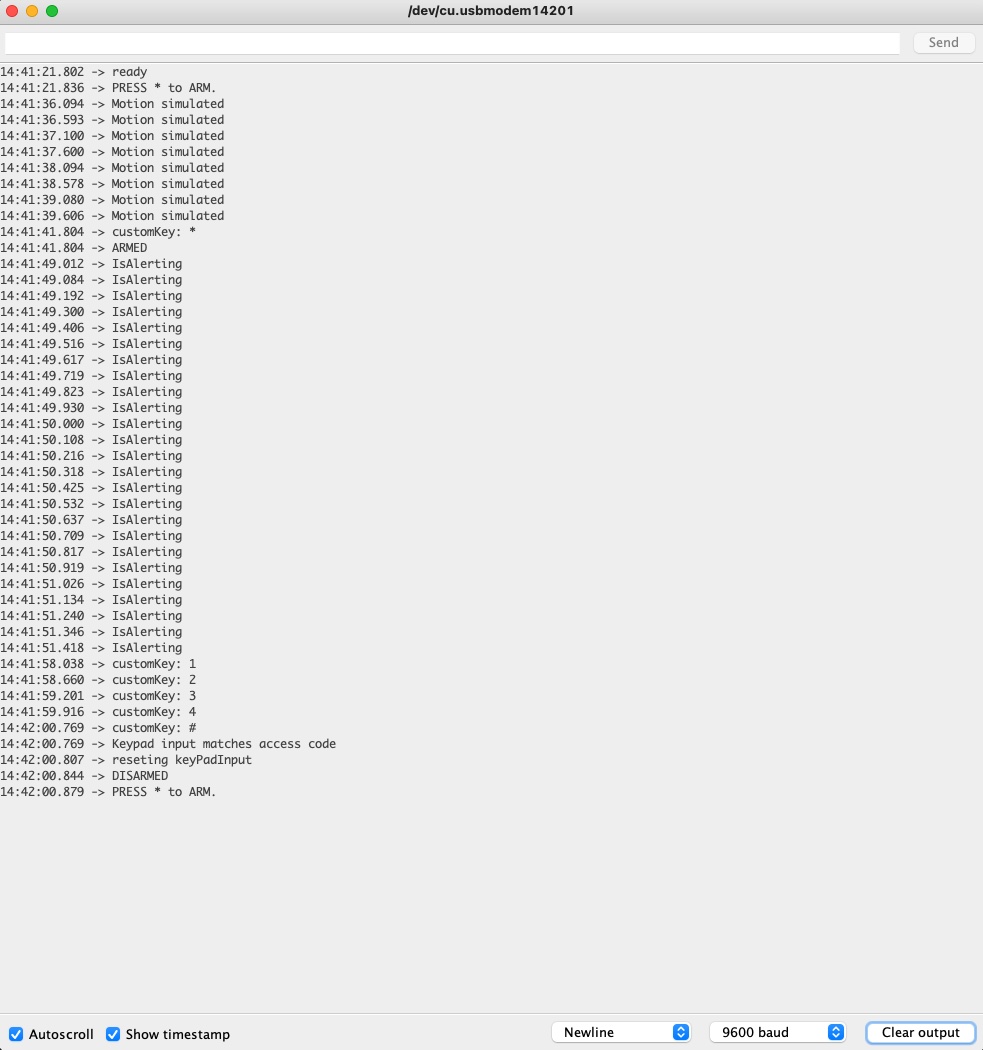
Serial.println("ready");
pinMode(buzzer, OUTPUT); // set up pin as output
pinMode(alertledPin, OUTPUT); // set up pin as output
pinMode(powerledPin, OUTPUT); // set pin as output
pinMode(pirPin, INPUT); // set pin as input
lcd.begin(16, 2); // set up and register the LCD
}
void loop() {
digitalWrite(powerledPin, HIGH);
initializeLCD();
handleKeyPadInput();
handlePIR();
alert();
}
const char* getStateString(enum ArmedStates armedState) {
switch (armedState)
{
case ARMED: return "ARMED";
case DISARMED: return "DISARMED";
delay(100);
}
}
//
void initializeLCD() {
if (doInitializeLCD) {
doInitializeLCD = false;
lcd.clear();
String a = getStateString(armedState);
if (debug) {
Serial.println("armedState: " + a);
}
lcd.setCursor(0, 0);
lcd.print(a);
lcd.setCursor(0, 1);
lcd.print("PRESS * to ARM.");
Serial.println("PRESS * to ARM.");
//delay(1);
}
}
void handleLCD(bool shouldClearLCD) {
if (shouldClearLCD) {
lcd.clear();
}
String a = getStateString(armedState);
if (debug) {
Serial.println("armedState: " + a);
}
lcd.setCursor(0, 0);
lcd.print(a);
lcd.setCursor(0, 1);
lcd.print("DISARM KEY:");
uint8_t cursorStart = 11;
lcd.setCursor(cursorStart, 1);
lcd.cursor();
// overwrites the LCD screen positions with blank space or keypad input
for (int i = 0; i < 4; i++) {
if (keyPadInput[i] == 'z') {
lcd.setCursor(cursorStart + i, 1);
lcd.print(" ");
} else {
lcd.setCursor(cursorStart + i, 1);
lcd.print(keyPadInput[i]);
}
}
}
void handleKeyPadInput() {
customKey = customKeypad.getKey();
if (customKey) {
Serial.print("customKey: ");
Serial.println(customKey);
if (armedState == DISARMED ) {
if (customKey == '*') {
armedState = ARMED;
Serial.print("ARMED\n");
handleLCD(true);
}
} else {
if (customKey == '*') {
resetCodeInput();
} else if (customKey == '#') {
if (strcmp(keyPadInput, accessCode) == 0 ) {
Serial.println("Keypad input matches access code");
// Disarm the system
resetCodeInput();
armedState = DISARMED;
Serial.print("DISARMED\n");
delay(100);
doInitializeLCD = true;
initializeLCD();
} else {
resetCodeInput();
}
} else {
if (inputCounter <= 3) {
keyPadInput[inputCounter] = customKey;
inputCounter++;
handleLCD(true);
}
}
}
}
}
void resetCodeInput() {
Serial.println("reseting keyPadInput");
for (int i = 0; i < 4; i++) {
keyPadInput[i] = 'z';
}
inputCounter = 0;
handleLCD(true);
}
void handlePIR(){
pirValue = digitalRead(pirPin);
if(pirValue > 0 && armedState == DISARMED){
Serial.println("Motion simulated");
delay(500);
digitalWrite(pirPin, LOW);
}
}
void alert() {
if (pirValue > 0 && armedState == ARMED ){
IsAlerting = true;
Serial.println("IsAlerting");
}
else{
IsAlerting = false;
}
handleLed();
handleBuzz();
}
void handleLed () {
// turn on alarm LED
if (IsAlerting) {
digitalWrite(alertledPin, HIGH);
}
else {
digitalWrite(alertledPin, LOW);
}
}
void handleBuzz() {
if (IsAlerting) {
unsigned char i;
for (i = 0; i < 10; i++){
digitalWrite(buzzer, HIGH);
delay(1);//wait for 1ms
digitalWrite(buzzer, LOW);
delay(1);//wait for 1ms
}
//switch frequency
for (i = 0; i < 20; i++){
digitalWrite(buzzer, HIGH);
delay(2);//wait for 2ms
digitalWrite(buzzer, LOW);
delay(2);//wait for 2ms
}
}
}















{kind=link}
{kind=link}
{kind=link}
Comments