In my Physical Computing Lab class, our final project covered the theme of struggle, which we had to portray while working with a partner from the sculpture class. To illustrate the theme my partner and I decided to specifically focus on the topic of homelessness. The project represents a Chicago viaduct in which a person is living in a tent below the highway which contains a light that turns on and flashes to show a person moving within the tent as one moves within a home. There is a highway above the tent to show as people drive by above they fail to notice someone is without a home.
I needed to integrate an online data source to trigger the physical behavior of our project based on real data. As the number of homeless people is hard to quantify, and finding an API proved difficult I took a different approach. Within the Chicago Data Portal there is an API that provides information on service requests specifically when people within the city report abandoned buildings. Within the API there is information on wether the abandoned building is vacant or occupied and if it's being occupied by homeless people, children, or gangs. There is also information about the location of the building such as the police district it is located within. I decide to use the API so that if the building is being occupied and it's police district lies within the north side of Chicago the light within the tent flashes white and if it's police district lies within the south side of Chicago the light within the tent flashes red. I felt this added another deeper meaning to differentiate between the two parts of Chicago eventually it would come to show that there are more homeless people within the south side of Chicago as the light flashes red more often.
https://drive.google.com/drive/folders/1IpXQ0K55ib6PLSF9ewsMgO0HOtUFt5Ye?usp=sharing
Above is a link to all videos from this project. Video 1 and 2 are the final results of the project, Video 1 shows a building pulled from the North side (white light) and Video 2 shows a building pulled form the South side (red light). I suggest watching these videos to gain some context and understanding of the project.
PullingData
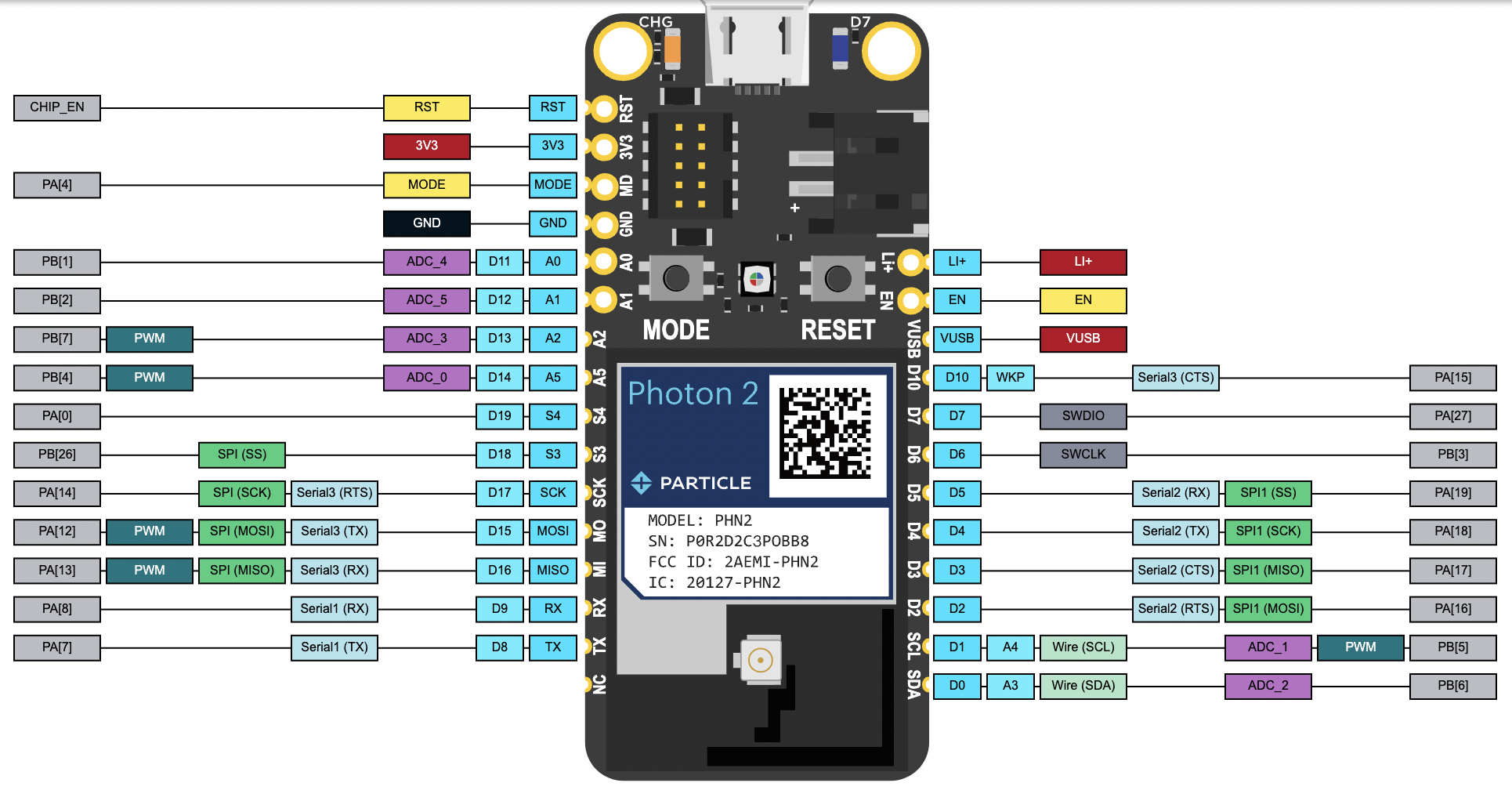
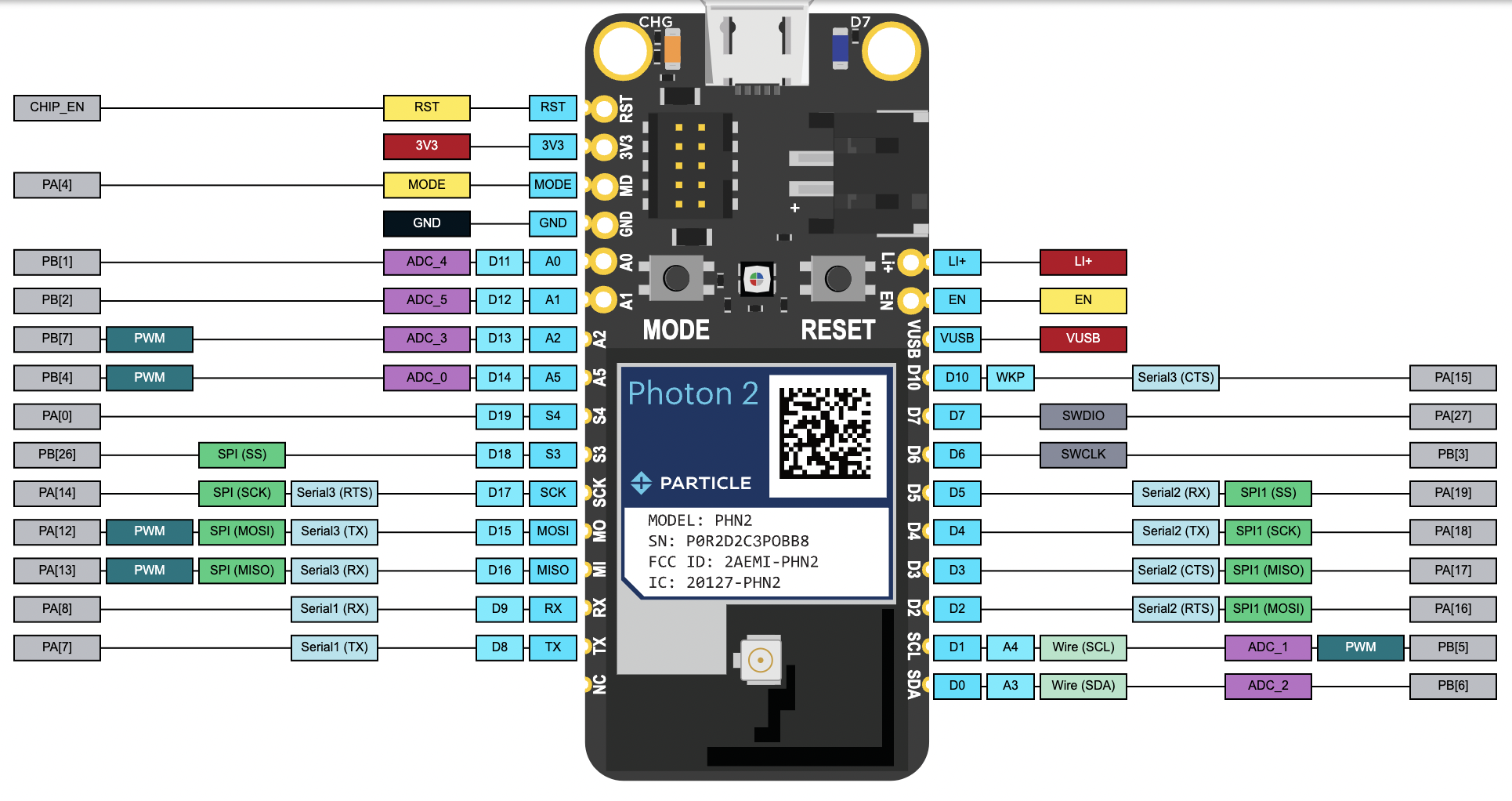
To get the data for this project, I used the Chicago Data Portal was used, specifically the API regarding service requests about abandoned buildings. To "pull" data from the Chicago Data Portal, I created an integration in the Particle IDE console in the custom webhook section. Video 3 shows the initial stages of my project where I began iterating through the API and pulling the police district and triggering an LED and servo.
ComponentsEventually I switched to using a strip of 4 NeoPixel LED lights to control the color change depending on the police district.
I used the continuous servo to show a person moving within the tent by attaching a cardboard cutout of a person that my partner made to the top of the servo.
Continuous Servo with Cardboard Person Cutout
I used the 180 degree servo to move the linear actuator back and forth and attached two cardboard cars to each end that my partner sculpted.
180 degree Servo with linear actuator and cars attached to each end
Before actually connecting the electronics to the sculpture project, I had to attach the electronics to a protoboard via soldering and dupont jumper wires (female-to-male or male-to-male). Finally to attach everything together I used a lot of tape and cardboard to ensure everything was secure. The link below shows an image of the final protoboard top view and the final protoboard from the bottom view to show the soldering.




















{kind=link}
Comments