




Everyone can build a submarine. To assemble this design from a tool, only a screwdriver and a hot glue gun were required. The design consists of several modules:
- module with electronics
- 2 cylinders for storage of compressed air
- 2 ballast tanks (bow and stern)
- 2 capacities for battery
- 2 tanks for ballast to adjust the buoyancy.
As propulsors, 4 micropumps for water were used.
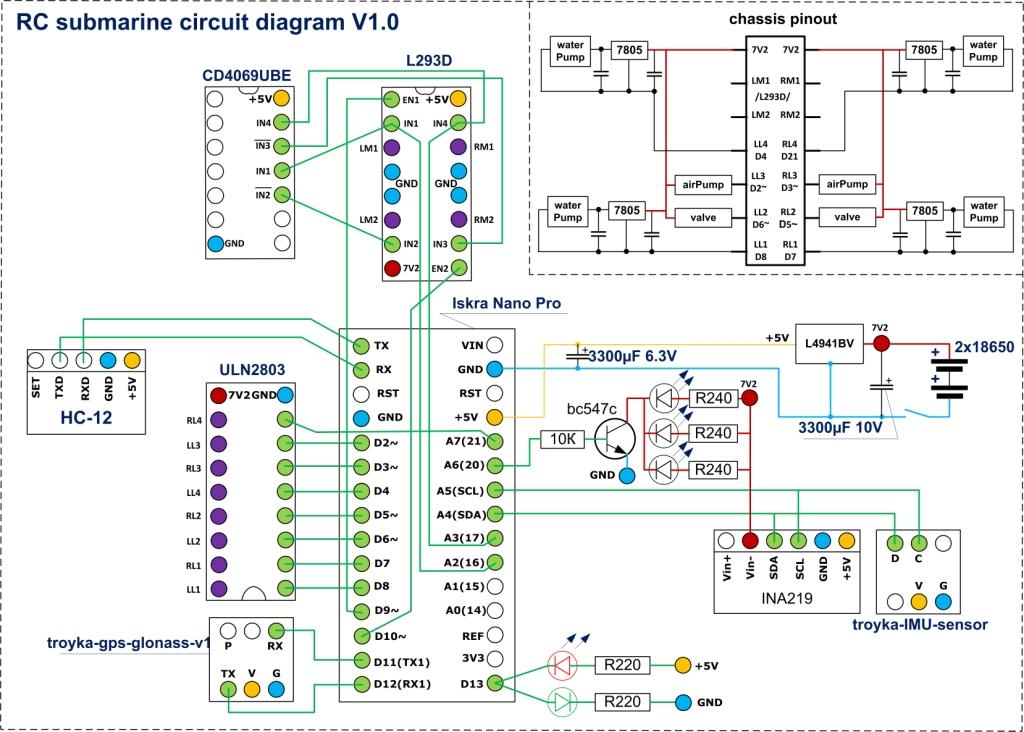
Schematic diagram:
Universal Remote Control Arduino
Electronics is assembled on the basis of the Russian version of the Arduino board called Iskra Nano Pro. The board is made on the AT Mega 328PB microcontroller. Unlike the original Arduino board and its Chinese copies, the board has a 2nd hardware UART on board, which allows you to connect the gps module to determine the coordinates of the submarine using satellite navigation and it allows you to use all the analog pins as digital ones - so I have 2 free pins for connecting sensors. In the future, the submarine plans to install 2 engines with screws. To save pins (usually 6 pins are required to connect the L293D driver), the CD4069UBE logic chip is used. The battery charge is monitored by the INA219 current sensor. The IMU sensor allows you to detect tilt angles in three axes. (2 axes will be used - one for the trim angle and the second for automatic heading). Power is supplied from a separate stabilizer L4941BV with a minimum difference between input and output voltage, which allows for stable operation of the equipment. For radio communication, the HC-12 radio module is used, which perfectly catches a signal even under water. 4 pumps, 2 microcompressors and 2 solenoid valves are powered from the Darlington ULN2803 assembly.
Open water tests, the process of immersion, ascent and the operation of electronics under water can be seen in this video:
#include "Arduino.h"
#define SetBit(reg, bita) reg |= (1<<bita)
#define ClearBit(reg, bita) reg &= (~(1<<bita))
#define InvBit(reg, bita) reg ^= (1<<bita)
#define BitIsSet(reg, bita) ((reg & (1<<bita)) != 0)
#define BitIsClear(reg, bita) ((reg & (1<<bita)) == 0)
// Arduino Duemilanove, Diecimila, and NG
#if defined(__AVR_ATmega168__) || defined(__AVR_ATmega328P__) || defined(__AVR_ATmega328__)
#define LedPinOut() DDRB |= (1<<5)
#define LedPinOn() PORTB |= (1<<5)
#define LedPinOFF() PORTB &= (~(1<<5))
// Arduino Mega
#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__)
#define LedPinOut() DDRB |= (1<<7)
#define LedPinOn() PORTB |= (1<<7)
#define LedPinOFF() PORTB &= (~(1<<7))
// Leonardo
#elif defined(__AVR_ATmega32U4__)
#define LedPinOut() DDRC |= (1<<7)
#define LedPinOn() PORTC |= (1<<7)
#define LedPinOFF() PORTC &= (~(1<<7))
// anything else
#else
#error "Board not supported"
#endif
#if defined(Serial_0) //UART0
#if defined(UBRRH) && defined(UBRRL)
#define UDRn UDR
#define UBRRnH UBRRH
#define UBRRnL UBRRL
#define UCSRnA UCSRA
#define UCSRnB UCSRB
#define UCSRnC UCSRC
#else
#define UDRn UDR0
#define UBRRnH UBRR0H
#define UBRRnL UBRR0L
#define UCSRnA UCSR0A
#define UCSRnB UCSR0B
#define UCSRnC UCSR0C
#endif
#if defined(USART_RX_vect)
#define BYTEin USART_RX_vect
#elif defined(USART0_RX_vect)
#define BYTEin USART0_RX_vect
#elif defined(USART_RXC_vect)
#define BYTEin USART_RXC_vect //ATmega8
#else
#error "Board not supported"
#endif
#endif //UART0
#if defined(Serial_1) //UART1
#define UDRn UDR1
#define UBRRnH UBRR1H
#define UBRRnL UBRR1L
#define UCSRnA UCSR1A
#define UCSRnB UCSR1B
#define UCSRnC UCSR1C
#if defined(UART1_RX_vect)
#define BYTEin UART1_RX_vect
#elif defined(USART1_RX_vect)
#define BYTEin USART1_RX_vect
#else
#error "Board not supported"
#endif
#endif //UART1
#if defined(Serial_2) //UART2
#define UDRn UDR2
#define UBRRnH UBRR2H
#define UBRRnL UBRR2L
#define UCSRnA UCSR2A
#define UCSRnB UCSR2B
#define UCSRnC UCSR2C
#define BYTEin USART2_RX_vect
#endif //UART2
#if defined(Serial_3) //UART3
#define UDRn UDR3
#define UBRRnH UBRR3H
#define UBRRnL UBRR3L
#define UCSRnA UCSR3A
#define UCSRnB UCSR3B
#define UCSRnC UCSR3C
#define BYTEin USART3_RX_vect
#endif //UART3
#if !defined(TXC0)
#if defined(TXC)
// Some chips like ATmega8 don't have UPE, only PE. The other bits are
// named as expected.
#if !defined(UPE) && defined(PE)
#define UPE PE
#endif
// On ATmega8, the uart and its bits are not numbered, so there is no TXC0 etc.
#define TXC0 TXC
#define RXEN0 RXEN
#define TXEN0 TXEN
#define RXCIE0 RXCIE
#define UDRIE0 UDRIE
#define U2X0 U2X
#define UPE0 UPE
#define UDRE0 UDRE
#elif defined(TXC1)
// Some devices have uart1 but no uart0
#define TXC0 TXC1
#define RXEN0 RXEN1
#define TXEN0 TXEN1
#define RXCIE0 RXCIE1
#define UDRIE0 UDRIE1
#define U2X0 U2X1
#define UPE0 UPE1
#define UDRE0 UDRE1
#else
#error No UART found in HardwareSerial.cpp
#endif
#endif // !defined TXC0
#include "Arduino.h"
#include "UartAndPinConfig.h"
const uint8_t transmStart = 129; //
const uint8_t transmEnd = 130; //
const uint8_t receiverStart =254; //
const uint8_t receiverEnd = 255; //
//
volatile uint32_t Serial34bSendTimeOUT;
//
volatile uint32_t Serial34bTimeCore = 0;
// true / false
volatile boolean tTimeOut = true;
//
volatile uint8_t tErrTime = 0;
//
volatile uint8_t tErrCRC = 0;
//
volatile uint8_t BYTEinCount = 0;
//
volatile uint8_t inUart_arr[32];
ISR (TIMER0_COMPA_vect) {
Serial34bTimeCore ++;
if (Serial34bTimeCore > Serial34bSendTimeOUT) { //
Serial34bTimeCore = 0;
if (tTimeOut) { // / !!!
tTimeOut = false;
// UART
uint8_t uart_arr[32];
for (uint8_t i = 0; i <= 31; i++) uart_arr[i]=0;
// b8_arr[28];
uint8_t b8_arr[28];
//
b8_arr[0] = 0;
for (uint8_t i = 1; i <= 27; i++) b8_arr[i] = transm_arr[i-1];
//
int8_t uartCount = 0;
for (uartCount = 27; uartCount >= 0; uartCount--) {
if (b8_arr[uartCount] != 0) break; // uartCount
}
if (uartCount != -1) { // -
//
//
uint16_t crc16 = 0;
uint8_t crc8 = 0;
for (uint8_t i = 1; i <= uartCount; i++) crc16 = crc16 + b8_arr[i] * 44111;
crc8 = crc16 & 255;
b8_arr[0] = crc8;
// 8- 7-
uint8_t k = 0;
uint8_t q = 1;
for (uint8_t j = 0; j <= 24; j=j+8) { // 0, 8, 16, 24
for (uint8_t i = k; i <= k+6; i++) { // 0...6 / 7...13 /14...20 / 21...27 /
uart_arr[i+q] = b8_arr[i];
uart_arr[i+q] &= B01111111;
b8_arr[i] &= B10000000;
uart_arr[j] |= b8_arr[i];
uart_arr[j] >>= 1;
} // 0...6 / 7...13 /14...20 / 21...27 /
if (uartCount<j) break; //
uartCount ++;
k = k + 7;
q = q + 1;
} // 0, 8, 16, 24
} // UART uart_arr[32]
//
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = receiverStart;
// uart_arr[32]
for (int8_t i = 0; i <= uartCount; i++) {
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = uart_arr[i];
}
//
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = receiverEnd;
} else { // transmTOUT = false;
//
tTimeOut = true;
//
tErrTime++;
//
LedPinOFF();
}
} //
} //
ISR (BYTEin) {
// !!!
uint8_t dat = 0;
dat = UDRn;
if (transmStart == dat){ //
BYTEinCount = 0;
for (uint8_t i = 0; i <= 31; i++) inUart_arr[i] = 0; // inUart_arr[32]
return;
}
if (transmEnd == dat){ //
if (BYTEinCount == 0) { //
for (uint8_t i = 0; i <= 26; i++) receiv_arr[i] = 0; //
Serial34bTimeCore = 0; //
LedPinOn(); // -
tTimeOut = true; //
return;
} else {
uint8_t b8_arr[28]; //
for (uint8_t i = 0; i <= 27; i++) b8_arr[i] = 0; //
//
uint8_t k = 0;
uint8_t q = 1;
for (uint8_t j = 0; j <= 27; j=j+7) { // 0, 7, 14, 31
for (uint8_t i = j; i <= j+6; i++) { // 0...6 / 7...13 /14...20 / 21...27 /
b8_arr[i] = inUart_arr[k];
b8_arr[i] <<= (7+j-i);
b8_arr[i] &= B10000000;
b8_arr[i] |= inUart_arr[i+q];
} // 0...6 / 7...13 /14...20 / 21...27 /
k = k + 8;
q = q + 1;
} // 0, 7, 14, 31
//
//
uint16_t crc16 = 0;
for (int i = 1; i <= 27; i++) crc16 = crc16 + b8_arr[i] * 44111;
uint8_t crc8 = 0;
crc8 = crc16 & 255;
//
if (b8_arr[0] == crc8) {
// !!!
for (int i = 0; i <=26; i++) receiv_arr[i] = b8_arr[i+1];
//
LedPinOn();
//
Serial34bTimeCore = 0;
//
tTimeOut = true;
} else {
//
LedPinOFF();
//
tErrCRC++;
}
}
return;
}
//
inUart_arr[BYTEinCount] = dat;
BYTEinCount++;
} // - !!!
void startTransmitter (uint32_t baudRate, uint32_t timeSend) {
// !!!
uint16_t ubrr = 0;
if (baudRate == 115200) ubrr = 8;
else ubrr = 16000000/16/baudRate-1;
// !!!
UBRRnH = (unsigned char)(ubrr>>8);
UBRRnL = (unsigned char)ubrr;
//
SetBit(UCSRnB, TXEN0);
//
SetBit(UCSRnB, RXEN0);
//
SetBit(UCSRnB, RXCIE0);
// 8 data 1 stop bit
SetBit(UCSRnC, 1);
SetBit(UCSRnC, 2);
//
Serial34bSendTimeOUT = timeSend;
OCR0A = 0xA0; //
SetBit(TIMSK0, OCIE0A); //
// PIN 13
LedPinOut();
//
for (uint8_t i = 0; i <= 26; i++) transm_arr[i] = 0;
for (uint8_t i = 0; i <= 26; i++) receiv_arr[i] = 0;
}
#include "Arduino.h"
#include "UartAndPinConfig.h"
const uint8_t transmStart = 129; //
const uint8_t transmEnd = 130; //
const uint8_t receiverStart =254; //
const uint8_t receiverEnd = 255; //
//
volatile uint32_t Serial34bSendTimeOUT;
//
volatile uint32_t Serial34bTimeCore = 0;
// -
volatile boolean transmTOUT = true;
//
volatile uint8_t BYTEinCount = 0;
//
volatile uint8_t inUart_arr[32];
//
volatile uint8_t rErrTime = 0;
//
volatile uint8_t rErrCRC = 0;
ISR (TIMER0_COMPA_vect) {
Serial34bTimeCore ++;
if (Serial34bTimeCore > Serial34bSendTimeOUT) { //
Serial34bTimeCore = 0; //
LedPinOFF(); // -
rErrTime ++; //
}
}
ISR (BYTEin) { //
uint8_t dat = 0; // !!!
dat = UDRn;
if (receiverStart == dat){ //
BYTEinCount = 0;
// inUart_arr[32]
for (uint8_t i = 0; i <= 31; i++) inUart_arr[i] = 0;
return;
}
if (receiverEnd == dat){
//
uint8_t b8_arr[28];
//
for (uint8_t i = 0; i <= 27; i++) b8_arr[i] = 0;
//
uint8_t k = 0;
uint8_t q = 1;
for (uint8_t j = 0; j <= 27; j=j+7) { // 0, 7, 14, 31
for (uint8_t i = j; i <= j+6; i++) { // 0...6 / 7...13 /14...20 / 21...27 /
b8_arr[i] = inUart_arr[k];
b8_arr[i] <<= (7+j-i);
b8_arr[i] &= B10000000;
b8_arr[i] |= inUart_arr[i+q];
} // 0...6 / 7...13 /14...20 / 21...27 /
k = k + 8;
q = q + 1;
} // 0, 7, 14, 31
//
//
uint16_t crc16 = 0;
for (int i = 1; i <= 27; i++) crc16 = crc16 + b8_arr[i] * 44111;
uint8_t crc8 = 0;
crc8 = crc16 & 255;
//
if (b8_arr[0] == crc8) {
// !!!
for (int i = 0; i <=26; i++) transm_arr[i] = b8_arr[i+1];
//
LedPinOn();
//
Serial34bTimeCore = 0;
} else {
//
LedPinOFF();
//
rErrCRC++;
}
// receiv_arr [27] !!!!
// UART
uint8_t uart_arr[32];
for (uint8_t i = 0; i <= 31; i++) uart_arr[i]=0;
// b8_arr[28];
b8_arr[0] = 0;
//
for (uint8_t i = 1; i <= 27; i++) b8_arr[i] = receiv_arr[i-1];
//
int8_t uartCount = 0;
for (uartCount = 27; uartCount >= 0; uartCount--) {
if (b8_arr[uartCount] != 0) break; // uartCount
}
if (uartCount != -1) { // -
//
//
crc16 = 0;
crc8 = 0;
for (uint8_t i = 1; i <= uartCount; i++) crc16 = crc16 + b8_arr[i] * 44111;
crc8 = crc16 & 255;
b8_arr[0] = crc8;
// 8- 7-
k = 0;
q = 1;
for (uint8_t j = 0; j <= 24; j=j+8) { // 0, 8, 16, 24
for (uint8_t i = k; i <= k+6; i++) { // 0...6 / 7...13 /14...20 / 21...27 /
uart_arr[i+q] = b8_arr[i];
uart_arr[i+q] &= B01111111;
b8_arr[i] &= B10000000;
uart_arr[j] |= b8_arr[i];
uart_arr[j] >>= 1;
} // 0...6 / 7...13 /14...20 / 21...27 /
if (uartCount<j) break; //
uartCount ++;
k = k + 7;
q = q + 1;
} // 0, 8, 16, 24
} // UART uart_arr[32]
//
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = transmStart;
// uart_arr[32]
for (int8_t i = 0; i <= uartCount; i++) {
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = uart_arr[i];
}
//
while ( !( UCSRnA & (1<<UDRE0)) );
UDRn = transmEnd;
return;
}
//
inUart_arr[BYTEinCount] = dat;
BYTEinCount++;
} //
void startReceiver (uint32_t baudRate, uint32_t timeSend) {
// !!!
uint16_t ubrr = 0;
if (baudRate == 115200) ubrr = 8;
else ubrr = 16000000/16/baudRate-1;
// !!!
UBRRnH = (unsigned char)(ubrr>>8);
UBRRnL = (unsigned char)ubrr;
//
SetBit(UCSRnB, TXEN0);
//
SetBit(UCSRnB, RXEN0);
//
SetBit(UCSRnB, RXCIE0);
// 8 data 1 stop bit
SetBit(UCSRnC, 1);
SetBit(UCSRnC, 2);
//
Serial34bSendTimeOUT = timeSend;
OCR0A = 0xA0; //
SetBit(TIMSK0, OCIE0A); //
// PIN 13
LedPinOut();
//
for (uint8_t i = 0; i <= 26; i++) transm_arr[i] = 0;
for (uint8_t i = 0; i <= 26; i++) receiv_arr[i] = 0;
}
// I2C
#include <Wire.h>
//
#include <Adafruit_INA219.h>
//
Adafruit_INA219 ina219;
#include <LiquidCrystal.h>
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
// UART
#define Serial_2
byte transm_arr[27]; //
byte receiv_arr[27]; //
//
#include <Serial27bTransmitter.h>
boolean backL = 0; // enable fix
boolean backR = 0; // enable fix
boolean frontL = 0; // enable fix
boolean frontR = 0; // enable fix
boolean RL3 = 0; // RL3 ~
boolean LL3 = 0; // LL3 ~
boolean RL2 = 0; // RL2 ~ airPump
boolean LL2 = 0; // LL2 ~ airPump
boolean RL3y = 0; // RL3 ~
boolean LL3y = 0; // LL3 ~
boolean RL2y = 0; // RL2 ~ airPump
boolean LL2y = 0; // LL2 ~ airPump
boolean key4 = 0; // KEY BC547B LED-LIGHT
boolean fixEnaB = 0; //
boolean fixEnaS = 0; //
void setup() {
// , ()
startTransmitter(9600, 200);
pinMode(42, INPUT_PULLUP); //
pinMode(36, INPUT_PULLUP); // 1 ULN2803 (1-2) enable
pinMode(37, INPUT_PULLUP); // 1 ULN2803 (3-4) enable
pinMode(38, INPUT_PULLUP); // 1 ULN2803 (5-6) enable
pinMode(39, INPUT_PULLUP); // 1 ULN2803 (7-8) enable
pinMode(40, INPUT_PULLUP); // autodiving
pinMode(25, INPUT_PULLUP); // autodiving cancel
pinMode(29, INPUT_PULLUP); // QE4 2 ULN2803 (1-2) //
pinMode(30, INPUT_PULLUP); // QG6 2 ULN2803 (5-6) //
pinMode(22, INPUT_PULLUP); // QF5 2 ULN2803 (3-4) //
pinMode(23, INPUT_PULLUP); // QH7 2 ULN2803 (7-8) //
pinMode(41, INPUT_PULLUP); // enable Fix Motor button
lcd.begin(20, 4);
//
ina219.begin();
// RX/TX
pinMode(14, OUTPUT); digitalWrite(14, 1);
pinMode(15, OUTPUT); digitalWrite(15, 1);
pinMode(18, OUTPUT); digitalWrite(18, 1);
pinMode(19, OUTPUT); digitalWrite(19, 1);
}
void loop() {
//
if (digitalRead(41)) fixEnaB = false;
if (!digitalRead(41) && !fixEnaB) {
fixEnaS = !fixEnaS;
fixEnaB = true;
}
// fix
if (digitalRead(42)) key4 = false;
if (!digitalRead(42) && !key4) {
bitWrite(transm_arr[0], 0, !bitRead(transm_arr[0], 0));
key4 = true;
}
// bitWrite(transm_arr[0], 0, !digitalRead(42)); no fix
// autodiving
if (!digitalRead(40)) {
bitWrite(transm_arr[0], 1, !digitalRead(40)); // no fix
transm_arr[5] = map(analogRead(A12), 0, 1023, 0, 255);
} else {
bitWrite(transm_arr[0], 1, 0);
transm_arr[5] = 0;
}
// autodiving cancel
bitWrite(transm_arr[0], 2, !digitalRead(25)); // no fix
if (digitalRead(36)) RL3 = false;
if (!digitalRead(36) && !RL3) {
RL3y = !RL3y;
RL3 = true;
}
//bitWrite(transm_arr[0], 4, !digitalRead(36)); nofix
if (digitalRead(37)) LL3 = false;
if (!digitalRead(37) && !LL3) {
LL3y = !LL3y;
LL3 = true;
}
//bitWrite(transm_arr[0], 5, !digitalRead(37)); nofix
if (digitalRead(38)) RL2 = false;
if (!digitalRead(38) && !RL2) {
RL2y = !RL2y;
RL2 = true;
}
// bitWrite(transm_arr[0], 6, !digitalRead(38)); nofix
if (digitalRead(39)) LL2 = false;
if (!digitalRead(39) && !LL2) {
LL2y = !LL2y;
LL2 = true;
}
//
if (RL3y) transm_arr[1] = map(analogRead(A8), 0, 1023, 0, 255); else transm_arr[1] = 0; // RL3 ~
if (LL3y) transm_arr[2] = map(analogRead(A9), 0, 1023, 0, 255); else transm_arr[2] = 0; // LL3 ~
if (RL2y) transm_arr[3] = map(analogRead(A10), 0, 1023, 0, 255); else transm_arr[3] = 0; // RL2 ~ airPump
if (LL2y) transm_arr[4] = map(analogRead(A11), 0, 1023, 0, 255); else transm_arr[4] = 0; // LL2 ~ airPump
// L293D pwm
uint16_t leftRES = analogRead(A14);
uint16_t righRES = analogRead(A15);
// EN2
uint8_t pwmL;
if (leftRES >= 563) {
//
pwmL = map(analogRead(A14), 563, 1023, 0, 127);
bitWrite(pwmL,7,1);
} else if (leftRES <= 460) {
//
pwmL = map(analogRead(A14), 460, 0, 0, 127);
} else {
//
pwmL = 0;
}
// EN1
uint8_t pwmR;
if (righRES >= 563) {
//
pwmR = map(analogRead(A15), 563, 1023, 0, 127);
bitWrite(pwmR,7,1);
} else if (righRES <= 460) {
//
pwmR = map(analogRead(A15), 460, 0, 0, 127);
} else {
//
pwmR = 0;
}
//
transm_arr[6] = pwmL;
transm_arr[7] = pwmR;
// PWM
if (fixEnaS) {
//
if (digitalRead(30)) backL = false;
if (!digitalRead(30) && !backL) {
bitWrite(transm_arr[0], 4, !bitRead(transm_arr[0], 4));
backL = true;
}
//
if (digitalRead(23)) backR = false;
if (!digitalRead(23) && !backR) {
bitWrite(transm_arr[0], 5, !bitRead(transm_arr[0], 5));
backR = true;
}
//
if (digitalRead(29)) frontL = false;
if (!digitalRead(29) && !frontL) {
bitWrite(transm_arr[0], 6, !bitRead(transm_arr[0], 6));
frontL = true;
}
//
if (digitalRead(22)) frontR = false;
if (!digitalRead(22) && !frontR) {
bitWrite(transm_arr[0], 7, !bitRead(transm_arr[0], 7));
frontR = true;
}
} else {
bitWrite(transm_arr[0], 4, !digitalRead(30));
bitWrite(transm_arr[0], 5, !digitalRead(23));
bitWrite(transm_arr[0], 6, !digitalRead(29));
bitWrite(transm_arr[0], 7, !digitalRead(22));
}
//
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(transm_arr[1]);
lcd.setCursor(0, 1);
lcd.print(transm_arr[2]);
lcd.setCursor(0, 2);
lcd.print(transm_arr[3]);
lcd.setCursor(0, 3);
lcd.print(transm_arr[4]);
lcd.setCursor(4, 0);
lcd.print('-');
lcd.print(pwmL);
lcd.setCursor(4, 1);
lcd.print('-');
lcd.print(pwmR);
lcd.setCursor(4, 2);
lcd.print("d-");
lcd.print(bitRead(transm_arr[0], 1));
lcd.setCursor(4, 3);
lcd.print(map(analogRead(A12), 0, 1023, 0, 255));
// c pwm
lcd.setCursor(9, 0);
lcd.print(RL3y);
lcd.setCursor(9, 1);
lcd.print(LL3y);
lcd.setCursor(9, 2);
lcd.print(RL2y);
lcd.setCursor(9, 3);
lcd.print(LL2y);
// pwm
lcd.setCursor(18, 0);
lcd.print(bitRead(transm_arr[0], 6));
lcd.print(bitRead(transm_arr[0], 7));
lcd.setCursor(18, 1);
lcd.print(bitRead(transm_arr[0], 4));
lcd.print(bitRead(transm_arr[0], 5));
//
lcd.setCursor(15, 2);
lcd.print("rV");
float ShowV = receiv_arr[0];
ShowV = ShowV / 10;
lcd.print(ShowV, 1);
//
float busvoltage = 0;
// GND V-
busvoltage = ina219.getBusVoltage_V();
lcd.setCursor(15, 3);
lcd.print("tV");
lcd.print(busvoltage, 1);
//
lcd.setCursor(15, 0);
lcd.print(fixEnaS);
lcd.print(bitRead(transm_arr[0], 0));
delay(100);
}
/*
0
Bit0 KEY BC547B LED-LIGHT // 42
1 74HC595
QA0
QB1
QC2
QD3
QE4 2 ULN2803 (1-2)
QF5 2 ULN2803 (3-4)
QG6 2 ULN2803 (5-6)
QH7 2 ULN2803 (7-8)
*/
// I2C
#include <Wire.h>
//
#include <Adafruit_INA219.h>
//
Adafruit_INA219 ina219;
/*----------------------------------------------------*/
#define LL1 8
#define RL1 7
#define LL2 6 //~
#define RL2 5 //~
#define LL4 4
#define LL3 3 //~
#define RL3 2 //~
#define RL4 21
#define LED 20
#define LMrev 16
#define LMpwm 9 //~
#define RMrev 17
#define RMpwm 10 //~
// UART ( )
#define Serial_0
byte transm_arr[27]; //
byte receiv_arr[27]; //
//
#include <Serial27bReceiver.h>
long previousMillis = 0;
long interval = 0;
void setup() {
// , ()
startReceiver(9600, 400);
//
ina219.begin();
pinMode(LED, OUTPUT); // KEY BC547B LED-LIGHT
pinMode(LL1, OUTPUT); // LL1 BLesft
pinMode(RL1, OUTPUT); // RL1 RRight
pinMode(LL2, OUTPUT); // LL2 ~ airPump
pinMode(RL2, OUTPUT); // RL2 ~ airPump
pinMode(LL4, OUTPUT); // LL4 FLesft
pinMode(LL3, OUTPUT); // LL3 ~
pinMode(RL3, OUTPUT); // RL3 ~
pinMode(RL4, OUTPUT); // RL4 FRight
pinMode(LMrev, OUTPUT); //
pinMode(LMpwm, OUTPUT); //
pinMode(RMrev, OUTPUT); //
pinMode(RMpwm, OUTPUT); //
}
void loop() {
//
digitalWrite(LED, bitRead(transm_arr[0], 0));
//
digitalWrite(LL1, bitRead(transm_arr[0], 4));
digitalWrite(RL1, bitRead(transm_arr[0], 5));
digitalWrite(LL4, bitRead(transm_arr[0], 6));
digitalWrite(RL4, bitRead(transm_arr[0], 7));
//
analogWrite(RL3, transm_arr[1]); // RL3 ~
analogWrite(LL3, transm_arr[2]); // LL3 ~
analogWrite(RL2, transm_arr[3]); // RL2 ~ airPump
analogWrite(LL2, transm_arr[4]); // LL2 ~ airPump
// ,
digitalWrite(LMrev, bitRead(transm_arr[6], 7)); //
digitalWrite(RMrev, bitRead(transm_arr[7], 7)); //
uint8_t SpeedLM = transm_arr[6];
uint8_t SpeedRM = transm_arr[7];
bitClear(SpeedLM, 7);
bitClear(SpeedRM, 7);
analogWrite(LMpwm, map(SpeedLM, 0, 127, 0, 255));
analogWrite(RMpwm, map(SpeedRM, 0, 127, 0, 255));
// !!!
// INA219
float busvoltage = 0;
// GND V-
busvoltage = ina219.getBusVoltage_V() * 10;
busvoltage = round(busvoltage);
//
receiv_arr[0] = busvoltage;
if (digitalRead(13) == LOW) {
if (rErrTime > 1) {
transm_arr[0] = 1;
transm_arr[1] = 0;
transm_arr[2] = 0;
transm_arr[3] = 0;
transm_arr[4] = 0;
transm_arr[6] = 0;
transm_arr[7] = 0;
}
} else rErrTime =0;
// autodiving
if (bitRead(transm_arr[0],1)) {
interval = transm_arr[5] * 1000;
analogWrite(RL3, 255); // RL3 ~
analogWrite(LL3, 255); // LL3 ~
analogWrite(RL2, 255); // RL2 ~ airPump
analogWrite(LL2, 255); // LL2 ~ airPump
autodiving_label:
unsigned long currentMillis = millis();
// ,
if(currentMillis - previousMillis > interval) {
//
previousMillis = currentMillis;
} else {
//
if (bitRead(transm_arr[0],2)) interval=0;
goto autodiving_label;
}
}
delay(100);
}

{kind=link}
Comments