


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
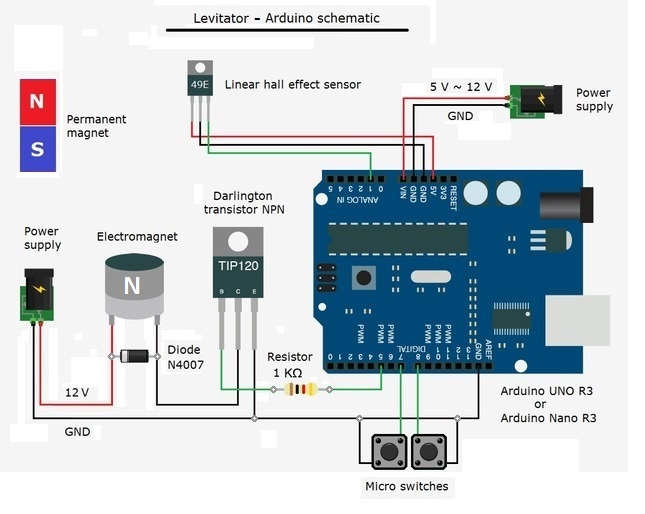
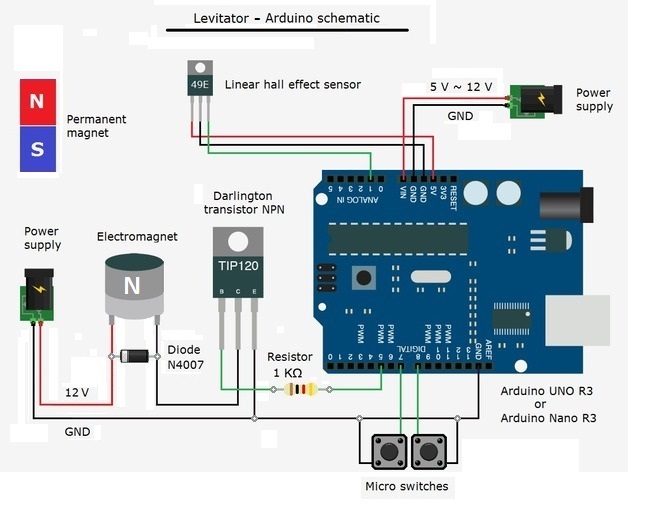
Levitator with Arduino.
You can 3D print the body or not.
https://www.thingiverse.com/thing:1392023
- Easy to print and mount (Just some glue, no screws).
- Just install the firmware(Levitator.ino) in the arduino board.
- Do not need a computer, just the 12V power supply, after install the firmware.
- Use the switches to adjust the permanent magnet position.
- Use the arduino serial monitor to see the correct value for you.
- You can hard code the correct value in your toy.
You can use a protoboard or make your board (Arduino Nano).
http://www.thingiverse.com/thing:1392530
Or just buy one:
https://oshpark.com/shared_projects/kxH3Ak1b
Attention:
- Put the hall sensor in the bottom of the tip(top_sensor.stl) see the images;
- To work correct, the hall effect sensor must be at least 5mm of distance from electromagnetic;
- You can use other linear hall sensor (do not use hall sensor switch);
- Use neodymium permanent magnets (it will not work with common magnets);
- Heavy objects are more stable;
See my makes in the Thingiverse for more details and tips.
Levitator 3D Printed:
https://www.thingiverse.com/make:201394
Shield for Arduino Nano:
https://www.thingiverse.com/make:201420
That is easy.




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments