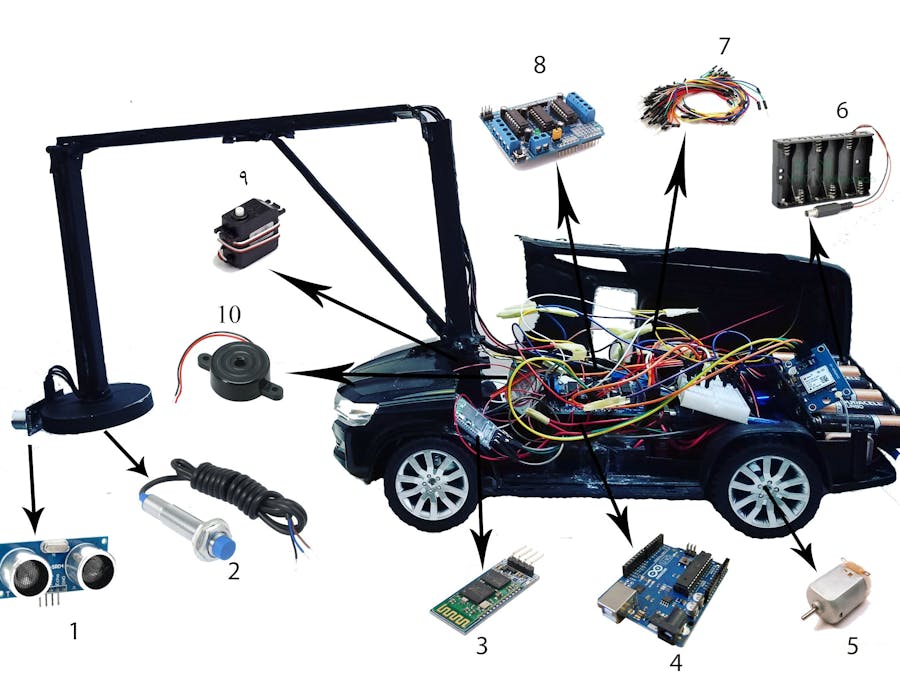
my research is about developing a robot to find mines bombs, it is called (Smartphone Controlled Arduino 2WD Robot Car to detect mine bomb).
The mines in the mine’s fields make the life of the people that searches for the mine in real danger, sometimes they sacrifice their life to find the mines, but if they use our robot, just the robot crashed in the danger situation.
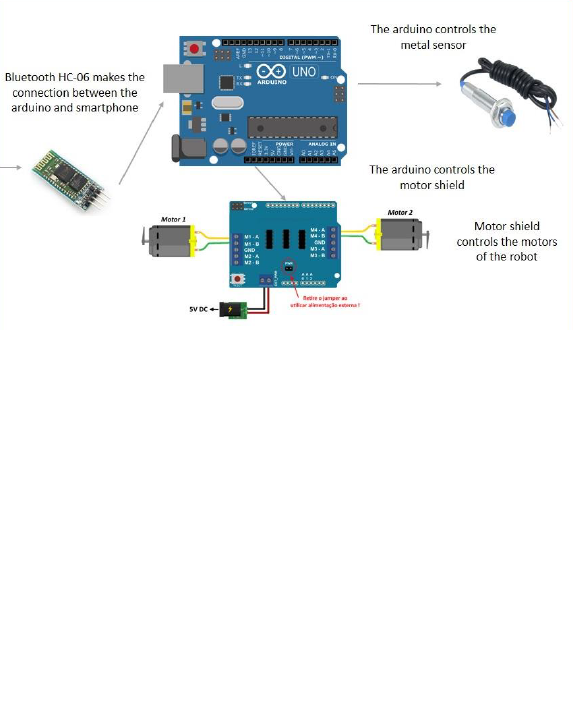
The robot programmed by (C) language, and controlled by smartphone, the robot can warn the user by speaker when it finds the mine, we used metal sensor to find the mines, because every mines contain some iron when it is created, by that iron we can find the mines and avoid other sacrifices for finding the mine bombs.














{kind=link}
Comments