

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












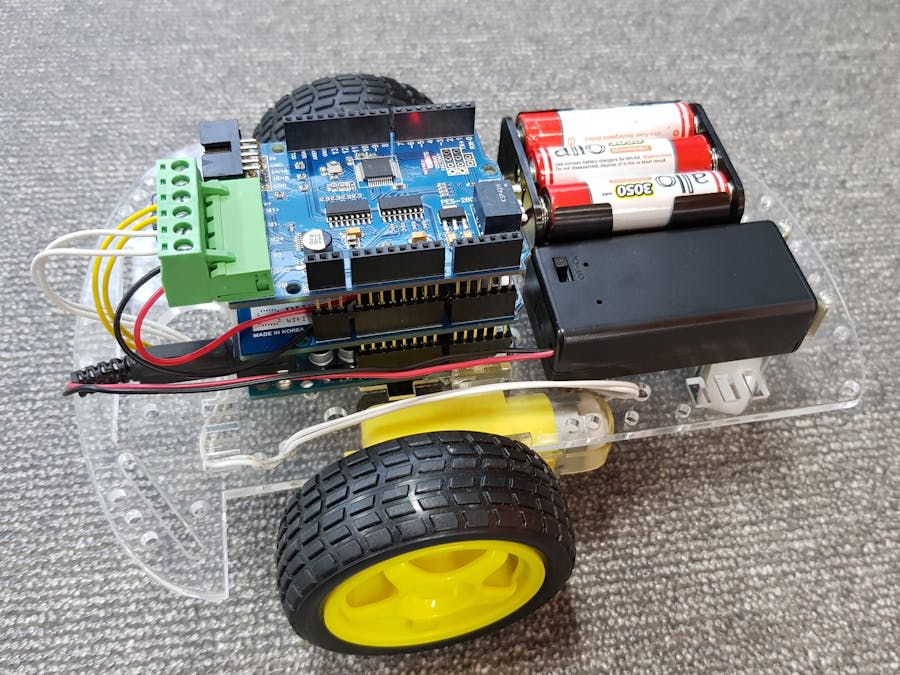
Demonstration
Read moreIf you are new to Arduino, you can get started with Arduino - Motor tutorial
How To1. Web App
We do not need to program for web app. PHPoC Shield has a bult-in web app, called "Web Remote Push". This web app is customizable via a setting page.
Default web app user interface
default UI
Click "setup" to customize
new setting
After changing the setting as above, we has new UI
new UI
2. Arduino Code
The Arduino code is the combination of two example "PHPoC -> WebRemotePush.ino" and "PHPoC Expansion -> ExpansionDCMotor"
See code section.
To buy electronic components, you can order them from utsource.net
The Best Arduino Starter Kit for Beginner






{kind=link}
Comments