

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
The history of Radio Controlled (RC) model vehicle may be about 100 years. It's technology is mature but the cost is not popular. A bluetooth controlled Arduino with Android smartphone system(double A) is an inexpensive solution.
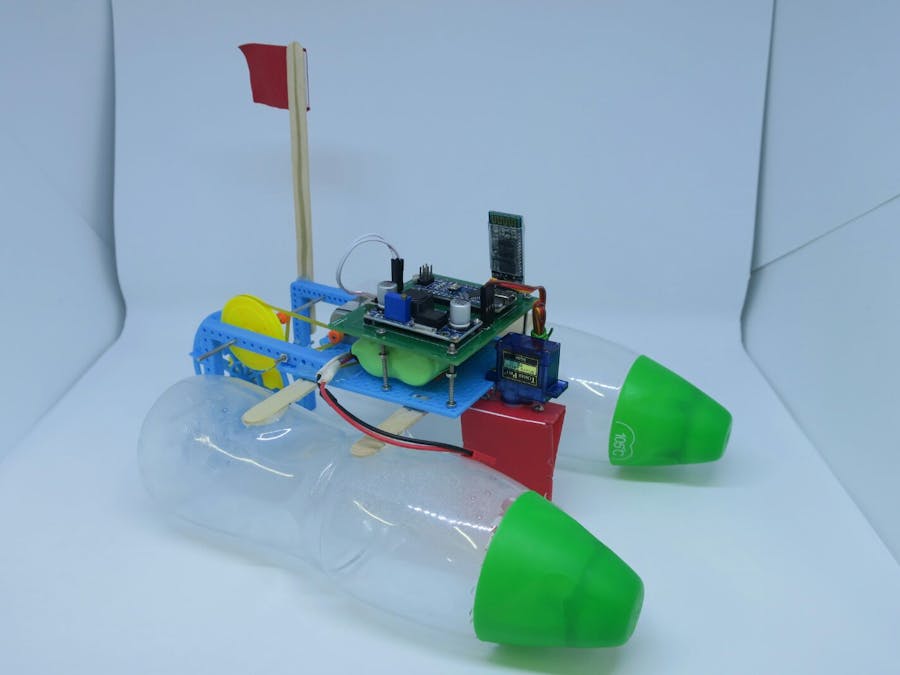
The system was embedded into a simple motor toy boat model set and overall budget is less than USD 10. I shared this project with students in my school and totally 6 BT boats were made before the Open Day. As beginners, my students spent about 20 hours to complete the whole project and earned an unforgettable experience on Arduino project.
Mechanical Part
The boat model sets were purchased on Taobao online shopping website. All mechanical parts were provided in a kit-set, expect a rudder and two plastic bottles. I let them to choose their own bottles and the rudder, which can be shaped in other form, is prepared for them thru' a laser cutter.
Electronic Part and Apps in Ardroid
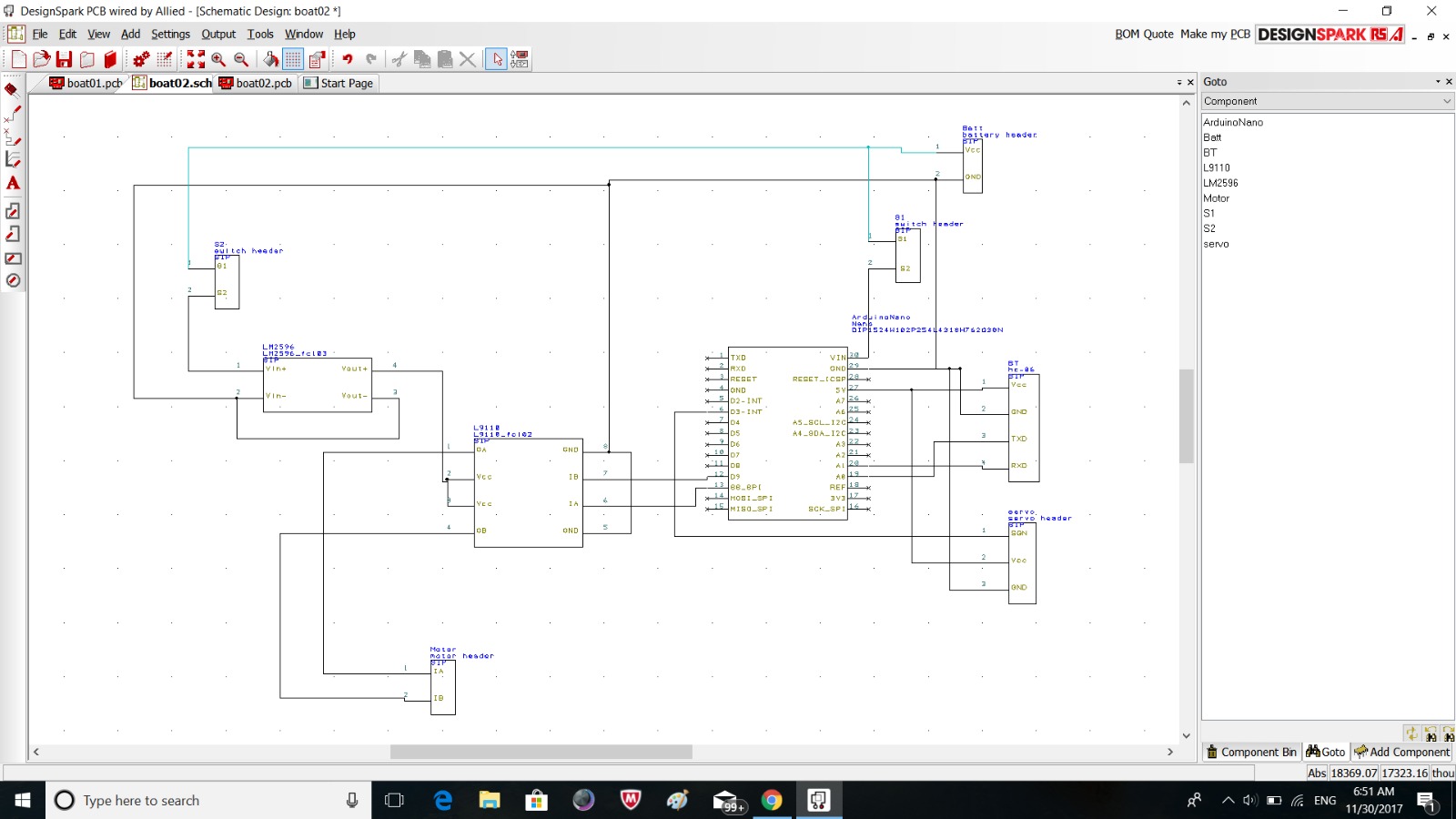
We chose Arduino nano as its small size. Motor drive L9110 is used and the simple motor is connected to the wheel of the boat for movement. For simplicity, it can move forward or backward with constant speed in this version. The rudder is controlled by a mini servo, and the Arduino was connected to a Android thru' a bluetooth module HC-06. The apps is created by MIT Appinventor.
Education Highlight
For educational purpose, some features of this boat are highlighted here:
- Floating, balancing(centre of gravity) or even fluid dynamic are relevant academic topics can be taught.
- Various coding skills are used in this project, such as servo motor, simple motor with motor drive and communication between smartphone and arduino thru' BT.
- The framework of the boat is made of plastic with holes, students can build up in their own style.
- A curriculum is set for whole project
P.S.:
The program of apps of Android is linked below:




{kind=link}
Comments