Final project for Embedded Systems at John Brown University.
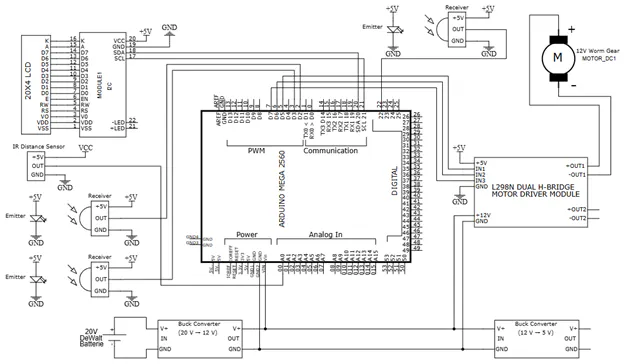
This project involved the design and implementation of an automated golf ball dispensing and swing-speed measurement system using an Arduino Mega microcontroller. The system dispenses a single golf ball when a user waves a hand or golf club in front of the device and measures the swing speed of the club using Infrared break-beam sensors. Real-time feedback, including detected distance and calculated swing speed, is displayed on a 20×4 character LCD. The system is powered by a 20 V rechargeable lithium-ion battery with multiple regulated voltage rails to support motors, sensors, and logic circuitry.
The primary challenge addressed by this project was the reliable integration of multiple sensors, actuators, and timing-sensitive measurements into a single embedded system. The system was required to operate autonomously, prevent accidental multiple ball releases, accurately measure fast-moving objects, and remain responsive despite electrical noise generated by motors and servos. This report describes the system architecture, implementation methods, timing behavior, experimental results, and lessons learned during development.
Link to video: https://photos.app.goo.gl/dbwQT2i5GASjvyNb8
















{kind=link}
Comments