



Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
The Motion Sensor Smart Key is a keyless door lock system that is surprisingly convenient. This system allows users to lock/unlock household doors, without the need for a common key. With this technology, one will never have to worry about losing his/her keys again.
The concept of this project was chosen because of its obtainability and the practical use it would have for any household. The project was an ideal beginning project that did not exceed the team's resources or experience with particle photons; it was a challenging, yet, reachable goal. Furthermore, the system would be very practical in every household and one would never lose a set of keys again.
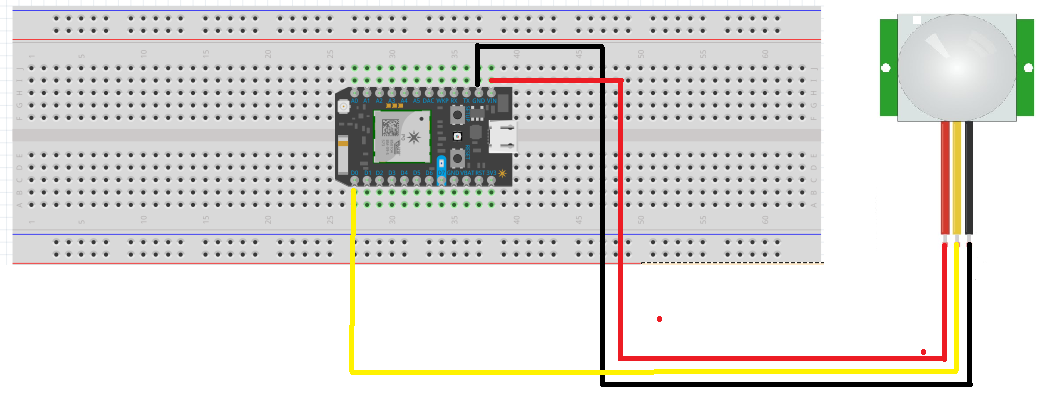
The system consists of two particle photons, one containing a generic servo motor and the other containing a PIR motion sensor. The photon housing the motion sensor is used as a publisher. When the sensor has detected nearby motion, the publishing photon will send the code listed below to the cloud. Then, the subscribing photon will seize the published information, triggering the servo motor. The motor will turn approximately 110 degrees and pause for a short period of time, before reversing its rotation back to the original position.
The shaft of the servo motor is attached to the deadbolt of household door. When the motion sensor has been triggered, the servo motor will be engaged, turning the deadbolt approximately 110 degrees to unlock the door. Then, after a set amount of time has passed, the servo motor will reverse direction and lock the door behind the person.
Below, is an image of the publishing photon and the attached PIR sensor.
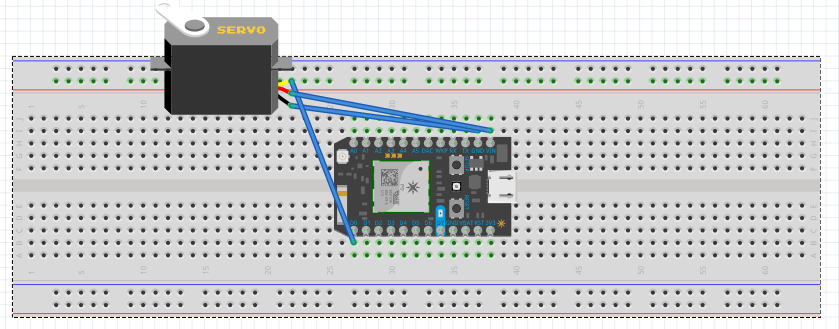
Below, is an image of the subscribing photon and the attached servo motor. It can be seen that the servo motor is held by double-sided tape and a near-rigid mount. It was very important that the mount was unable to move or else the motor rotational movement would be flawed. Needless to say, a lot of tape was used to keep the system stationary.
The plot above was generated as the motion sensor was continually publishing data to its subscribing photon. When the plot obtained a value of 1, the servo motor had rotated 110 degrees, unlocking the door. When the obtained a value of 0, the servo motor had reversed its rotation and locked the door. It can be noticed that the time was broken into almost-perfect five second intervals. This is because, as the data was being recorded, the motion sensor was constantly being activated by my partner and I.





{kind=link}
{kind=link}
Comments