




Background
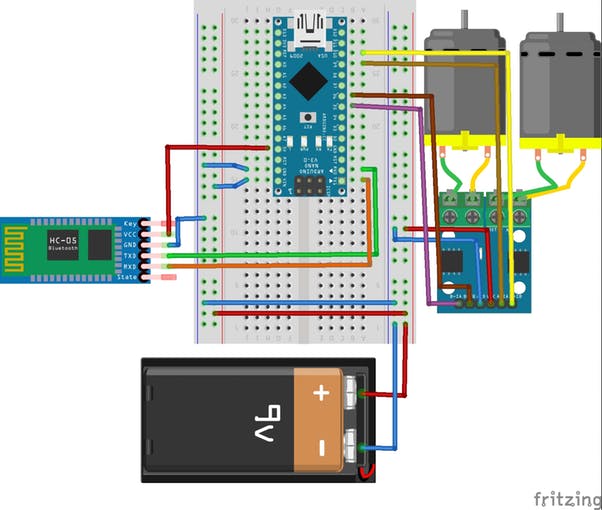
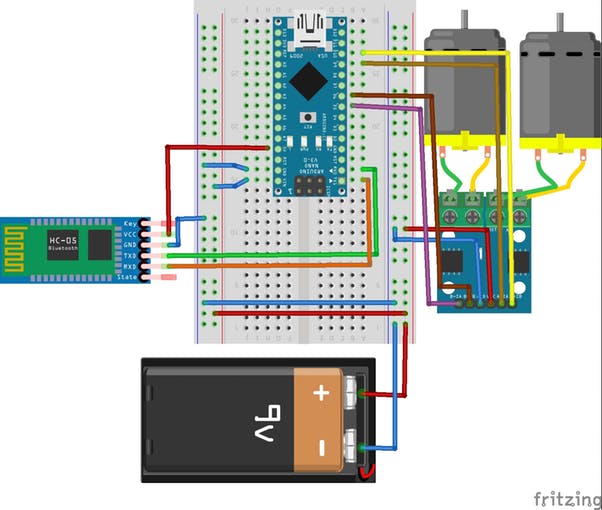
Read moreAt this time, it has produced RC car that can be controlled remotely by using Arduino Nano, Bluetooth receiver, and motor. Care should be taken when compiling the Bluetooth receiver and the TX pin and the RXD pin of the Arduino Nano while connecting. This can be controlled by the controller mode of the Arduino Bluetooth controller.
{kind=link}


100 projects • 115 followers
Looking back on my childhood, I was happy when I was making something and I was proud of myself.
"Making is instinct!"
Comments