

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
A Precession Signal generator can be made using an Arduino and DDS synthesizer (AD9850), and is the world's first and smallest portable signal generator build. You can make decent 0 -30 MHZ frequency signal generator for only 12$. If you are a pro over-clocker, then 40MHZ for the same price. AD9850 works on DDS (direct digital synthesis) which can generate analog waveforms with digital input. Here I used an Arduino Pro Mini to control the DDS board and Hitachi HD 44780 LCD display (16×2 LCD) to display current frequency and change steps. This signal generator runs on USB 5V and consumes 270 mA max! So you can install a battery pack inside it and make it a standalone system if you want. It's a great project for beginners and will give you a lot of satisfaction, as well as save you hundreds of dollars! You will need a frequency generator if you are an amateur radio guy or hobbyist or professional electronics guy.
Step 1: Get the PartsHere's the parts you will need:
- 16×2 LCD Display (Hitachi HD 44780)
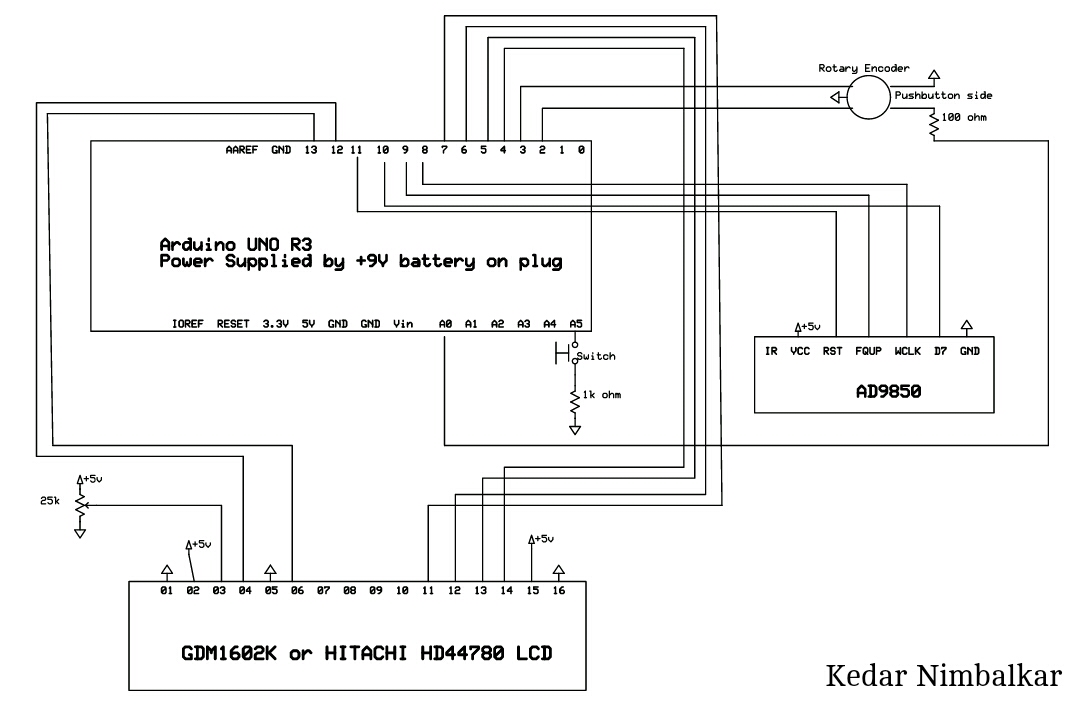
Connect all components as shown in the above schematics.
Step 3: Watch the Full TutorialThe code and schematics can found here or below this tutorial.
Step 4: Output ResponseThe output response is the output waves you get at different frequencies. Here are a few scope shots to get an idea of how well it is.
- 1MHZ
- 10MHZ
- 20 MHZ
- 30 MHZ
/*
Main code by Richard Visokey AD7C - www.ad7c.com
Revision 2.0 - November 6th, 2013
*/
// Include the library code
#include <LiquidCrystal.h>
#include <rotary.h>
#include <EEPROM.h>
//Setup some items
#define W_CLK 8 // Pin 8 - connect to AD9850 module word load clock pin (CLK)
#define FQ_UD 9 // Pin 9 - connect to freq update pin (FQ)
#define DATA 11 // Pin 11 - connect to serial data load pin (DATA)
#define RESET 10 // Pin 10 - connect to reset pin (RST)
#define pulseHigh(pin) {digitalWrite(pin, HIGH); digitalWrite(pin, LOW); }
Rotary r = Rotary(2,3); // sets the pins the rotary encoder uses. Must be interrupt pins.
LiquidCrystal lcd(12, 13, 7, 6, 5, 4); // I used an odd pin combination because I need pin 2 and 3 for the interrupts.
int_fast32_t rx=0000000; // Base (starting) frequency of VFO. This only loads once. To force load again see ForceFreq variable below.
int_fast32_t rx2=1; // variable to hold the updated frequency
int_fast32_t increment = 10; // starting VFO update increment in HZ.
int_fast32_t iffreq = 0000000; // Intermedite Frequency - Amount to subtract (-) from base frequency. ********************************************
int buttonstate = 0;
int buttonstate2 = 0;
int GoIF = 1;
String hertz = "10 Hz";
int hertzPosition = 5;
byte ones,tens,hundreds,thousands,tenthousands,hundredthousands,millions ; //Placeholders
String freq; // string to hold the frequency
int_fast32_t timepassed = millis(); // int to hold the arduino miilis since startup
int memstatus = 1; // value to notify if memory is current or old. 0=old, 1=current.
int ForceFreq = 1; // Change this to 0 after you upload and run a working sketch to activate the EEPROM memory. YOU MUST PUT THIS BACK TO 0 AND UPLOAD THE SKETCH AGAIN AFTER STARTING FREQUENCY IS SET!
void setup() {
pinMode(A0,INPUT); // Connect to a button that goes to GND on push
pinMode(A5,INPUT); // IF sense **********************************************
digitalWrite(A0,HIGH);
digitalWrite(A5,HIGH);
lcd.begin(16, 2);
PCICR |= (1 << PCIE2);
PCMSK2 |= (1 << PCINT18) | (1 << PCINT19);
sei();
pinMode(FQ_UD, OUTPUT);
pinMode(W_CLK, OUTPUT);
pinMode(DATA, OUTPUT);
pinMode(RESET, OUTPUT);
pulseHigh(RESET);
pulseHigh(W_CLK);
pulseHigh(FQ_UD); // this pulse enables serial mode on the AD9850 - Datasheet page 12.
lcd.setCursor(hertzPosition,1);
lcd.print(hertz);
// Load the stored frequency
if (ForceFreq == 0) {
freq = String(EEPROM.read(0))+String(EEPROM.read(1))+String(EEPROM.read(2))+String(EEPROM.read(3))+String(EEPROM.read(4))+String(EEPROM.read(5))+String(EEPROM.read(6));
rx = freq.toInt();
}
}
void loop() {
// Update the display and frequency if the new Freq NEQ the old Freq
if (rx != rx2){
showFreq();
sendFrequency(rx);
rx2 = rx;
}
// Rotate through the rate of tuning as you hold down the button
buttonstate = digitalRead(A0);
if(buttonstate == LOW) {
setincrement();
};
// Check for PIN low to drive IF offset Freq
buttonstate = digitalRead(A5);
if (buttonstate != buttonstate2){
if(buttonstate == LOW) {
lcd.setCursor(15,1);
lcd.print(".");
GoIF = 0;
buttonstate2 = buttonstate;
sendFrequency(rx);
}
else{
lcd.setCursor(15,1);
lcd.print(" ");
GoIF = 1;
buttonstate2 = buttonstate;
sendFrequency(rx);
};
};
// Write the frequency to memory if not stored and 2 seconds have passed since the last frequency change.
if(memstatus == 0){
if(timepassed+2000 < millis()){
storeMEM();
}
}
}
// Interrupt routine to catch the rotary encoder
ISR(PCINT2_vect) {
unsigned char result = r.process();
if (result) {
if (result == DIR_CW){rx=rx+increment;}
else {rx=rx-increment;};
if (rx >=30000000){rx=rx2;}; // UPPER VFO LIMIT
if (rx <=0000000){rx=rx2;}; // LOWER VFO LIMIT
}
}
// frequency calc from datasheet page 8 = <sys clock> * <frequency tuning word>/2^32
void sendFrequency(double frequency) {
if (GoIF == 1){frequency=frequency-iffreq;}; //If pin = low, subtract the IF frequency.
int32_t freq = frequency * 4294967295/125000000; // note 125 MHz clock on 9850. You can make 'slight' tuning variations here by adjusting the clock frequency.
for (int b=0; b<4; b++, freq>>=8) {
tfr_byte(freq & 0xFF);
}
tfr_byte(0x000); // Final control byte, all 0 for 9850 chip
pulseHigh(FQ_UD); // Done! Should see output
}
// transfers a byte, a bit at a time, LSB first to the 9850 via serial DATA line
void tfr_byte(byte data)
{
for (int i=0; i<8; i++, data>>=1) {
digitalWrite(DATA, data & 0x01);
pulseHigh(W_CLK); //after each bit sent, CLK is pulsed high
}
}
void setincrement(){
if(increment == 10){increment = 50; hertz = "50 Hz"; hertzPosition=5;}
else if (increment == 50){increment = 100; hertz = "100 Hz"; hertzPosition=4;}
else if (increment == 100){increment = 500; hertz="500 Hz"; hertzPosition=4;}
else if (increment == 500){increment = 1000; hertz="1 Khz"; hertzPosition=6;}
else if (increment == 1000){increment = 2500; hertz="2.5 Khz"; hertzPosition=4;}
else if (increment == 2500){increment = 5000; hertz="5 Khz"; hertzPosition=6;}
else if (increment == 5000){increment = 10000; hertz="10 Khz"; hertzPosition=5;}
else if (increment == 10000){increment = 100000; hertz="100 Khz"; hertzPosition=4;}
else if (increment == 100000){increment = 1000000; hertz="1 Mhz"; hertzPosition=6;}
else{increment = 10; hertz = "10 Hz"; hertzPosition=5;};
lcd.setCursor(0,1);
lcd.print(" ");
lcd.setCursor(hertzPosition,1);
lcd.print(hertz);
delay(250); // Adjust this delay to speed up/slow down the button menu scroll speed.
};
void showFreq(){
millions = int(rx/1000000);
hundredthousands = ((rx/100000)%10);
tenthousands = ((rx/10000)%10);
thousands = ((rx/1000)%10);
hundreds = ((rx/100)%10);
tens = ((rx/10)%10);
ones = ((rx/1)%10);
lcd.setCursor(0,0);
lcd.print(" ");
if (millions > 9){lcd.setCursor(1,0);}
else{lcd.setCursor(2,0);}
lcd.print(millions);
lcd.print(".");
lcd.print(hundredthousands);
lcd.print(tenthousands);
lcd.print(thousands);
lcd.print(".");
lcd.print(hundreds);
lcd.print(tens);
lcd.print(ones);
lcd.print(" Mhz ");
timepassed = millis();
memstatus = 0; // Trigger memory write
};
void storeMEM(){
//Write each frequency section to a EPROM slot. Yes, it's cheating but it works!
EEPROM.write(0,millions);
EEPROM.write(1,hundredthousands);
EEPROM.write(2,tenthousands);
EEPROM.write(3,thousands);
EEPROM.write(4,hundreds);
EEPROM.write(5,tens);
EEPROM.write(6,ones);
memstatus = 1; // Let program know memory has been written
};
/* Rotary encoder handler for arduino. v1.1
*
* Copyright 2011 Ben Buxton. Licenced under the GNU GPL Version 3.
* Contact: bb@cactii.net
*
* A typical mechanical rotary encoder emits a two bit gray code
* on 3 output pins. Every step in the output (often accompanied
* by a physical 'click') generates a specific sequence of output
* codes on the pins.
*
* There are 3 pins used for the rotary encoding - one common and
* two 'bit' pins.
*
* The following is the typical sequence of code on the output when
* moving from one step to the next:
*
* Position Bit1 Bit2
* ----------------------
* Step1 0 0
* 1/4 1 0
* 1/2 1 1
* 3/4 0 1
* Step2 0 0
*
* From this table, we can see that when moving from one 'click' to
* the next, there are 4 changes in the output code.
*
* - From an initial 0 - 0, Bit1 goes high, Bit0 stays low.
* - Then both bits are high, halfway through the step.
* - Then Bit1 goes low, but Bit2 stays high.
* - Finally at the end of the step, both bits return to 0.
*
* Detecting the direction is easy - the table simply goes in the other
* direction (read up instead of down).
*
* To decode this, we use a simple state machine. Every time the output
* code changes, it follows state, until finally a full steps worth of
* code is received (in the correct order). At the final 0-0, it returns
* a value indicating a step in one direction or the other.
*
* It's also possible to use 'half-step' mode. This just emits an event
* at both the 0-0 and 1-1 positions. This might be useful for some
* encoders where you want to detect all positions.
*
* If an invalid state happens (for example we go from '0-1' straight
* to '1-0'), the state machine resets to the start until 0-0 and the
* next valid codes occur.
*
* The biggest advantage of using a state machine over other algorithms
* is that this has inherent debounce built in. Other algorithms emit spurious
* output with switch bounce, but this one will simply flip between
* sub-states until the bounce settles, then continue along the state
* machine.
* A side effect of debounce is that fast rotations can cause steps to
* be skipped. By not requiring debounce, fast rotations can be accurately
* measured.
* Another advantage is the ability to properly handle bad state, such
* as due to EMI, etc.
* It is also a lot simpler than others - a static state table and less
* than 10 lines of logic.
*/
#include "Arduino.h"
#include "rotary.h"
/*
* The below state table has, for each state (row), the new state
* to set based on the next encoder output. From left to right in,
* the table, the encoder outputs are 00, 01, 10, 11, and the value
* in that position is the new state to set.
*/
#define R_START 0x0
#ifdef HALF_STEP
// Use the half-step state table (emits a code at 00 and 11)
#define R_CCW_BEGIN 0x1
#define R_CW_BEGIN 0x2
#define R_START_M 0x3
#define R_CW_BEGIN_M 0x4
#define R_CCW_BEGIN_M 0x5
const unsigned char ttable[6][4] = {
// R_START (00)
{R_START_M, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CCW_BEGIN
{R_START_M | DIR_CCW, R_START, R_CCW_BEGIN, R_START},
// R_CW_BEGIN
{R_START_M | DIR_CW, R_CW_BEGIN, R_START, R_START},
// R_START_M (11)
{R_START_M, R_CCW_BEGIN_M, R_CW_BEGIN_M, R_START},
// R_CW_BEGIN_M
{R_START_M, R_START_M, R_CW_BEGIN_M, R_START | DIR_CW},
// R_CCW_BEGIN_M
{R_START_M, R_CCW_BEGIN_M, R_START_M, R_START | DIR_CCW},
};
#else
// Use the full-step state table (emits a code at 00 only)
#define R_CW_FINAL 0x1
#define R_CW_BEGIN 0x2
#define R_CW_NEXT 0x3
#define R_CCW_BEGIN 0x4
#define R_CCW_FINAL 0x5
#define R_CCW_NEXT 0x6
const unsigned char ttable[7][4] = {
// R_START
{R_START, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CW_FINAL
{R_CW_NEXT, R_START, R_CW_FINAL, R_START | DIR_CW},
// R_CW_BEGIN
{R_CW_NEXT, R_CW_BEGIN, R_START, R_START},
// R_CW_NEXT
{R_CW_NEXT, R_CW_BEGIN, R_CW_FINAL, R_START},
// R_CCW_BEGIN
{R_CCW_NEXT, R_START, R_CCW_BEGIN, R_START},
// R_CCW_FINAL
{R_CCW_NEXT, R_CCW_FINAL, R_START, R_START | DIR_CCW},
// R_CCW_NEXT
{R_CCW_NEXT, R_CCW_FINAL, R_CCW_BEGIN, R_START},
};
#endif
/*
* Constructor. Each arg is the pin number for each encoder contact.
*/
Rotary::Rotary(char _pin1, char _pin2) {
// Assign variables.
pin1 = _pin1;
pin2 = _pin2;
// Set pins to input.
pinMode(pin1, INPUT);
pinMode(pin2, INPUT);
#ifdef ENABLE_PULLUPS
digitalWrite(pin1, HIGH);
digitalWrite(pin2, HIGH);
#endif
// Initialise state.
state = R_START;
}
unsigned char Rotary::process() {
// Grab state of input pins.
unsigned char pinstate = (digitalRead(pin2) << 1) | digitalRead(pin1);
// Determine new state from the pins and state table.
state = ttable[state & 0xf][pinstate];
// Return emit bits, ie the generated event.
return state & 0x30;
}
/*
* Rotary encoder library for Arduino.
*/
#ifndef rotary_h
#define rotary_h
#include "Arduino.h"
// Enable this to emit codes twice per step.
//#define HALF_STEP
// Enable weak pullups
#define ENABLE_PULLUPS
// Values returned by 'process'
// No complete step yet.
#define DIR_NONE 0x0
// Clockwise step.
#define DIR_CW 0x10
// Anti-clockwise step.
#define DIR_CCW 0x20
class Rotary
{
public:
Rotary(char, char);
// Process pin(s)
unsigned char process();
private:
unsigned char state;
unsigned char pin1;
unsigned char pin2;
};
#endif



{kind=link}
Comments