OverviewCats are well-beloved house pets. They are both friendly and relatively low-maintenance. The problem is their activity rarely follows a 9 to 5 schedule. Keeping them outdoors all day exposes them to strays/wildlife/cars and clutters your porch with their trophies. The Cat Caddie was created as a solution for the busy cat owner.
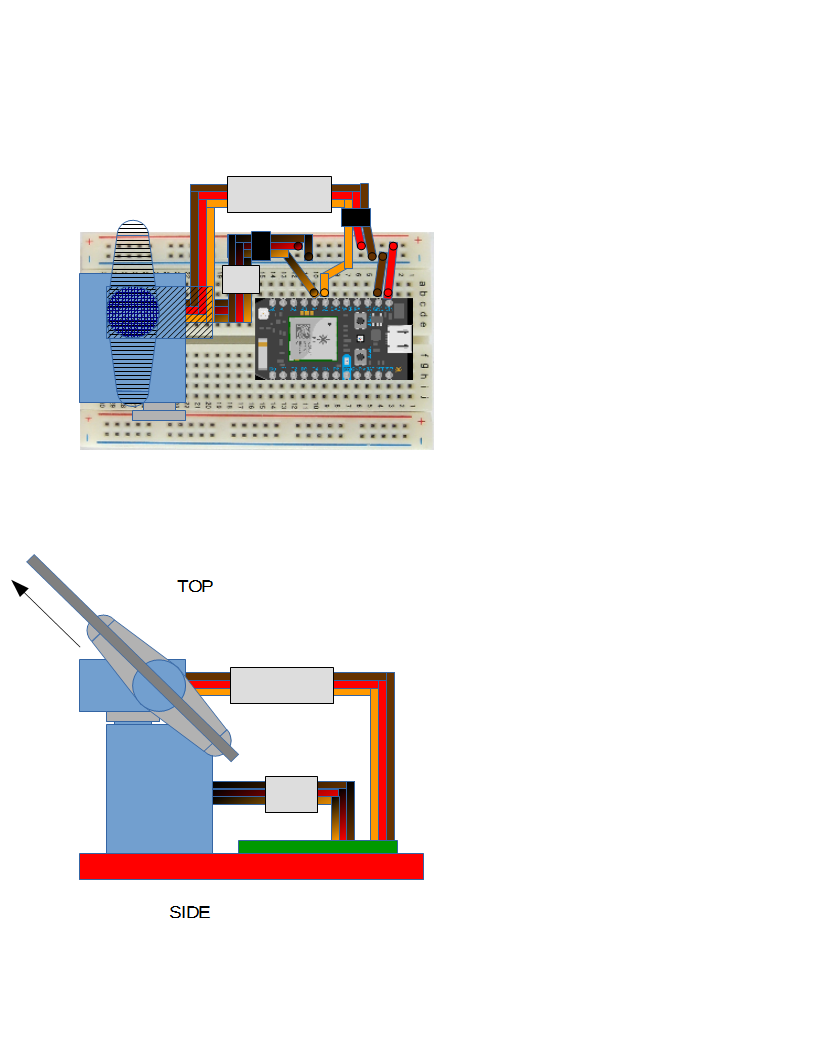
It is composed of a two servos on a pan-and-tilt frame actuating a feather wand. A Particle Photon controls the servo routine, and the device is triggered by a motion sensor on a separate photon. The motion sensor has a lag time to allow for the routine to play out and the cat to leave - 10 seconds, appropriately.
I have included a fairly slow one-axis routine for lack of testing and proper mounting materials. Simultaneous axis operation is possible but tricky as the assembly is liable to tip over at a vertical angle below 30 degrees. Actual cat use will require more structural support, if not stronger servos.
Set-up instructions:1. Register two Particle Photons as indicated in the documentation: https://docs.particle.io/guide/getting-started/intro/core/
Either download Particle Dev or use Particle IDE to write and flash firmware. The Photons can be powered via laptop/desktop USB or power bricks. Each requires 4.8 V DC.
2. Assemble the pan and tilt servo kit, mount it to a stable surface, and attach the cat wand to the servo arm. For the last step, I used a combination of duct tape, wooden skewers, and a lamp bracket - consider a more elegant solution. Screw clamps or collars may be useful.
3. Flash "Dual Axis Test" to servo Photon to check arm positioning and range.
4. Adjust angles and delays in "Wand Routine", then flash it to servo Photon.
5. Assemble motion sensor and check photoresistor readings using the Tinker mobile App, adjusting beamThreshold level in "Motion Sensor" as needed.
6. Flash "Motion Sensor" to the other Photon.
7. Test, adjust delay under "Motion Sensor" as needed.















{kind=link}
Comments