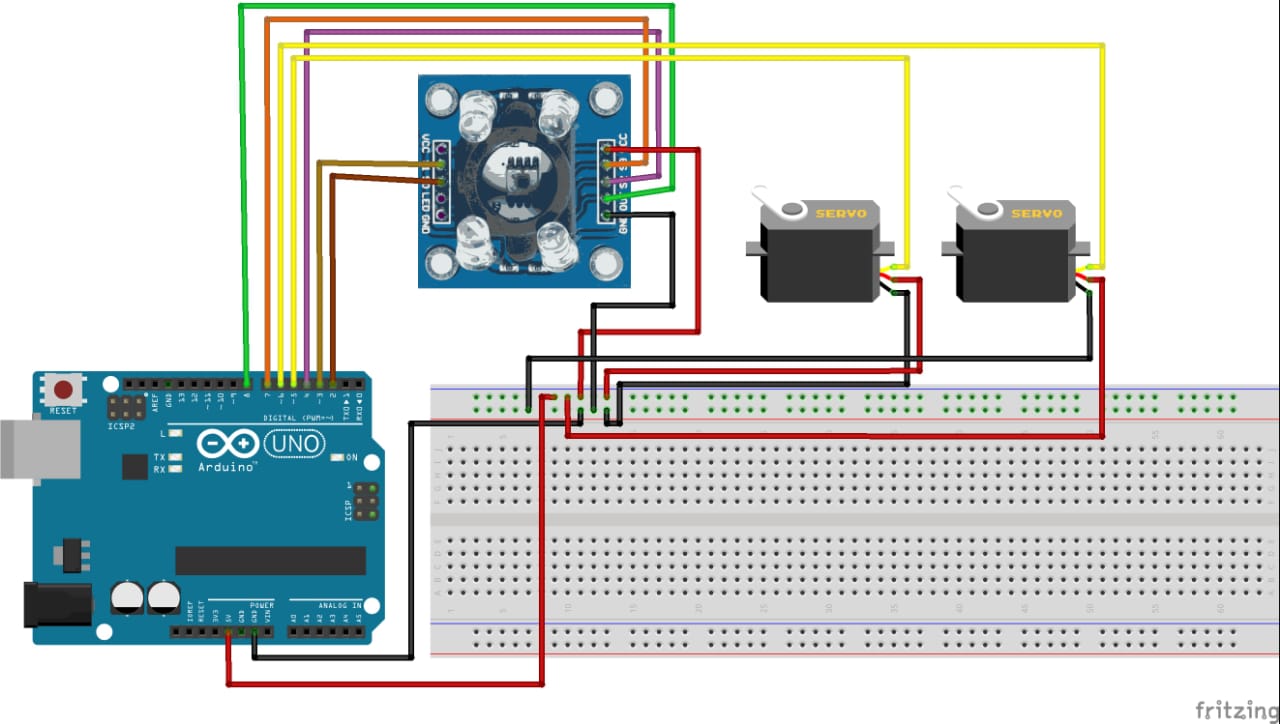
// TCS230 or TCS3200 pins wiring to Arduino
#include <Servo.h>
#define S0 2
#define S1 3
#define S2 4
#define S3 7
#define sensorOut 8
Servo myser1;
Servo myser2;
int pos = 00;
// Stores frequency read by the photodiodes
int red = 0;
int green = 0;
int blue = 0;
int benar=0, warna=0;
void setup() {
myser1.attach(5);
myser2.attach(6);
// Setting the outputs
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
// Setting the sensorOut as an input
pinMode(sensorOut, INPUT);
// Setting frequency scaling to 20%
digitalWrite(S0,HIGH);
digitalWrite(S1,LOW);
// Begins serial communication
Serial.begin(9600);
}
void loop() {
myser2.write(0); //servo2 menulis arah 0
delay(1000); //jeda 500ms
while(benar==0) //benar = 0
{
detectcolor(); //deteksi warna
posservo(); //posisi servo
delay(100); //jeda 100 ms
}
delay(200); //jeda 100 ms
myser2.write(70); //servo2 menulis 90
benar=0; //benar =0
delay(1000); //jeda 500 ms
}
//detectcolor();
void detectcolor()
{
// Setting RED (R) filtered photodiodes to be read
digitalWrite(S2,LOW);
digitalWrite(S3,LOW);
// Reading the output frequency
red = pulseIn(sensorOut, LOW);
// Printing the RED (R) value
Serial.print("R = ");
Serial.print(red);
delay(100);
// Setting GREEN (G) filtered photodiodes to be read
digitalWrite(S2,HIGH);
digitalWrite(S3,HIGH);
// Reading the output frequency
green = pulseIn(sensorOut, LOW);
// Printing the GREEN (G) value
Serial.print(" G = ");
Serial.print(green);
delay(100);
// Setting BLUE (B) filtered photodiodes to be read
digitalWrite(S2,LOW);
digitalWrite(S3,HIGH);
// Reading the output frequency
blue = pulseIn(sensorOut, LOW);
// Printing the BLUE (B) value
Serial.print(" B = ");
Serial.println(blue);
delay(100);
if(blue<60 && red<150 && green<90){ //ketentuan range RGB
warna=1; //warna =1
Serial.println("biru"); //menampilkan biru
}
else if((50<red&&red<83) && (110<green && green<150) && blue<100){ //ketentuan range RGB
warna=2; //warna 2
Serial.println("Merah");
}
else if((120<red&&red<150) && (70<green&&green<90) && (60<blue&&blue<85)){ //ketentuan range RGB
warna=3; //warna 3
Serial.println("Hijau");
}
else if((43<red && red<70) && (55<green&&green<80) && (60<blue && blue<80)){ //ketentuan range RGB
warna=4; //warna 4
Serial.println("Kuning");
}
else if((90<red && red<105) && (90<green&&green<115) && blue<55){ //ketentuan range RGB
warna=5; //warna 5
Serial.println("Ungu");
}
else
{
warna=0; //Tidak mendeteksi
Serial.println("tidak mendeteksi");
}
}
void posservo()
{
if(warna==1) //jika warna = 1
{
myser1.write(30); //myser1 menulis 30
benar=1;
}
else if(warna==2)
{
myser1.write(60);
benar=1;
}
else if(warna==3)
{
myser1.write(90);
benar=1;
}
else if(warna==4)
{
myser1.write(120);
benar=1;
}
else if(warna==5)
{
myser1.write(150);
benar=1;
}
}






_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
{kind=link}




Comments