Introduction:As a kid, those in our group shared the passion for cars and speed. Not being old enough to drive fast ourselves, we would imagine being in the driver's seat of our model cars, match box cars, hot wheels, etc. The need was speed, and we would race our friends to see who the fastest “driver” was. Even as adults, this idea being the fastest reigns true for most of us. However, safety and the law prohibits us from actually pursuing that desire (in most cases). However, we used this IOT project to simulate a drag-strip type track that records times and uploads them to show who the winner was and what their race time was.
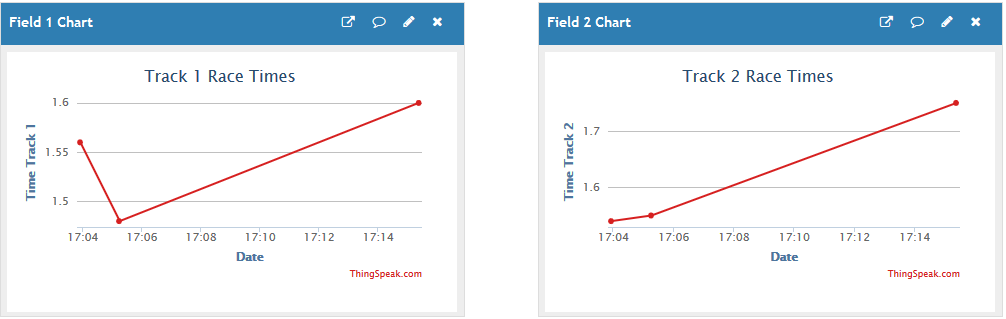
In our project, we are using bi-directional communication between three Particle Argons in order to time ‘Hot Wheels’ cars and decide upon a winner. The intent of the project is to simulate race like situations, in a more repeatable environment. The model can be upscaled for different applications, rc cars, drones, etc., given coordinating track set-ups.
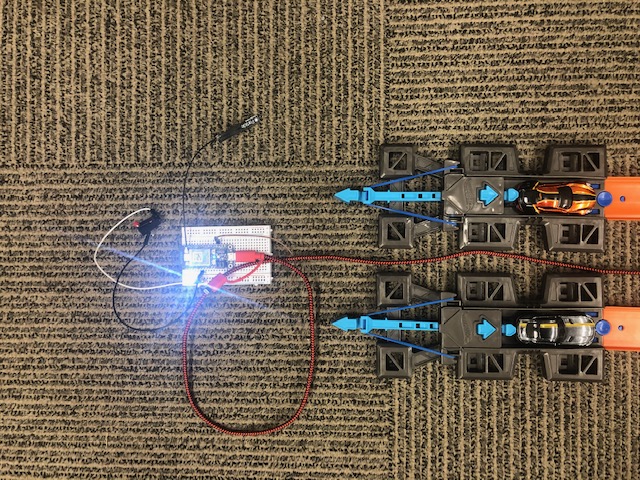
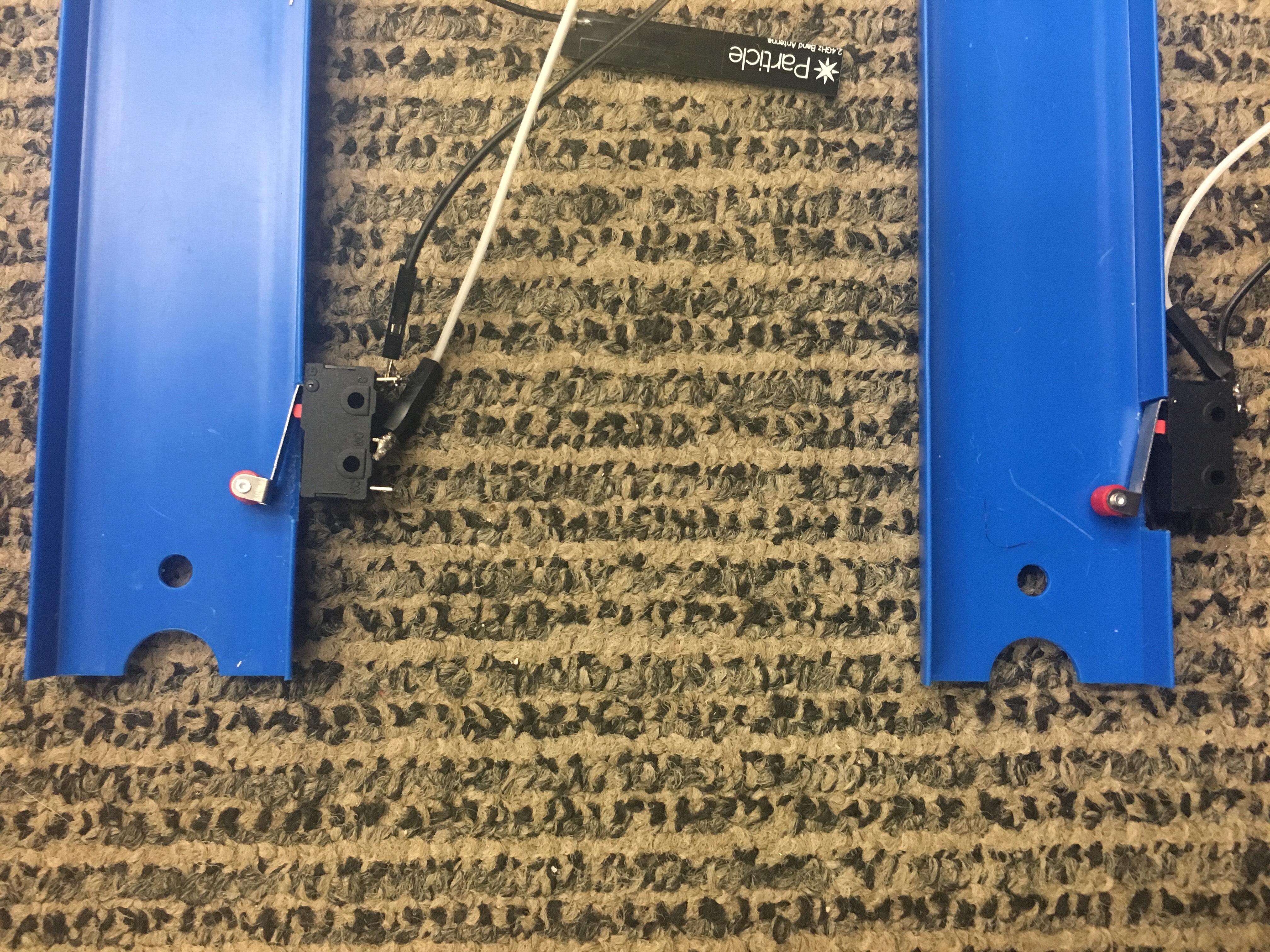
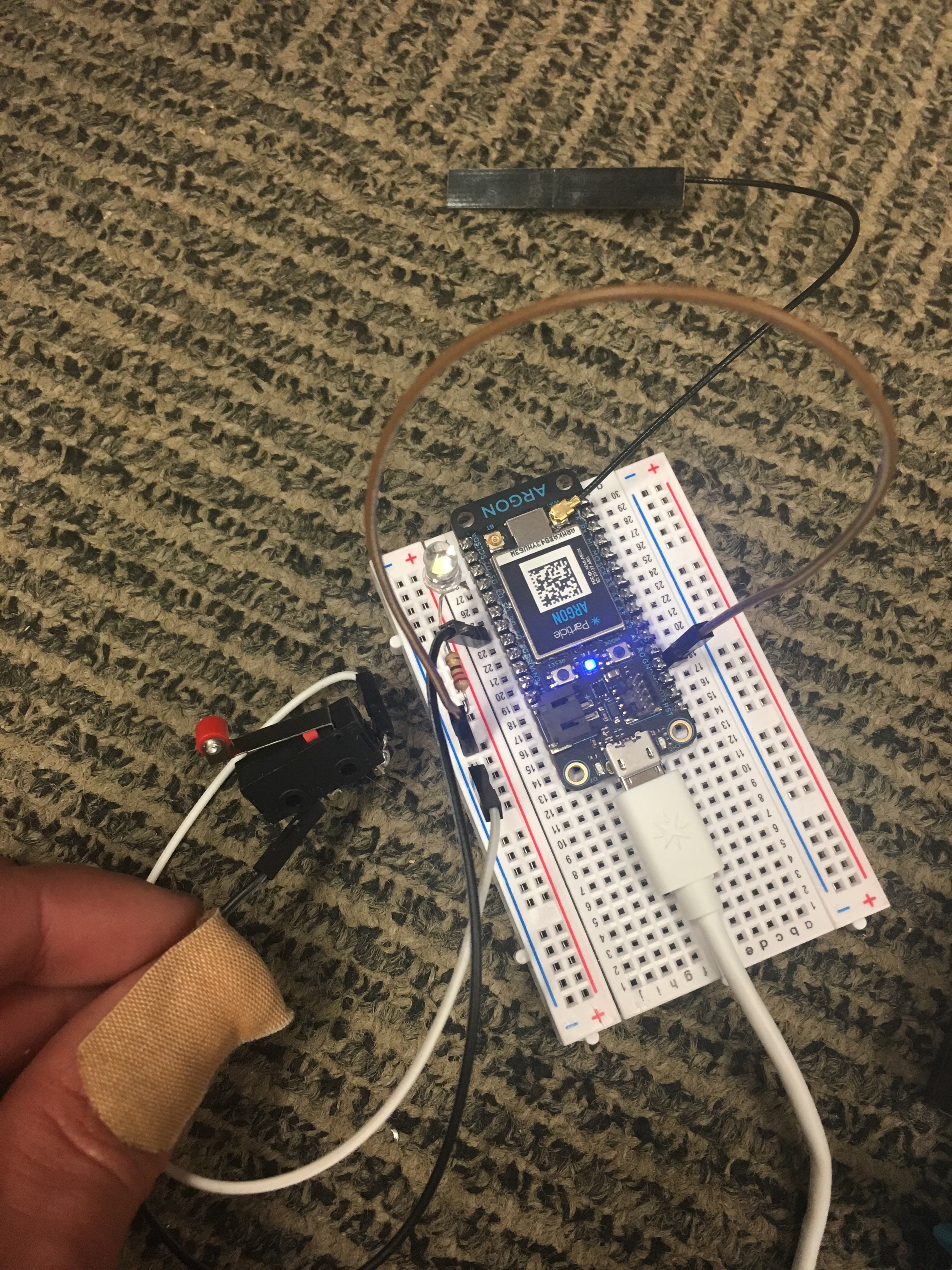
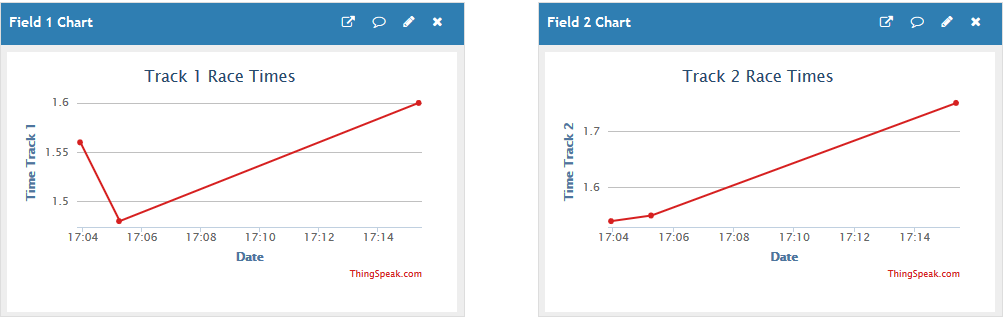
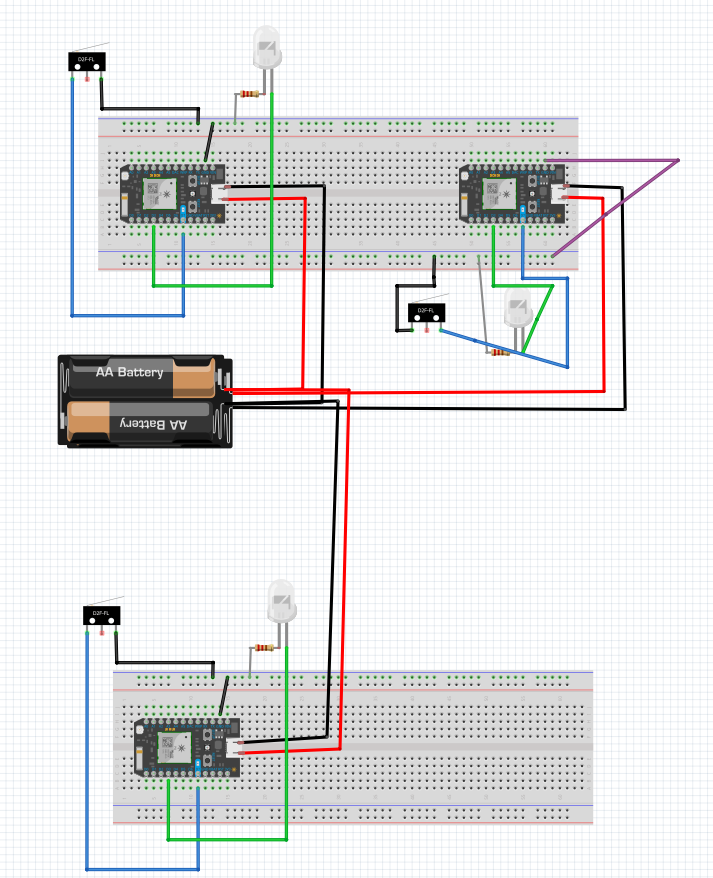
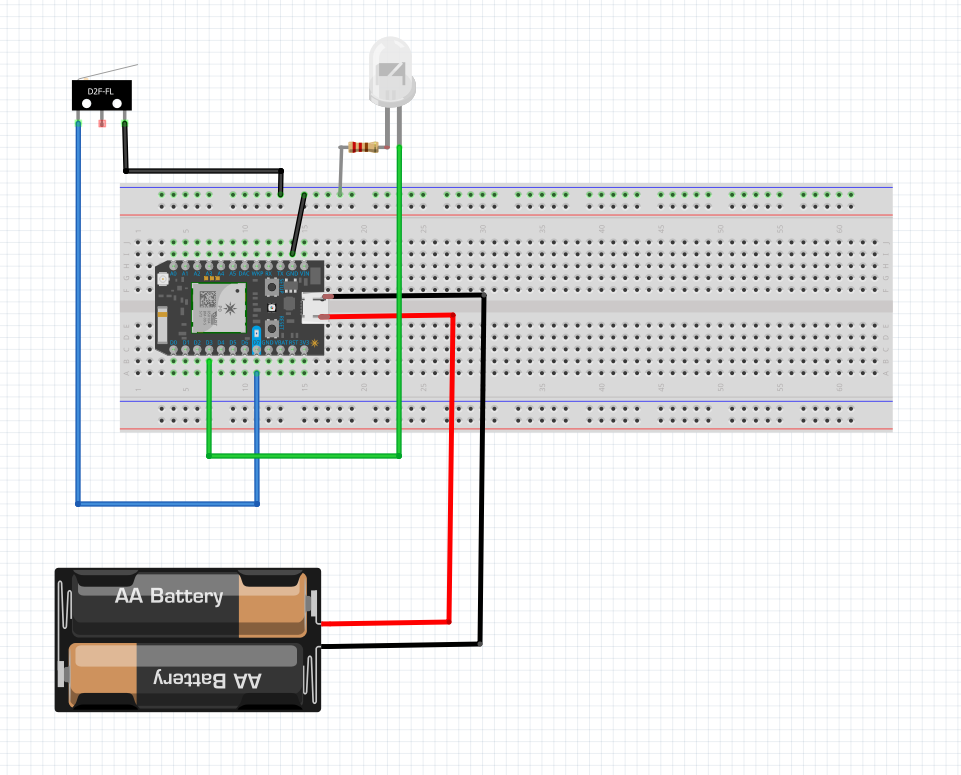
How it Works:One Particle Argon, Argon 1, is located at the beginning of the track connected to a micro-switch. Two more Argons, Argons 2 and 3, are located at the end of the track, connected to micro-switches in each lane. All three boards have an LED light connected which signal various things. The micro-switch wired to Argon 1 is pressed, turning on the LED connected. This sends a signal to Argons 2 and 3 to prepare to start recording a time, simultaneously, turning on the LED lights connected to these two Argons. Argons 2 and 3 begin counting. When the cars reach the end of the track and trigger the micro-switches connected to Argons 2 and 3, they stop counting and send a signal to Argon 1 signifying the end of the race. Argon 2 send its time to Argon 3, and Argon 3 sends its time to Argon 2 to compare which lane had the fastest time. The LED of the Argon in the lane of the winner will remain illuminated and the losing lane will extinguish its LED.





_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments