

Hardware components | ||||||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
The idea stems from building a rover that can collect hair ties on the ground. I have a cat and she loves playing with hair ties.
Then, project developed into a 4WD WiFi-controlled rover built on a pre-made four-wheel-drive chassis with four DC motors and a custom 3D-printed Bronco-style body. I wanted to have a car base first then adding on different functionality.
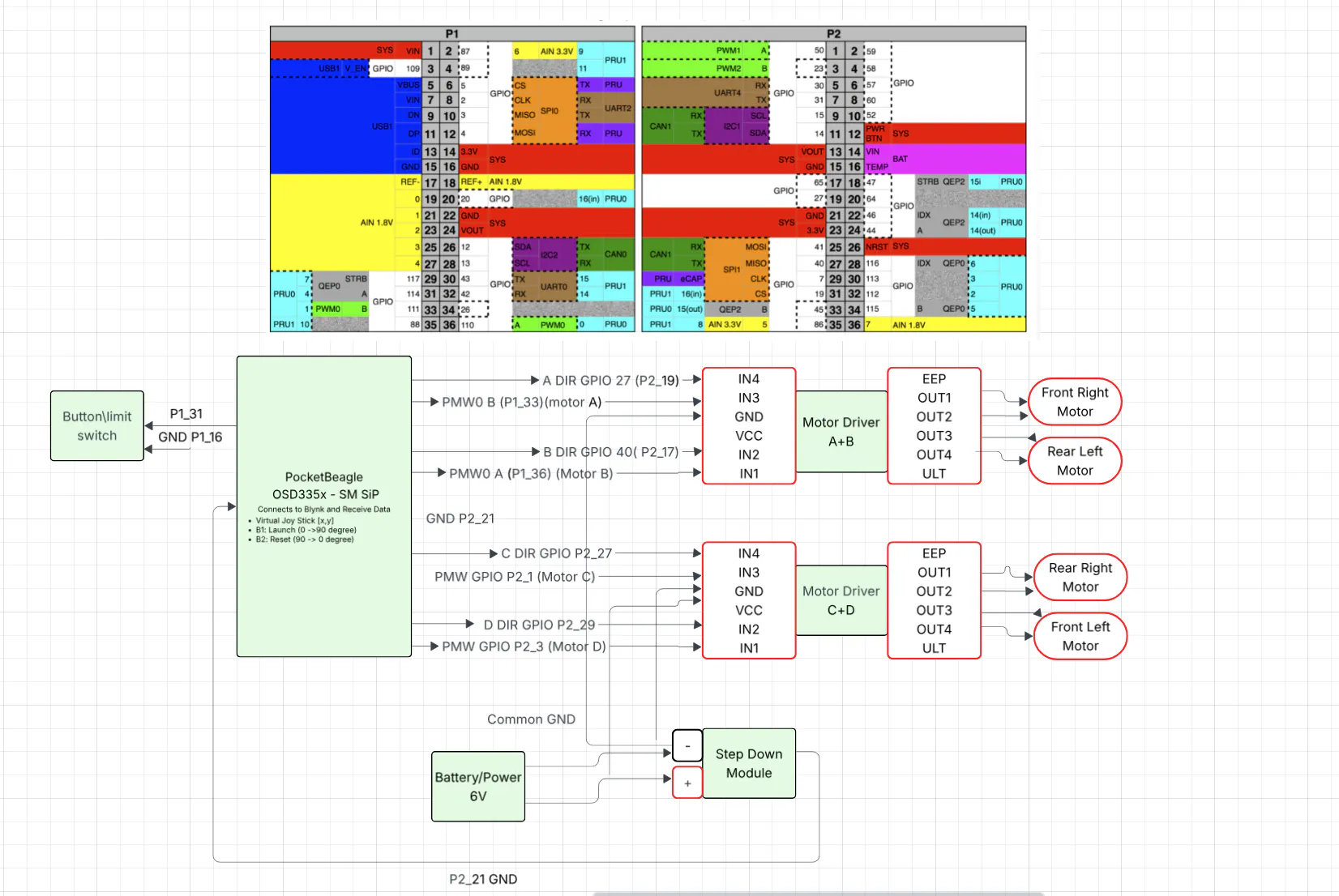
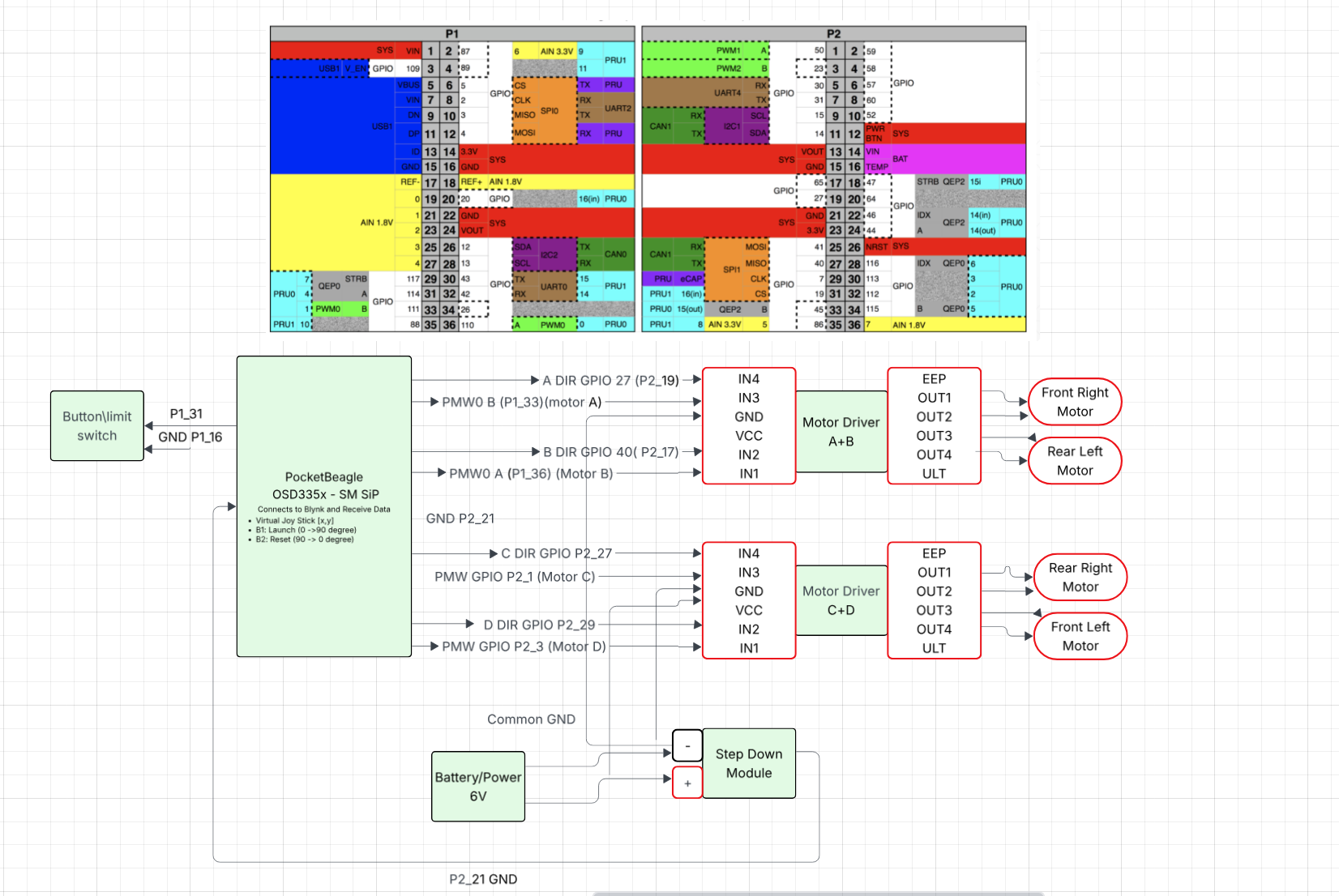
Prep WorkI did have to do some soldering for this project, including the motor drivers, the motors, the step down module and a male connector to the battery pack. I personally enjoyed doing it, especially the motor drivers. Note that when soldering the DC motors, make sure the head of the male wire is not touching the motor at all, or else, it will get heat up and melt into it. I also used a heat gun to heat up some coverage for the wire for the battery wiring so that they are not sticking out. For project like this, I found it helpful to have a detailed system block that includes all the pins' connections. For the motor drivers specially, it will be way easier to code and reference.
Bringing It to LifeTo control the rover, I used the Blynk app on my phone and built a virtual joystick interface instead of relying on a physical controller. The Blynk app generates an authentication token, and the PocketBeagle connects to the internet through a WiFi dongle. Communication takes place either through my phone’s hotspot or through the same private WiFi network. Once connected, joystick input is sent directly to the rover in real time. The first successful wireless test was a major milestone because it showed that the rover could respond immediately without any wired connection.
The system did not work perfectly at first, so development required repeated testing of both hardware and software. I wrote and ran code in Cloud9, creating small test programs to isolate specific issues such as motor wiring, driver response, and network stability. During development, the computer remained connected to the PocketBeagle through USB, but the long-term goal was always to create a fully portable system that could operate independently.
Powering the RoverThe final design is intended to run entirely on battery power. A battery pack supplies power through a step-down module to both the PocketBeagle and the motor driver. This allows the rover to operate without remaining connected to a computer. This involves setting up automatic boot through cloud9. I succeed in setting up the automatic boot but after connecting to the battery pack, unfortunately, the pocketbeagle did not turn on. This might be due to the AA batteries can't supply enough current to boot the PocketBeagle. Thankfully, I have a usb portable charger in handy, (all of them provide 5V output). I used the portable charger to power the pocketbeagle and battery or the motors, and
Safety FeaturesTo make testing safer, I added a physical emergency stop button directly on the car so the rover can be stopped immediately if something goes wrong. The next step is to add the same emergency stop function to the Blynk interface so the system can also be shut down remotely. Blynk also generates token, make sure that the token is not shared in any means!
DemonstrationNext StepsRefine the look of my rover, the 3d printed case it did not fit perfectly, might need to create one by myself. After the basic rover platform is working, I can return to the original idea and begin expanding its capabilities. Planned upgrades include a remote emergency stop in the app, sensors for navigation, and autonomous movement. In the long term, the goal is to develop a working hair tie collection system.
What This Project Taught MeThis project taught me how to break a large idea into manageable steps, debug both hardware and software, and design with real-world use and failure in mind. Most importantly, it showed me that complex systems do not need to be built all at once. The first step is to make something work, then improve it through iteration.
Even though the hair tie launching functionality was not added, my car is still very intrigued.
System Block Diagram


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments