

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
DFRobot is an awesome online store with everything you would need for your own electronic projects. I had a shopping cart of about 100 items in a matter of minutes! There are way too many awesome things to buy. They are also the sponsor for this project, so please feel free to go over and check them out at dfrobot.com.
AS3935The AS3935 is a lightning sensor IC. It can sense lightning that is from cloud to ground, or cloud to cloud, up to 40km (25 miles) away, in increments of 1km (0.6 miles) using a 500khz antenna. DFRobot created the breakout with everything needed on it, so there is no need for external parts to have the lightning sensor work. For more info, take a look at the data sheet. It can be bought on amazon or DFRobot.
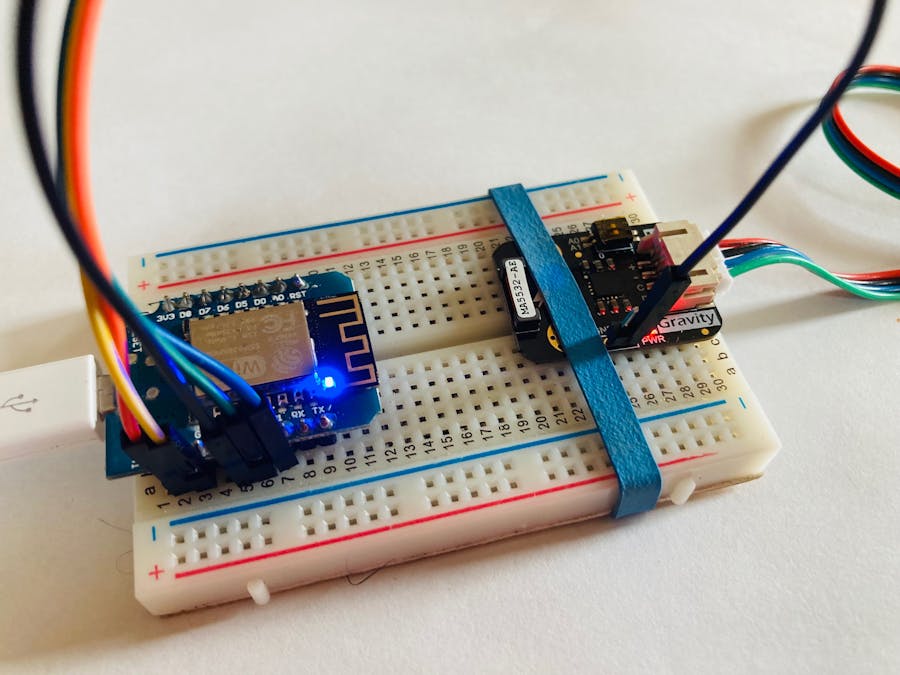
ConnectionsThere are only two parts, so the connections are nice and simple :).
D1-Mini - AS3935
- - GND
+ - 5V
IRQ - D3 (GPIO0)
D - D2 (GPIO4)
C - D1 (GPIO5)
Blynk Setup uses only a few widgets. Three value displays and a terminal. You can also add a superchart to keep track of lightning strikes.
First, create a new project and add a device named "Lightning" (or whatever you like :) ).
Next, add widgets.
All the widget's settings are shown below:
Here is the complete Blynk setup in editing mode:
And play mode:
This is a description of what each section of code does. The entire code can be found at the bottom of this tutorial.
#define BLYNK_PRINT Serial
#define ICACHE_RAM_ATTR
#include <DFRobot_AS3935_I2C.h>
#include <TimeLib.h>
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <WidgetRTC.h>
#include <WidgetTimeInput.h>Including libraries. If you would like less serial printing, delete the first line.
Note: Do not rearrange the libraries. If done, the code will not compile.
char auth[] = "*********YOUR_BLYNK_AUTH**********";
char ssid[] = "YOUR_WIFI_SSID";
char pass[] = "YOUR_WIFI_PASS";Here is the Blynk / WiFi variables.
WidgetTerminal terminal(V5);
WidgetRTC rtc;
DFRobot_AS3935_I2C lightning0((uint8_t)IRQ_PIN);The top two lines are for Blynk and the latter for the lightning sensor.
volatile int8_t AS3935IsrTrig = 0;
uint8_t lightningDistKm;
uint32_t lightningEnergyVal;
String distanceMeasurement = "miles";
boolean locationSet = false;
boolean disturberSet = false;
boolean noiseSet = false;
boolean watchdogSet = false;
boolean spikeSet = false;
boolean notificationsSet = false;
boolean restartSet = false;
boolean notifications = true;
int noiseVal = 2;
int watchdogVal = 2;
int spikeVal = 2;These are many variables, mainly for the terminal interface. The variable distanceMeasurement is for setting what type of measurement you want to use for the distance away that the last lightning strike was. Options are miles or km.
BLYNK_WRITE(V5){
//location
if (String("location") == param.asStr()) {
if (locationSet == false){
terminal.println("You said: 'location'") ;
terminal.println("Please type 'indoor' or 'outdoor':") ;
locationSet = true;
}
}
if (locationSet == true){
if (String("indoor") == param.asStr()){
terminal.println("Success!");
terminal.println("Location setting set to 'indoor'.");
terminal.println("");
lightning0.setIndoors();
locationSet = false;
}
else if (String("outdoor") == param.asStr()){
terminal.println("Success!");
terminal.println("Location setting set to 'outdoor'.");
terminal.println("");
lightning0.setOutdoors();
locationSet = false;
}
}
//disturber
if (String("disturber") == param.asStr()) {
if (disturberSet == false){
terminal.println("You said: 'disturber'") ;
terminal.println("Please type 'enable' or 'disable':") ;
disturberSet = true;
}
}
if (disturberSet == true){
if (String("enable") == param.asStr()){
terminal.println("Success!");
terminal.println("Disturber setting set to 'enable'.");
terminal.println("");
lightning0.disturberEn();
disturberSet = false;
}
else if (String("disable") == param.asStr()){
terminal.println("Success!");
terminal.println("Disturber setting set to 'disable'.");
terminal.println("");
lightning0.disturberDis();
disturberSet = false;
}
}
//noise
if (String("noise") == param.asStr()) {
if (noiseSet == false){
terminal.println("You said: 'noise'") ;
terminal.print("Current value is '");
terminal.print(noiseVal);
terminal.println("'.");
terminal.println("Please type '1' - '7':") ;
noiseSet = true;
}
}
if (noiseSet == true){
//if (String("") != param.asStr()){
noiseVal = param.asInt();
if (noiseVal >= 1 && noiseVal <= 7){
lightning0.setNoiseFloorLvl(noiseVal);
terminal.println("Success!");
terminal.print("Noise setting set to '");
terminal.print(noiseVal);
terminal.println("'.");
terminal.println("");
noiseSet = false;
}
}
//watchdog
if (String("watchdog") == param.asStr()) {
if (watchdogSet == false){
terminal.println("You said: 'watchdog'") ;
terminal.print("Current value is '");
terminal.print(watchdogVal);
terminal.println("'.");
terminal.println("Please type '1' - '7':");
watchdogSet = true;
}
}
if (watchdogSet == true){
watchdogVal = param.asInt();
if (watchdogVal >= 1 && watchdogVal <= 7){
lightning0.setWatchdogThreshold(watchdogVal);
terminal.println("Success!");
terminal.print("Watchdog setting set to '");
terminal.print(watchdogVal);
terminal.println("'.");
terminal.println("");
watchdogSet = false;
}
}
//spike
if (String("spike") == param.asStr()) {
if (watchdogSet == false){
terminal.println("You said: 'spike'") ;
terminal.print("Current value is '");
terminal.print(spikeVal);
terminal.println("'.");
terminal.println("Please type '1' - '7':");
spikeSet = true;
}
}
if (spikeSet == true){
spikeVal = param.asInt();
if (spikeVal >= 1 && spikeVal <= 7){
lightning0.setSpikeRejection(spikeVal);
terminal.println("Success!");
terminal.print("Spike setting set to '");
terminal.print(spikeVal);
terminal.println("'.");
terminal.println("");
spikeSet = false;
}
}
//notifications
if (String("notifications") == param.asStr()) {
if (notificationsSet == false){
terminal.println("You said: 'notifications'") ;
terminal.println("Please type 'enable' or 'disable':") ;
notificationsSet = true;
}
}
if (notificationsSet == true){
if (String("enable") == param.asStr()){
terminal.println("Success!");
terminal.println("Notifications setting set to 'enable'.");
terminal.println("");
notifications = true;
notificationsSet = false;
}
else if (String("disable") == param.asStr()){
terminal.println("Success!");
terminal.println("Notifications setting set to 'disable'.");
terminal.println("");
notifications = false;
notificationsSet = false;
}
}
if (String("info") == param.asStr()) {
terminal.println("");
terminal.println("-------------");
terminal.println("Lightning Bot");
terminal.println("");
terminal.println("Lightning Bot is an interactive lightning sensor.");
terminal.print("It can sense lightning up to 40km (25 miles) away,");
terminal.print(" in 2.7km (1.7 miles) increments! It can also sense");
terminal.print(" relative lightning strength (arbitrary number, not");
terminal.println(" legit measurement.)");
terminal.println("");
terminal.println("-------------");
terminal.println("");
terminal.println("");
}
//menu
if (String("menu") == param.asStr()) {
terminal.println(F(""));
terminal.println(F("Lightning Settings:"));
terminal.println(F("(1) 'location'"));
terminal.println(F("(2) 'disturber"));
terminal.println(F("(3) 'noise'"));
terminal.println(F("(4) 'watchdog'"));
terminal.println(F("(5) 'spike'"));
terminal.println(F("Other Settings:"));
terminal.println(F("(6) 'notifications'"));
terminal.println(F("(7) 'info'"));
terminal.println(F("(8) 'menu'"));
terminal.println(F("(9) 'clear'"));
terminal.println(F("(10) 'restart'"));
terminal.println(F(""));
}
//clear
if (String("clear") == param.asStr()) {
terminal.clear();
}
//restart
if (String("restart") == param.asStr()) {
terminal.println("You said: 'restart'") ;
terminal.println("Are you sure you want to restart?");
terminal.println("WiFi connection will be lost for ~20 seconds.");
terminal.println("Please type 'yes' or 'no':") ;
restartSet = true;
}
if (restartSet == true){
if (String("yes") == param.asStr()){
terminal.println("Restarting...");
terminal.flush();
Blynk.run();
ESP.restart();
}
else if (String("no") == param.asStr()){
terminal.println("Okay.");
terminal.println("");
restartSet = false;
}
}
// Ensure everything is sent
terminal.flush();
}Now this is a long one :). This is the Blynk terminal interface code. I have terminal on V5 for Blynk. If you would like to change that, change the very first line of this section and the "WidgetTerminal" line near the beginning to whatever virtual pin of your choosing.
void setup(){
Serial.begin(9600);
Serial.println("DFRobot AS3935 lightning sensor begin!");
lightning0.setI2CAddress(AS3935_ADD3);
while (lightning0.begin() != 0){
Serial.print(".");
}
if(lightning0.defInit() != 0){
Serial.println("I2C init fail");
while(1){}
}
lightning0.powerUp();
//set indoors or outdoors models
lightning0.setIndoors();
//lightning0.setOutdoors();
//disturber detection
lightning0.disturberEn();
//lightning0.disturberDis();
lightning0.setIRQOutputSource(0);
#if defined(ESP32) || defined(ESP8266)
attachInterrupt(digitalPinToInterrupt(IRQ_PIN),AS3935_ISR,RISING);
#else
attachInterrupt(/*Interrupt No*/0,AS3935_ISR,RISING);
#endif
delay(500);
//set capacitance
lightning0.setTuningCaps(AS3935_CAPACITANCE);
Serial.println("AS3935 manual cal complete");
// Enable interrupt (connect IRQ pin IRQ_PIN: 2, default)
// Connect the IRQ and GND pin to the oscilloscope.
// uncomment the following sentences to fine tune the antenna for better performance.
// This will dispaly the antenna's resonance frequency/16 on IRQ pin (The resonance frequency will be divided by 16 on this pin)
// Tuning AS3935_CAPACITANCE to make the frequency within 500/16 kHz ± 3.5%
// lightning0.setLcoFdiv(0);
// lightning0.setIRQOutputSource(3);
// Set the noise level,more than 7 will use the default value:2
lightning0.setNoiseFloorLvl(2);
//uint8_t noiseLv = lightning0.getNoiseFloorLvl();
//used to modify WDTH,alues should only be between 0x00 and 0x0F (0 and 7)
lightning0.setWatchdogThreshold(2);
//uint8_t wtdgThreshold = lightning0.getWatchdogThreshold();
//used to modify SREJ (spike rejection),values should only be between 0x00 and 0x0F (0 and 7)
lightning0.setSpikeRejection(2);
//uint8_t spikeRejection = lightning0.getSpikeRejection();
Blynk.begin(auth, ssid, pass);
//info
terminal.clear();
terminal.println("-------------");
terminal.println("Lightning Bot");
terminal.println("");
terminal.println("Lightning Bot is an interactive lightning sensor.");
terminal.print("It can sense lightning up to 40km (25 miles) away,");
terminal.print(" in 2.7km (1.7 miles) increments! It can also sense");
terminal.print(" relative lightning strength (arbitrary number, not");
terminal.println(" legit measurement.)");
terminal.println("");
terminal.println("-------------");
terminal.println("");
terminal.println("");
//menu
terminal.println(F("Lightning Settings:"));
terminal.println(F("(1) 'location'"));
terminal.println(F("(2) 'disturber"));
terminal.println(F("(3) 'noise'"));
terminal.println(F("(4) 'watchdog'"));
terminal.println(F("(5) 'spike'"));
terminal.println(F("Other Settings:"));
terminal.println(F("(6) 'notifications'"));
terminal.println(F("(7) 'info'"));
terminal.println(F("(8) 'menu'"));
terminal.println(F("(9) 'clear'"));
terminal.println(F("(10) 'restart'"));
terminal.println(F(""));
terminal.flush();
Blynk.virtualWrite(V1, 0);
Blynk.virtualWrite(V2, 0);
Blynk.virtualWrite(V3, 0);
}In setup(), the lightning sensor is started with all its default settings, Serial is started at 9600baud (can be changed to your preference), Blynk is started, which also connects to WiFi, and all the info and menu options are printed in terminal on the Blynk app.
void loop(){
if (AS3935IsrTrig != 0){
delay(5);
// Reset interrupt flag
AS3935IsrTrig = 0;
// Get interrupt source
uint8_t intSrc = lightning0.getInterruptSrc();
if (intSrc == 1)
{
// Get rid of non-distance data
lightningDistKm = lightning0.getLightningDistKm();
String currentTime = String(hour()) + "." + String(minute()) + "." + String(second());
Serial.println("Lightning occurred!");
Serial.print("Distance: ");
Serial.print(lightningDistKm);
Serial.println(" km");
Blynk.virtualWrite(V1, currentTime.toInt());
if (distanceMeasurement == "km"){
Blynk.virtualWrite(V3, lightningDistKm);
}
else if (distanceMeasurement == "miles"){
Blynk.virtualWrite(V3, lightningDistKm/1.609);
}
// Get lightning energy intensity
lightningEnergyVal = lightning0.getStrikeEnergyRaw();
Serial.print("Intensity: ");
Serial.print(lightningEnergyVal);
Serial.println("");
Blynk.virtualWrite(V2, lightningEnergyVal);
terminal.println("");
terminal.print(currentTime);
terminal.print(": Lightning. ");
if (distanceMeasurement == "km"){
terminal.print(lightningDistKm);
terminal.print(" km. ");
}
else if (distanceMeasurement == "miles"){
terminal.print(lightningDistKm/1.609);
terminal.print(" miles. ");
}
terminal.print(lightningEnergyVal);
terminal.println(" relative strength.");
if (notifications == true){
if (distanceMeasurement == "km"){
Blynk.notify("Lightning! Distance is " + String(lightningDistKm) + " km. Strength is " + String(lightningEnergyVal) + ". If you are not already indoors, please do so.");
}
else if (distanceMeasurement == "miles"){
Blynk.notify("Lightning! Distance is " + String(lightningDistKm/1.609) + " miles. Strength is " + String(lightningEnergyVal) + ". If you are not already indoors, please do so.");
}
}
}
else if (intSrc == 2)
{
String currentTime = String(hour()) + ":" + String(minute()) + ":" + String(second());
Serial.println("Disturber discovered!");
terminal.println("");
terminal.print(currentTime);
terminal.println(" Disturber");
}
else if (intSrc == 3)
{
Serial.println("Noise level too high!");
}
}
//View register data
//lightning0.printAllRegs();
Blynk.run();
}In loop(), first, we check if IRQ is triggered. If so, we check to see if it was a lightning event, a disturber, or just noise. If it is lightning, it is printed to the Blynk terminal and the displays on Blynk are updated also. At the end, there is Blynk.run(); for staying connected to the Blynk server and the WiFi.
//IRQ handler for AS3935 interrupts
ICACHE_RAM_ATTR void AS3935_ISR()
{
AS3935IsrTrig = 1;
}This is the interrupt function.
Note: Before uploading the code, change the WiFi credentials and Blynk auth at the beginning.
How to Use ItAfter uploading this code to your ESP8266, Blynk terminal should have information on it. To change a setting, type the setting you would like to change, into terminal. Then you will get a response asking for additional information for the setting you have chosen. Send the specified value, and the setting is changed! If the value you sent is not within the specified range, you will not get a response.
Menu options and what they do:
That is it for this tutorial! If you liked it, please thumb up! If you have any questions or comments feel free to post them in the comment section below. And check out my other tutorials!
and my website




Comments