For this project, I created a simple but essential program: a real-time second counter displayed on an LCD. I wanted to build something that shows how timing, looping, and data display work together inside a microcontroller. It may look like a small feature, but it forms the foundation of many real embedded applications—like timers, clocks, and monitoring systems. That idea inspired me to make it.
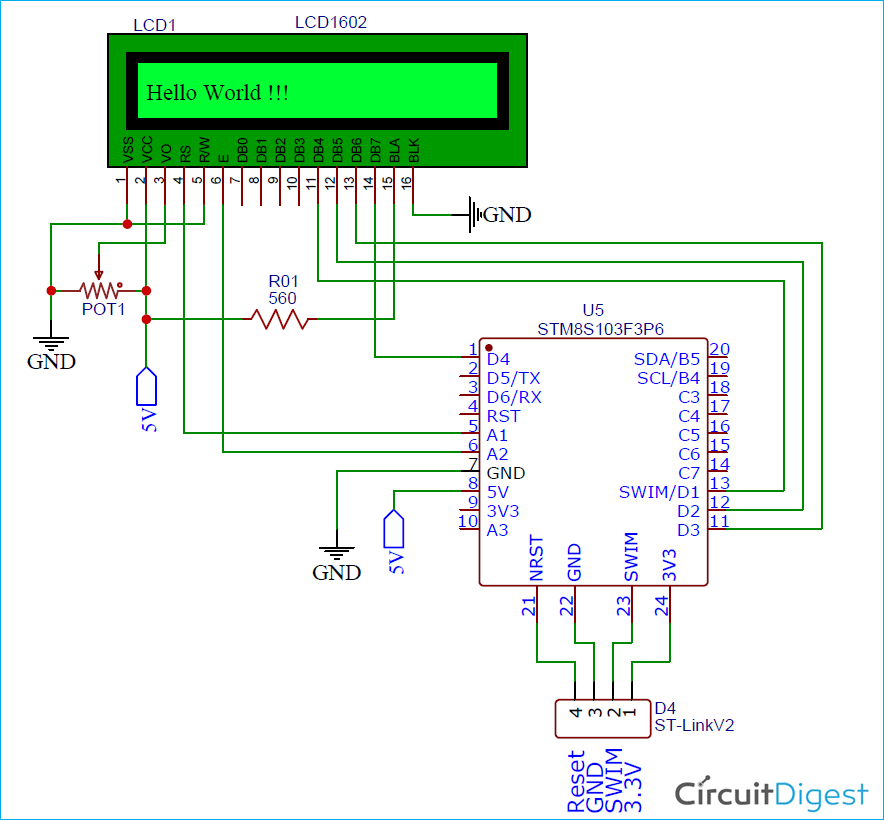
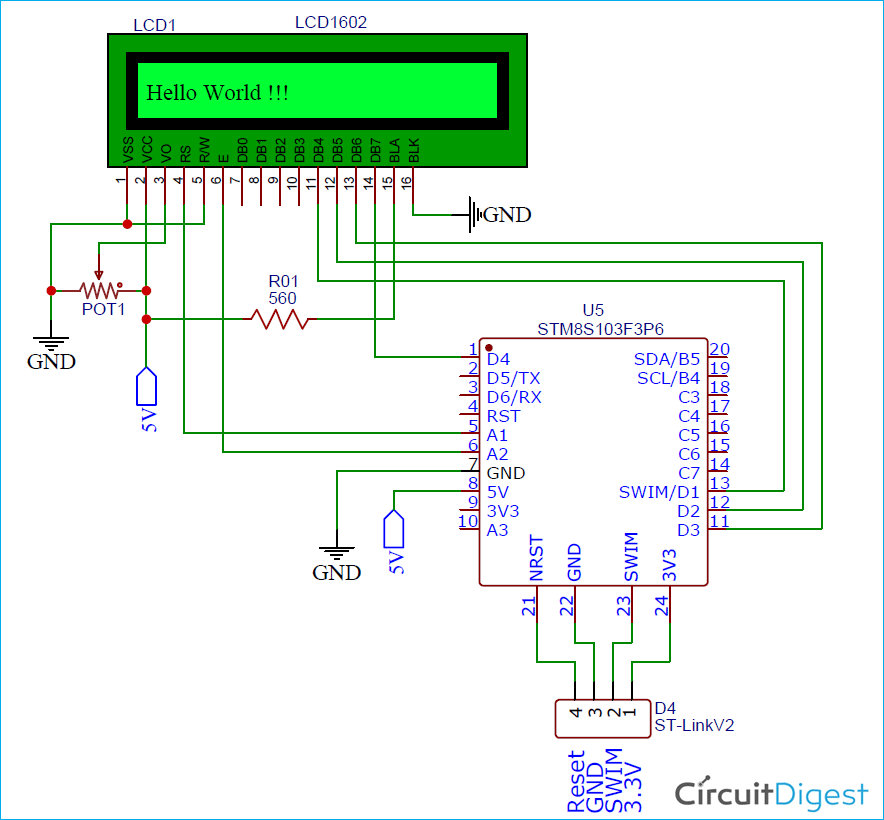
To make the counter work, I started by declaring an integer variable and initializing it to zero. Then, I used a loop that runs continuously. Inside that loop, the variable increments every second. Each time the value updates, I convert the integer into a string using sprintf(), making it ready to be shown on the LCD. After that, I simply send the string to the display. As long as the program is running, the number keeps increasing and the LCD updates in real time.
In the end, the project demonstrates how software logic and hardware output can synchronize perfectly, even with something as simple as a second counter. It’s a small step, but it reflects a deeper understanding of embedded systems and real-time programming.















{kind=link}
{kind=link}
{kind=link}
Comments