Water is such an important resource in our life that a human being cannot even live a day without water. But still we humans cause so much wastage of this precious resource. We waste more than we save! Now its time we try to save the life giving resource.
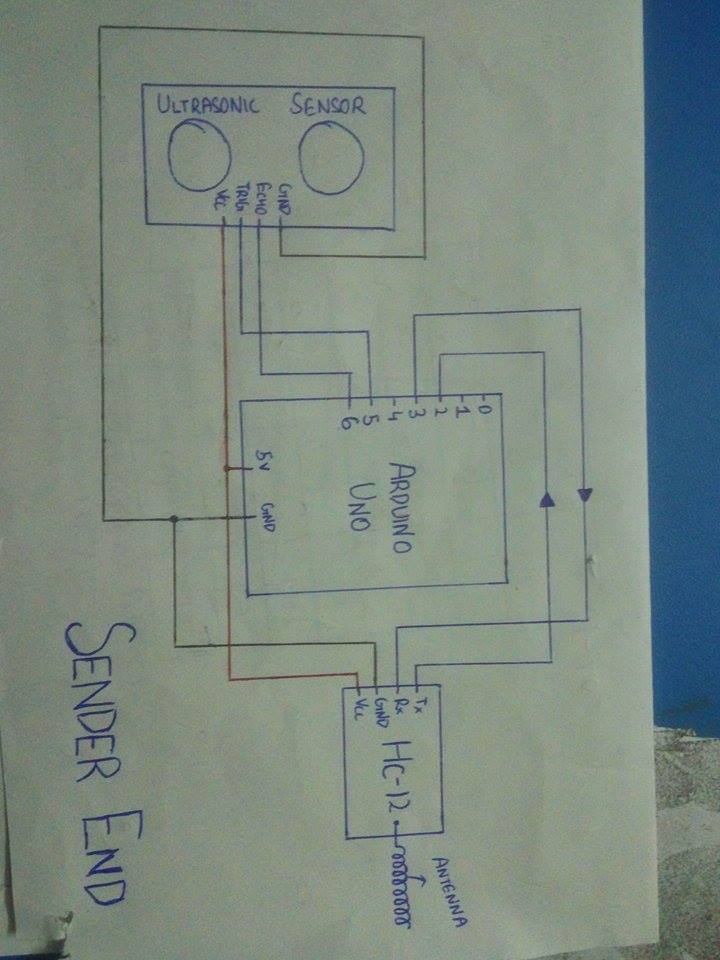
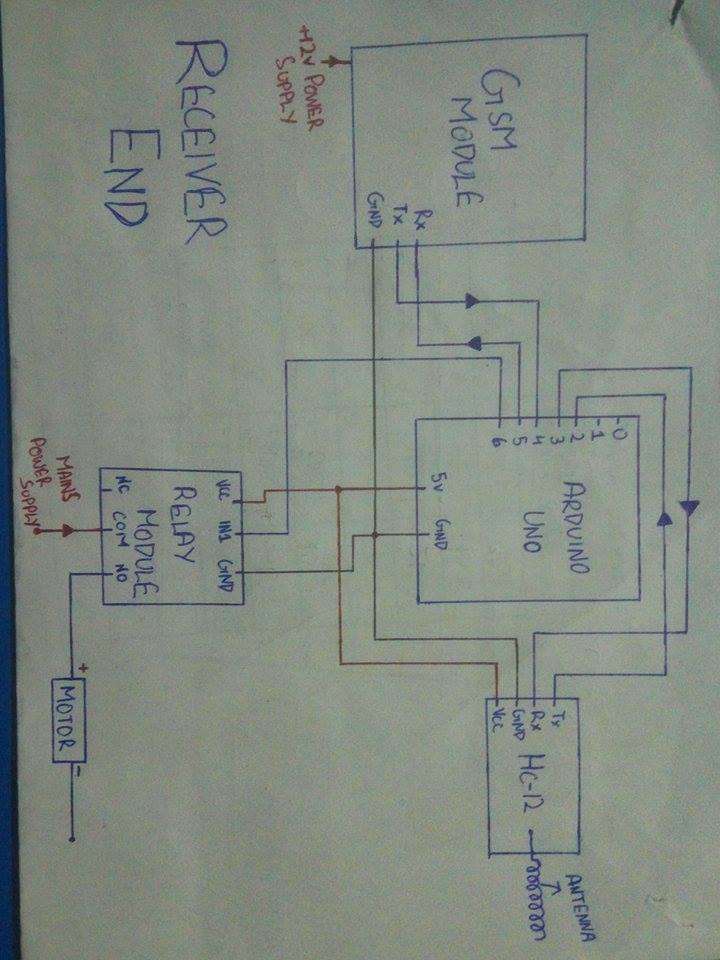
Many times it happens that we forget to turn off the water pump after the water tank gets filled. This leads to wastage of a great amount of water. Poseidon is an easy to make wireless Water Overflow control system which automatically switches off the water pump when the water in the tank reaches a certain level and switches on the water pump when the tank gets empty. Controlling of the motor is done wirelessly using the HC-12 module which has a range of about 1km.
Not only this, it also gives you call as a notification after the work is done.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
{kind=link}
Comments