


Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
"Tinkering away, I recently picked up a basic drone and immediately started itching to push its limits. Since I have a few
ToF (Time-of-Flight) sensors lying around gathering dust, I’ve decided to put them to work. Enter project Drone-noble: my mission to transform a budget flyer into a more capable, sensor-rich machine.
Things to consider:
1. The Controller Brain
A basic drone's stock flight controller (FC) is usually a closed loop. To use your ToF sensors, you’ll likely need to swap the internals for an open-source flight controller like the Pixhawk series or a Holybro Kakute that runs ArduPilot or PX4 Autopilot. These platforms have built-in support for "Rangefinders" (ToF).
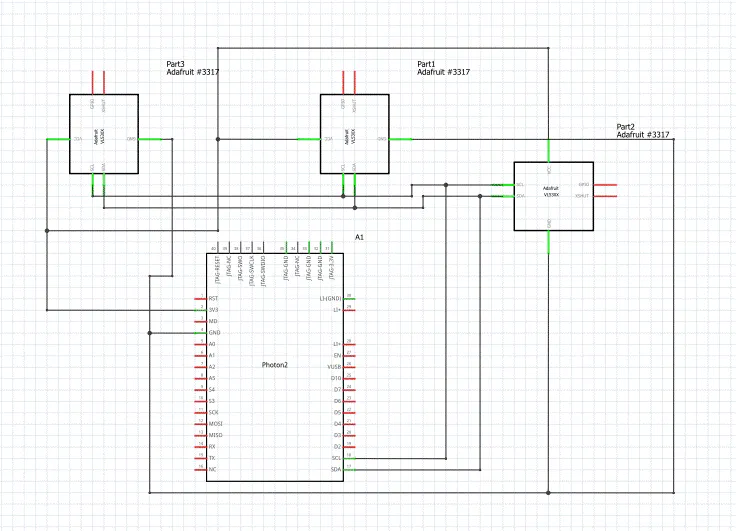
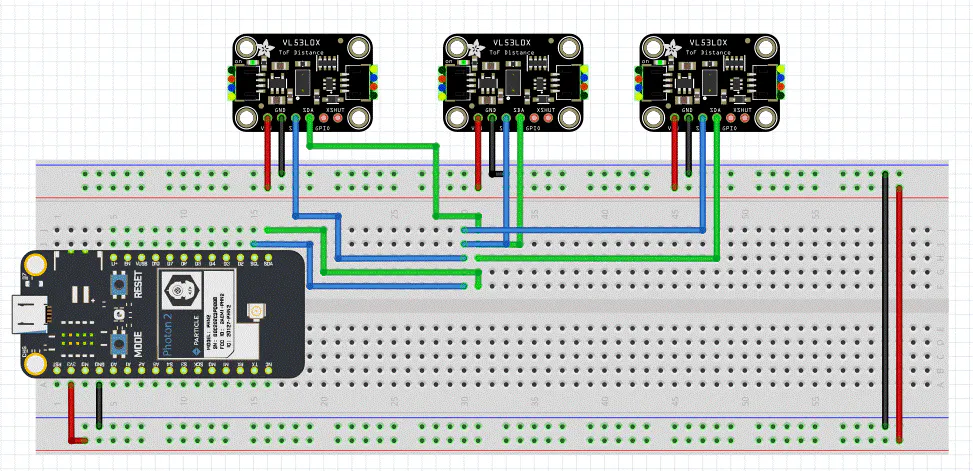
2. Wiring the ToF Sensors
Most hobbyist ToF sensors (like the VL53L1X) communicate via I2C or Serial (UART).
- Altitude Hold: Point one downward for precision landing and "indoor" terrain following where GPS is spotty.
- Obstacle Avoidance: Point them forward or sideways. You can find integration guides on the ArduPilot Wiki for Proximity Sensors.
3. Power & Payload
4. Expansion Tools
Key Considerations
- Regulations: In the U.S., commercial use of drones requires FAA Part 107 certification, and most drones over 250g must be registered. Always check local airspace restrictions before flying.
- Portability: Many modern drones, even pro-level models, feature foldable designs for easy transport, which is especially beneficial for travel and on-location shoots. I anticipate needing to design around the foldable capabilities of the drone.
- Autonomous Features: Advanced obstacle avoidance (including LiDAR and omnidirectional sensors), intelligent flight modes, and precise subject tracking are now standard on many high-end and mid-range drones, making flying safer and more creative.
I want to utilize bluefruit.io and have information span to my phone utilizing the app. My plan is to have a sensor at the bottom of the drone, and one on the front and back of the drone.






{kind=link}
{kind=link}
Comments