

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 20 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
The BallandBeam project was developed at the National Institute of Applied Science and Technology (INSAT) in Spring 2019.
Visit my personal portfolio: karembenchikha.me
Check the Project on GitHub: https://github.com/KaremBenChikha/BallandBeam
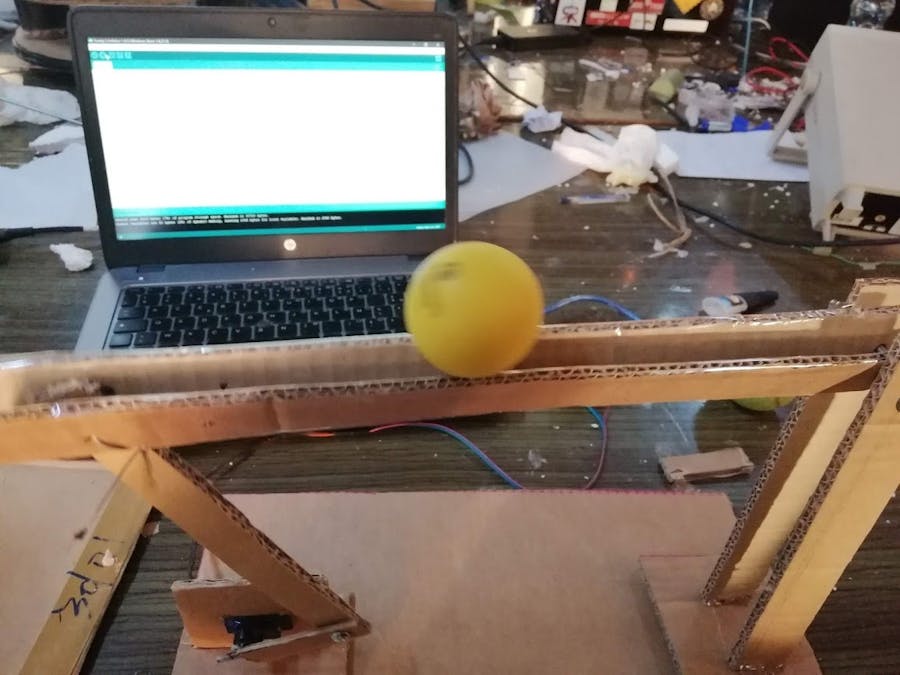
This was a school project. The assignment was to construct a ball and beam control system.
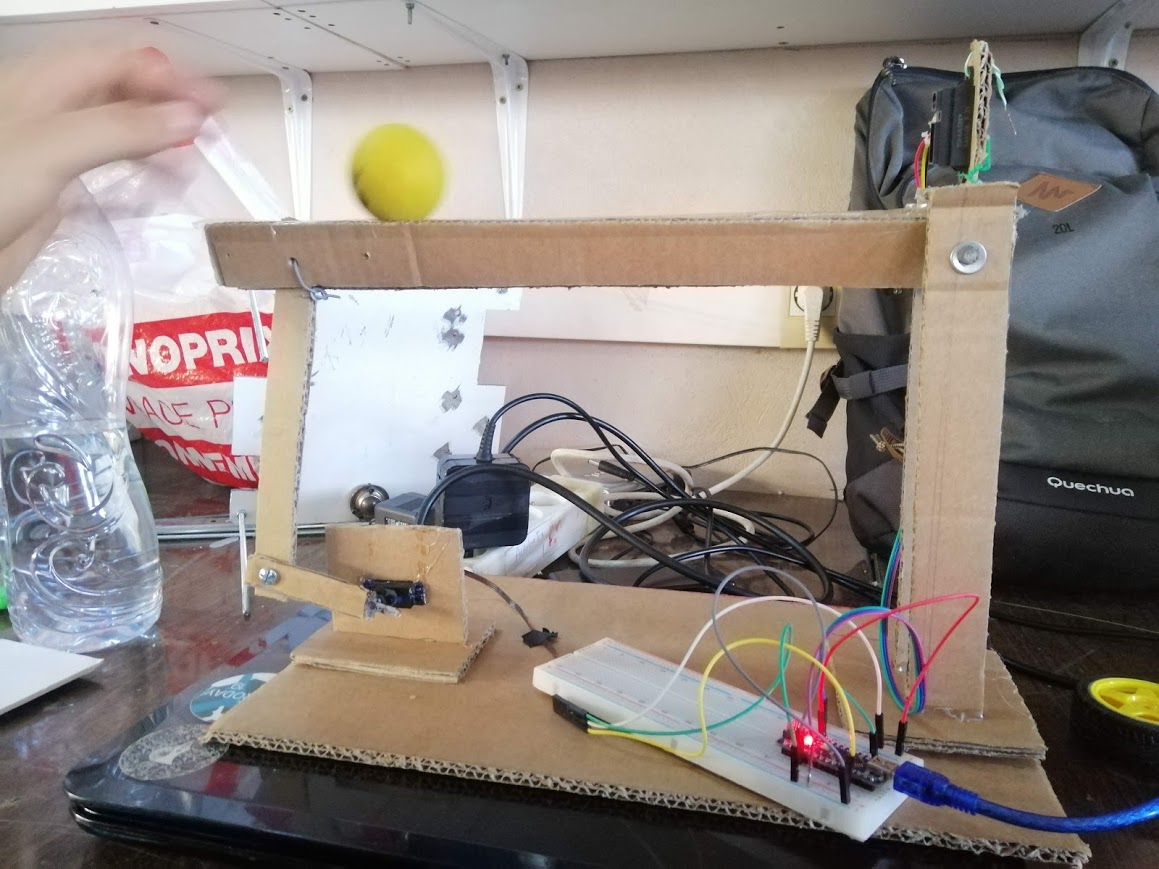
A ping pong ball sits on top of the beam rolling forward and backward according to the pitch of the beam. The pitch is controlled by a servo that is connected to an Arduino. The position of the ball is measured by a distance sensor mounted at the end of the beam.
A PID controller is used to control the position of the ball on the beam.
Physical SetupA ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle theta, the lever changes the angle of the beam by alpha.
When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. A controller will be designed for this system so that the ball's position can be manipulated.
So the transfer function becomes as shown in the equation:
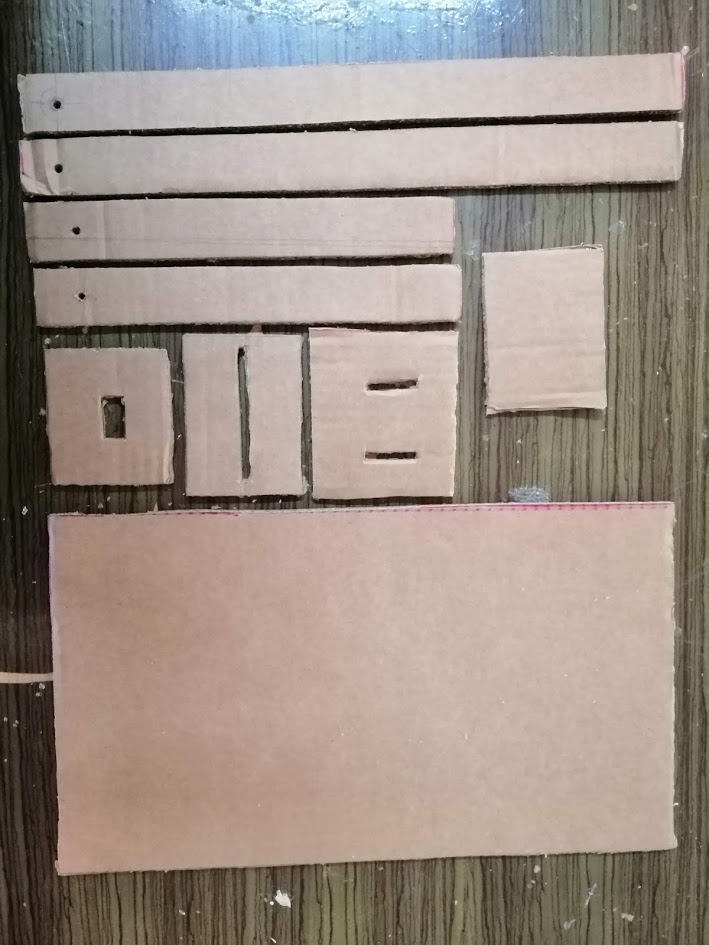
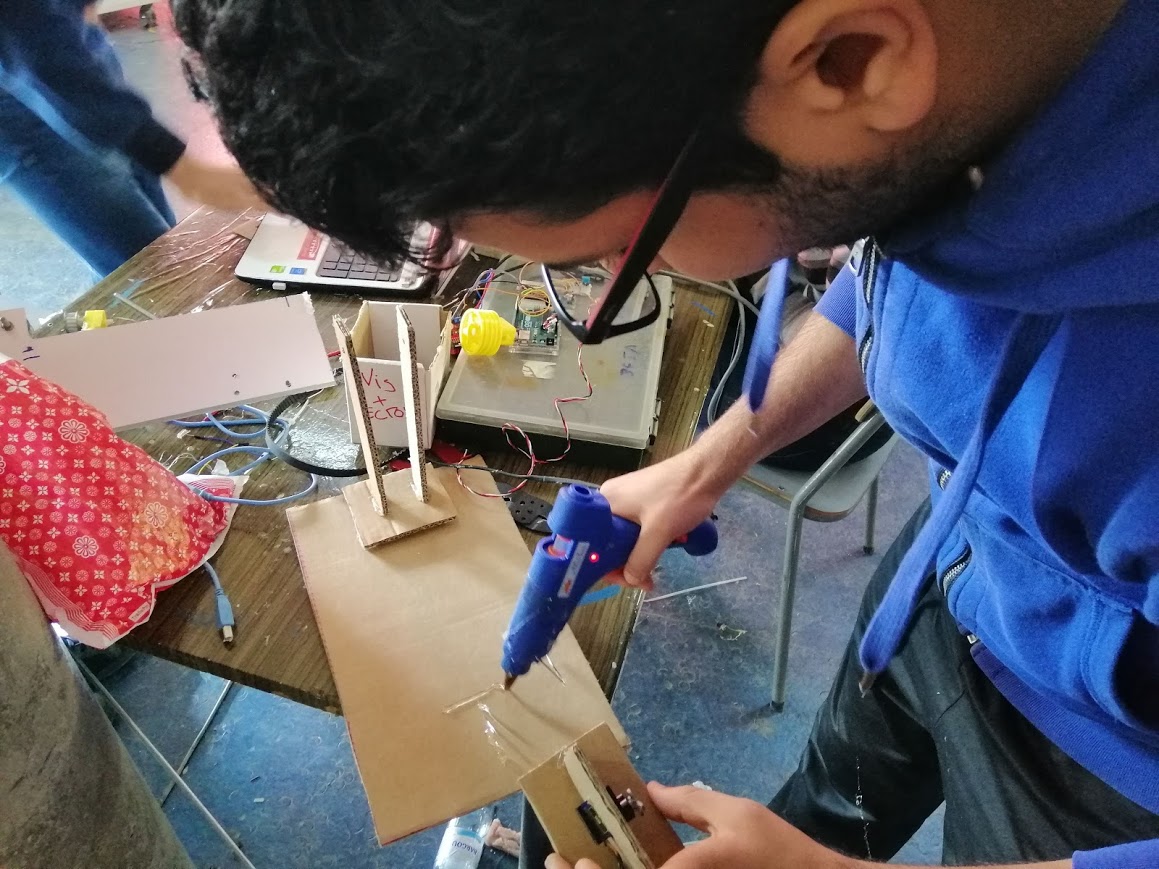
A simple card box can do the job.
- Base support (40 cm x 20 cm)
- 2 x Support (20 cm)
- 2 x Beam (34 cm)
- Servo motor horn (5 cm)
- Lever horn (10 cm)
- Ping pong ball
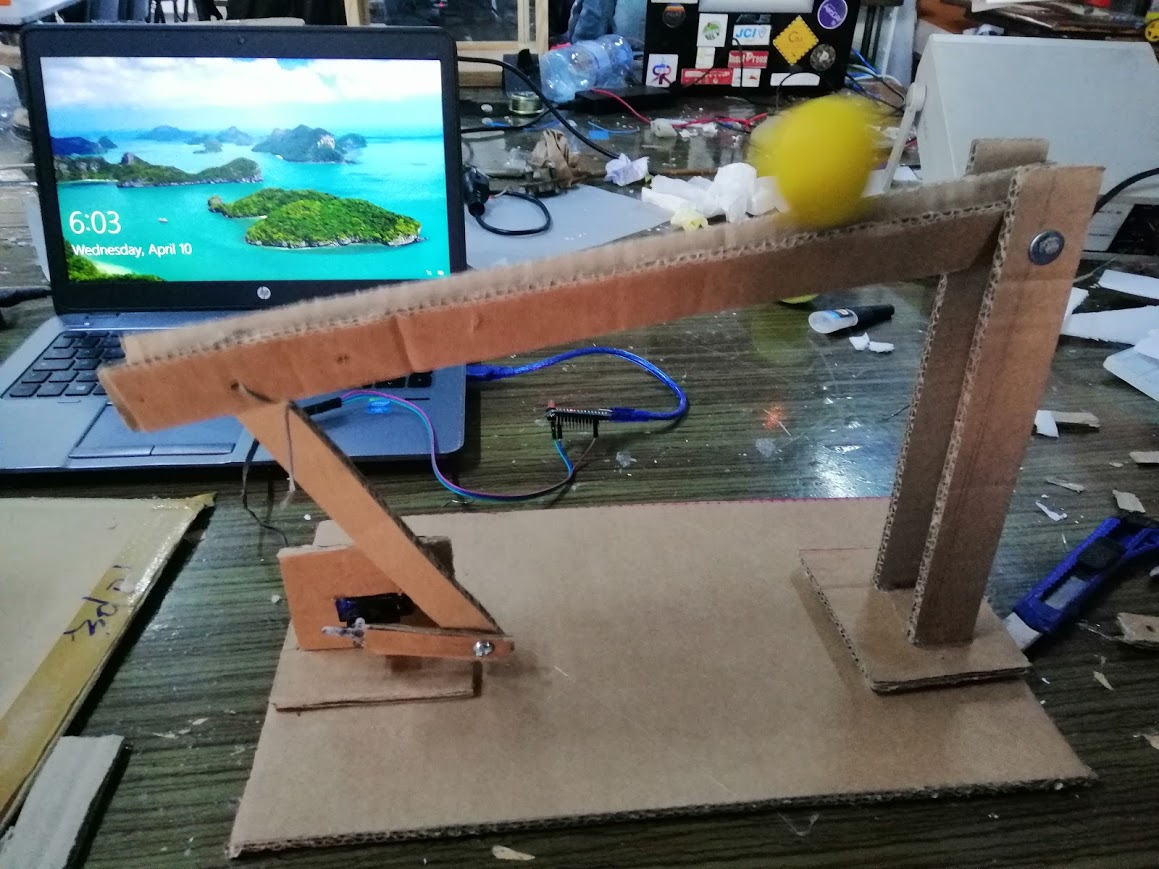
This is what it looks like:
You will need:
- Arduino (Nano)
- Servo motor
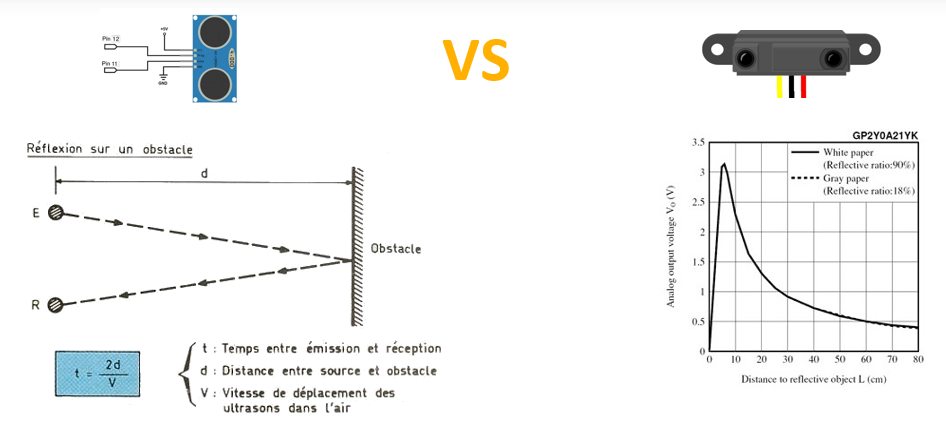
- Sharp sensor
- Cables and jumper
- Breadboard
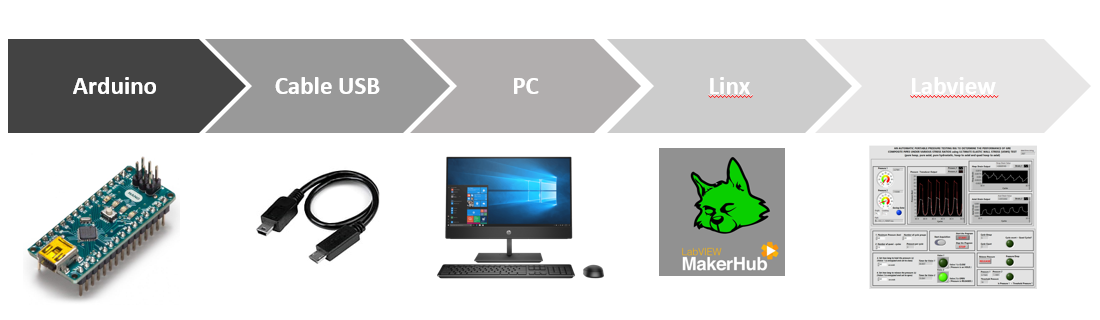
The wiring should be the following:
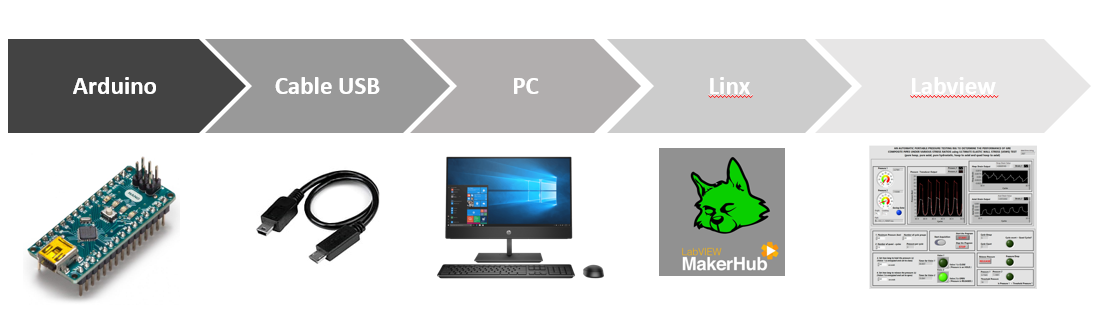
First of all, you should know how to establish correct communication between Arduino and Linux. If not, check this link.
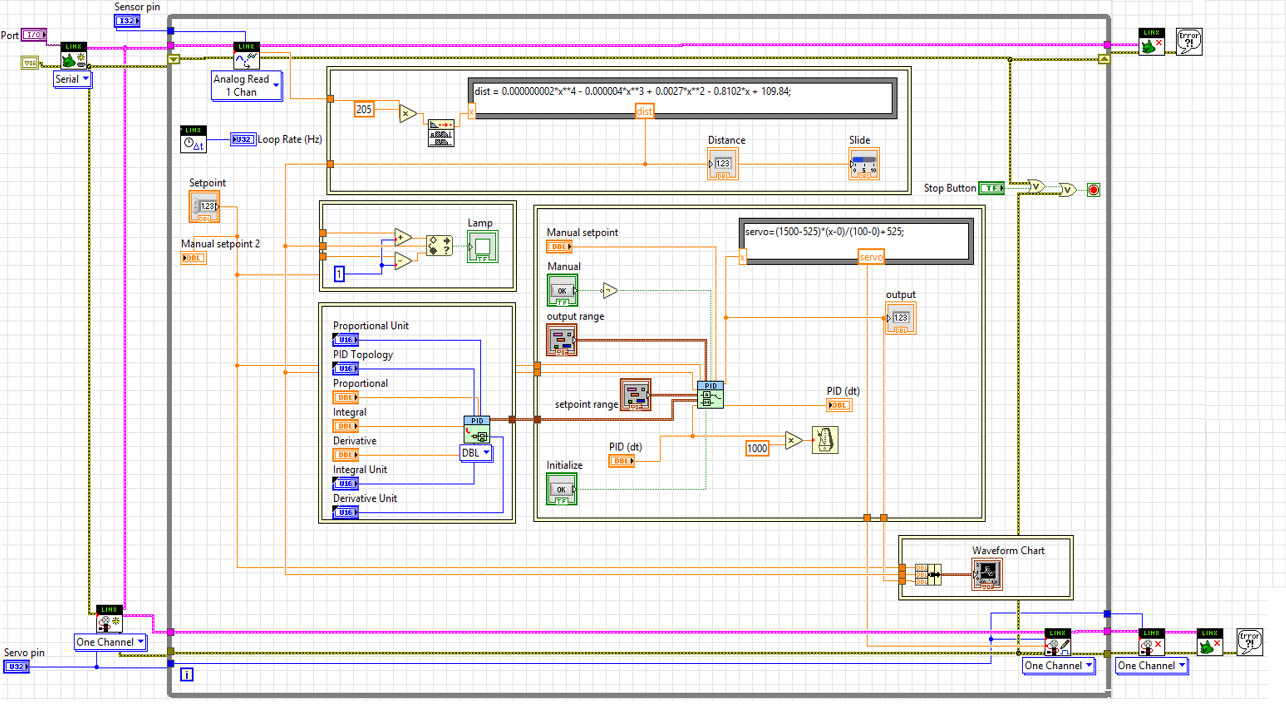
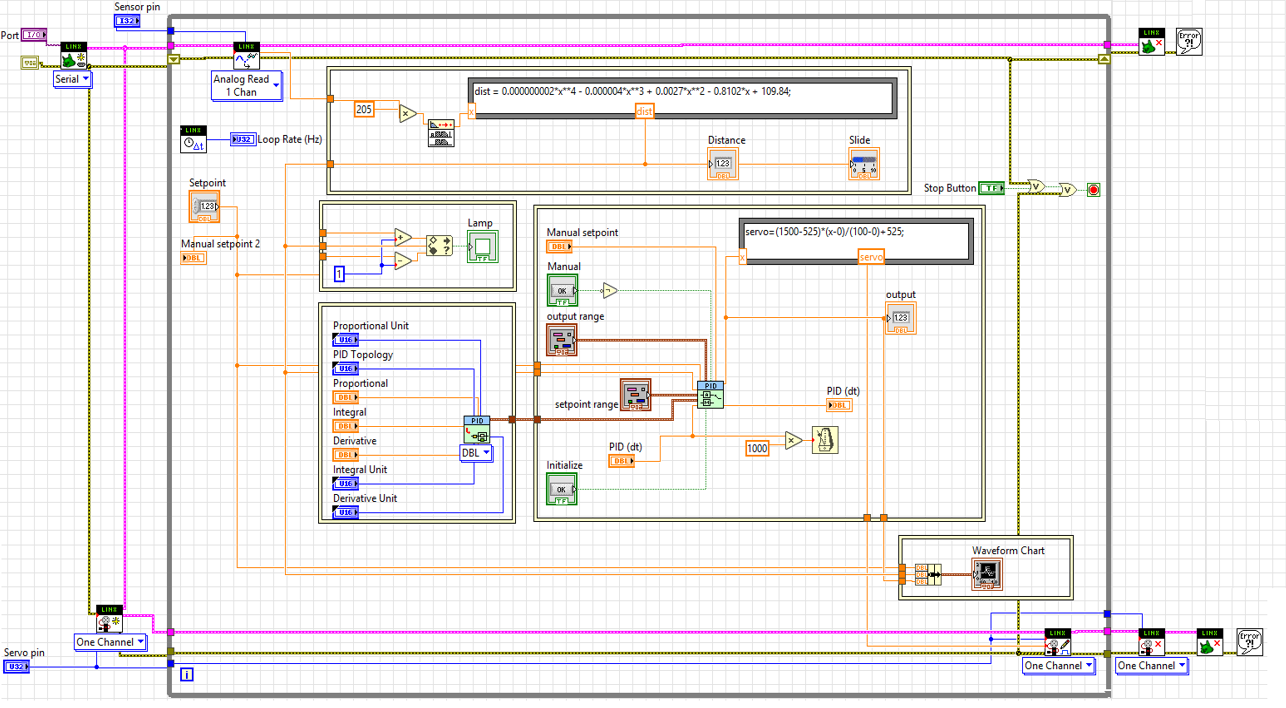
So a basic dashboard for the control system should look like this:
You should adjust the control parameters with the correct values.
If you want to no more how to determine these coefficients, navigate to this link.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments