I'd like to make 4-legs robot with Raspberry Pi as his brain.
1 / 6 • Real construction, standing fine:) can turn every part of legs.
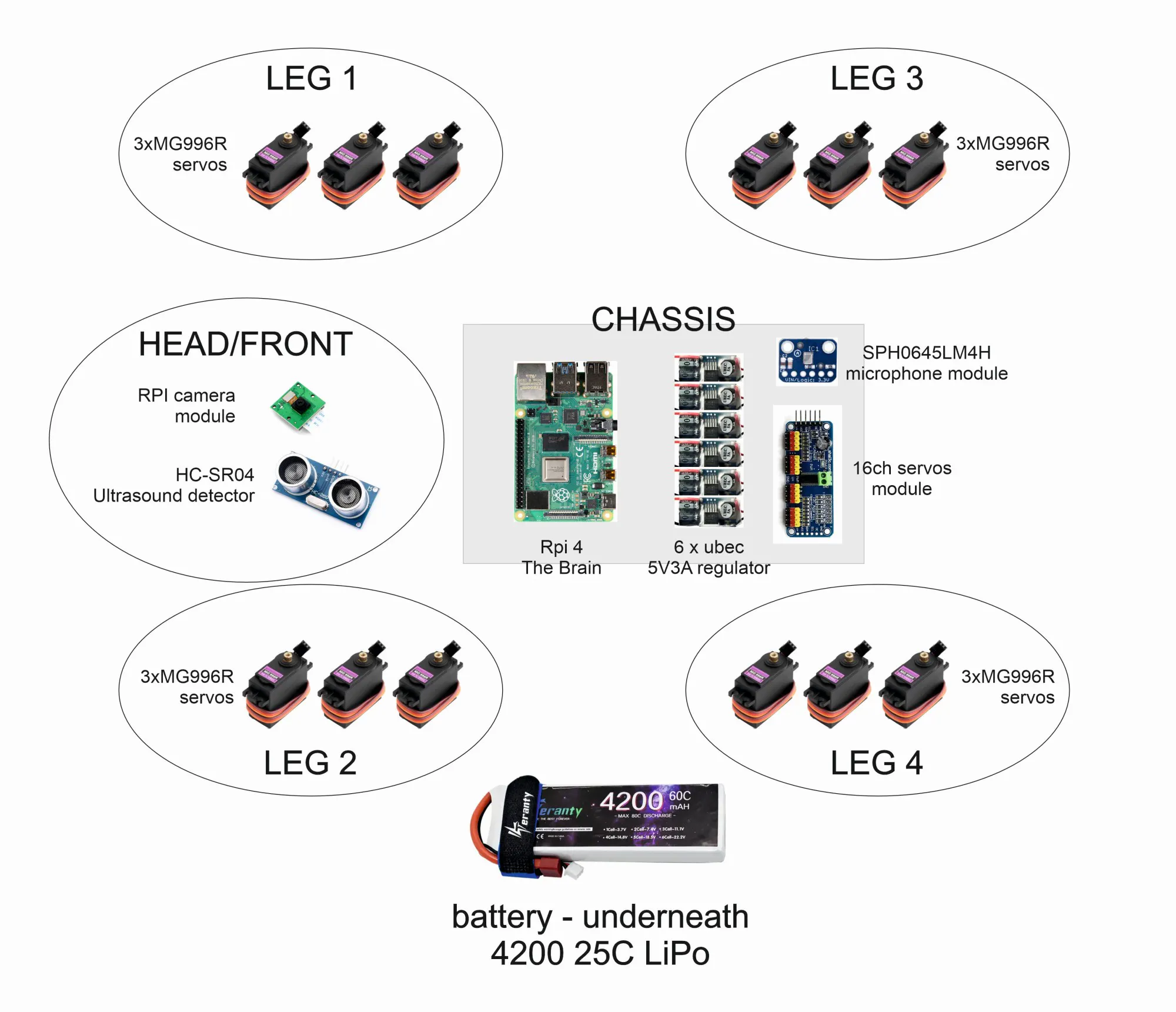
1 / 2 • Robo's Design Preview
So far I have something like that:
Currently, the robot can move its legs(via Xbox controller), and I'm trying to teach it to walk.
The robot runs on a standard Raspbian system.
Next, I want to add a rpi camera(or stereo camera maybe?) and voice control and an Xbox gamepad.
I'm not sure if switching to ROS is a better solution than a standard Raspbian.


















{kind=link}
Comments