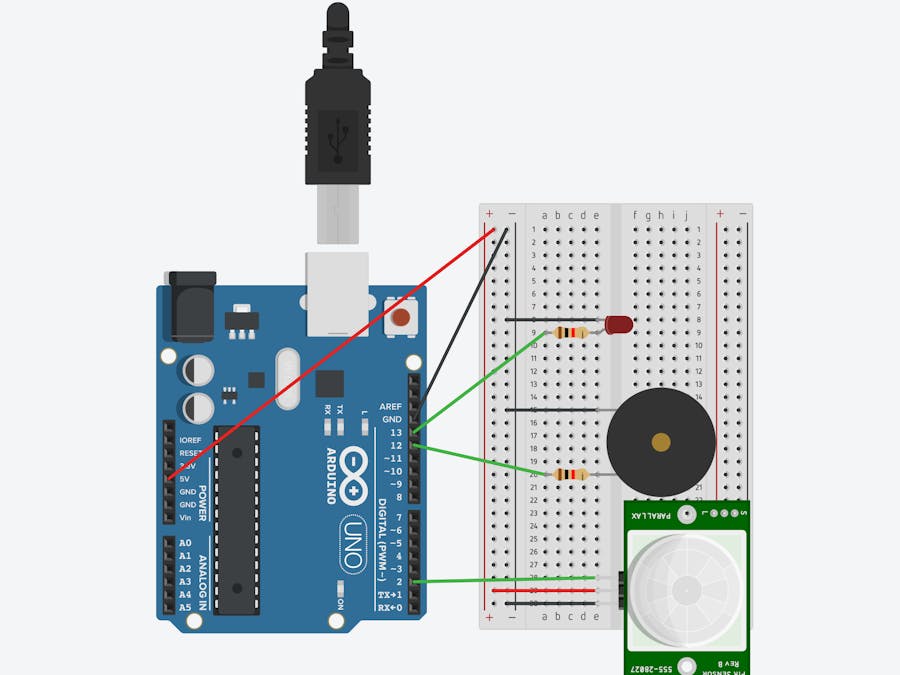
int ledPin = 13;
int nxtPinA = 11;
int nxtPinB = 9; // choose the pin for the LED
int inputPin = 2; // choose the input pin (for PIR sensor)
int pirState = LOW; // we start, assuming no motion detected
int val = 2;
int piezoPin = 12;
//Variable to store analog value (0-1023)
// variable for reading the pin status
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(piezoPin, OUTPUT);
pinMode(nxtPinA, OUTPUT);
pinMode(nxtPinB, OUTPUT);// declare LED as output
pinMode(inputPin, INPUT); // declare sensor as input
Serial.begin(9600);
}
void loop(){
val = digitalRead(inputPin); // read input value
if (val == HIGH) { // check if the input is HIGH
digitalWrite(ledPin, HIGH);
digitalWrite(nxtPinA, HIGH);
digitalWrite(nxtPinB, HIGH);
digitalWrite(ledPin, HIGH);
tone(piezoPin, 1000, 500);
// turn LED ON
if (pirState == LOW) {
// we have just turned on
Serial.println("Motion detected!");
// We only want to print on the output change, not state
pirState = HIGH;
}
} else {
digitalWrite(ledPin, LOW);
if (pirState == HIGH){
// we have just turned of
Serial.println("Motion ended!");
// We only want to print on the output change, not state
pirState = LOW;
}
}
}











{kind=link}
Comments