I'm fairly new to Arduino projects, so the wiring diagrams and sample source code from circuit.io were a real life-saver.
My idea is to make a trick candy bowl with a trap bottom that will automatically move away when it senses proximity. For icing on the prank cake, it then plays the "Nanny nanny boo boo!" song mockingly. Once the victim recovers from the surprise/disappointment at the retreating candy and subsequent mocking, the push of a button lets you reset the system for your next friend/mark.
So, getting started, here's my BoM from circuit.io (the most interesting parts of it anyway):
circuit.io BoM
Wiring
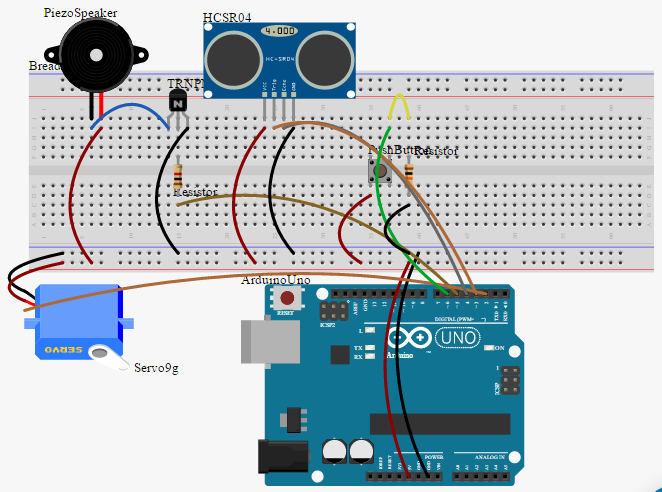
And here is my wiring diagram:
circuit.io Wiring Diagram
Step by step instructions
Following the instructions from circuit.io I ended up with this:
Moved on to the sample code from circuit.io to test everything out. It saved me a lot of time to have ready-made code for testing all my components and my wiring job! Also notice that all my supporting .h and .cpp files that I will need are already included:
circuit.io is rad!!
At this point I used the serial monitor in the Arduino IDE tools and was able to experiment with each component. I noticed that the servo motor was a little jumpy at the beginning and my distance meter was giving odd values, so I decided to make a better ground plane by adding a jumper from the other Arduino Uno ground pin to the other side of the ground rail on the breadboard. This seemed to help but don't accidentally connect the breadboard ground rail to the VIN pin on the Arduino like I did (it was late). Didn't let any magic smoke out but needed a board reset and another round of testing to make sure I didn't cook anything (thankfully I didn't).
Example code was great for testing components, but it wasn't going to make my prank work. In my attached code you can see how I modified the sample code from circuit.io to achieve the behavior I needed. There's also a link to my github repository that includes all the support files that I got from circuit.io.
Now with my basic circuit prototyped and code pretty much done it was time to move on to fabbing my candy bowl, trap door, and enclosure. As cool as it would have been to 3D print this thing, I did most of my construction with cardboard, tape, and hot glue.
Cutting the opening for the bowl
Attached my distance meter over the spot for the candy bowl
My breadboard and Arduino in their cardboard enclosure/servo motor trap assembly stand
Servo-powered trap door
Trap door in place
Everything put together
Videos
So with assembly all done it was time to test. Here is how the trap worked:
Oh no! My Candy?!
And here's how the reset works:
Getting ready for the next victim >:)
Conclusions
So all in all, it's pretty obvious that something is up when you spy candy in a paper bowl recessed in an old shipping box with a sensor on top. Even if the trap is kinda obvious I liked the speed of the servo trap door. BTW, in the videos you can see a USB cable coming out the the box to power it, but it does work with a 9V battery. The one I was using wasn't up to the task when I was taking videos but I tested it later with a fresh battery and everything worked just fine.
It was a fun project and I liked the help of circuit.io to get quickly into prototyping. I'll definitely be going there in the future. Thanks for looking at my project!
// Include Libraries#include"Arduino.h"#include"NewPing.h"#include"PiezoSpeaker.h"#include"Button.h"#include"Servo.h"// Pin Definitions#define HCSR04_PIN_TRIG 3#define HCSR04_PIN_ECHO 4#define PIEZOSPEAKER_PIN_SIG 5#define PUSHBUTTON_PIN_1 6#define SERVO9G_PIN_SIG 2// Global variables and definesunsignedintpiezoSpeakerNNBBLength=6;unsignedintpiezoSpeakerNNBBMelody[]={NOTE_C4,NOTE_C4,NOTE_A3,NOTE_D4,NOTE_C4,NOTE_A3};unsignedintpiezoSpeakerNNBBNoteDurations[]={4,4,4,4,2,4};unsignedintpiezoSpeakerArmedLength=3;unsignedintpiezoSpeakerArmedMelody[]={NOTE_C5,NOTE_C5,NOTE_C5};unsignedintpiezoSpeakerArmedNoteDurations[]={4,4,4};constintservo9gClosedPosition=20;//Starting position - closedconstintservo9gOpenPosition=110;//Trap door open positionconstinttriggerDistance=10;// ConstructorsServoservo9g;NewPinghcsr04(HCSR04_PIN_TRIG,HCSR04_PIN_ECHO);PiezoSpeakerpiezoSpeaker(PIEZOSPEAKER_PIN_SIG);ButtonpushButton(PUSHBUTTON_PIN_1);// define vars for testing menu#define TIMEOUT 10000 //define timeout of 10 seccharmenuOption=0;longtime0;/* This code sets up the essentials for your circuit to work. It runs first every time your circuit is powered with electricity. */voidsetup(){// Setup Serial which is useful for debugging// Use the Serial Monitor to view printed messagesSerial.begin(9600);while(!Serial);// wait for serial port to connect. Needed for native USBSerial.println("start");pushButton.init();servo9g.attach(SERVO9G_PIN_SIG);servo9g.write(servo9gClosedPosition);delay(500);servo9g.detach();}voidloop(){booltriggered=false;boolarmed=true;//Keep checking distance meter - if something close then open servo if not then back to waitwhile(triggered==false){inthcsr04Dist=hcsr04.ping_cm();if((hcsr04Dist!=0)&&(hcsr04Dist<triggerDistance)){triggertrap(hcsr04Dist);triggered=true;armed=false;}else{//Serial.print(F("Distance: ")); Serial.print(hcsr04Dist); Serial.println(F("[cm]")); // print triggered distance for debugdelay(100);}}//Wait for reset signalwhile(triggered==true){boolpushButtonVal=pushButton.read();if(pushButtonVal){resettrap();triggered=false;}else{delay(100);}}//Wait for second button press to signal that the trap is ready to arm againwhile(armed==false){boolpushButtonVal=pushButton.read();if(pushButtonVal){armtrap();armed=true;}else{delay(100);}}}// This section is used to trigger the trap and play musicvoidtriggertrap(inttriggerDistance){//Open servo trapSerial.print(F("Trigger Distance: "));Serial.print(triggerDistance);Serial.println(F("[cm]"));// print triggered distance for debugservo9g.attach(SERVO9G_PIN_SIG);// 1. attach the servo to correct pin to control it.servo9g.write(servo9gOpenPosition);// 2. turns servo to open position. delay(1000);// 3. wait 100 millisecondsservo9g.detach();// 4. detach the servo//Play Music- The Speaker will play the Nanny Nanny Boo Boo tune x2:PpiezoSpeaker.playMelody(piezoSpeakerNNBBLength,piezoSpeakerNNBBMelody,piezoSpeakerNNBBNoteDurations);delay(250);piezoSpeaker.playMelody(piezoSpeakerNNBBLength,piezoSpeakerNNBBMelody,piezoSpeakerNNBBNoteDurations);delay(500);}voidresettrap(){//Close servo trapservo9g.attach(SERVO9G_PIN_SIG);// 1. attach the servo to correct pin to control it.servo9g.write(servo9gClosedPosition);// 2. turns servo to closed position.delay(1000);// 3. wait 100 millisecondsservo9g.detach();// 4. detach the servo}voidarmtrap(){//Indicate trap armedpiezoSpeaker.playMelody(piezoSpeakerArmedLength,piezoSpeakerArmedMelody,piezoSpeakerArmedNoteDurations);delay(500);}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments