



Hardware components | ||||||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
The main goal of this project is to build a functional, cost-effective surveillance system that can be put anywhere for any purpose. This project uses two particle photons, one connected to a camera and another to a PIR motion sensor. The camera is configured to take images and send a notification when unexpected motion occurs.
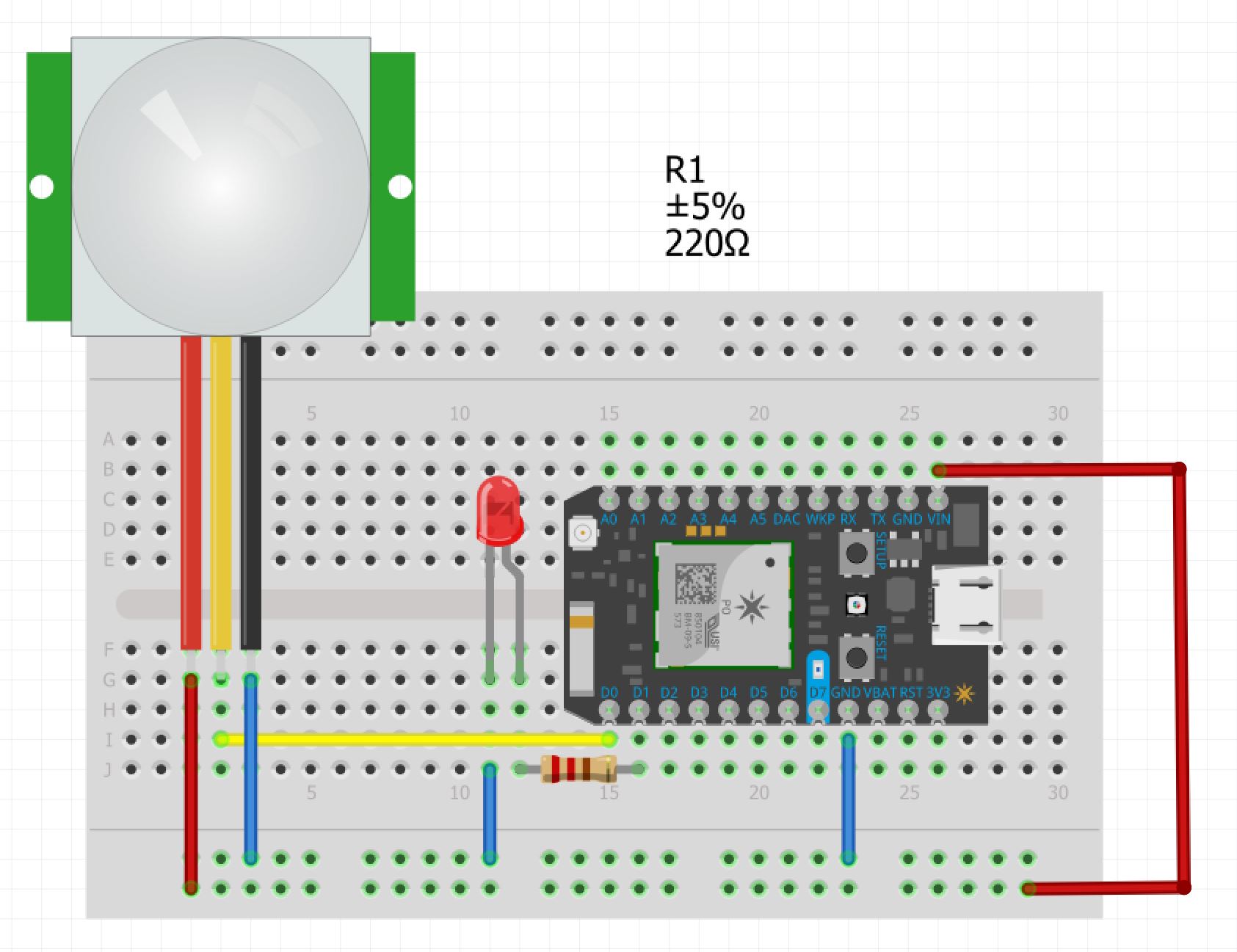
Getting Started:PIR Sensor Set-Up:
The schematic for this Particle / Sensor configuration can be seen in the schematic section! Below is just a photo for reference. After building this circuit, flash the code called PIRSensor.ino and the motion sensor should be good to go.
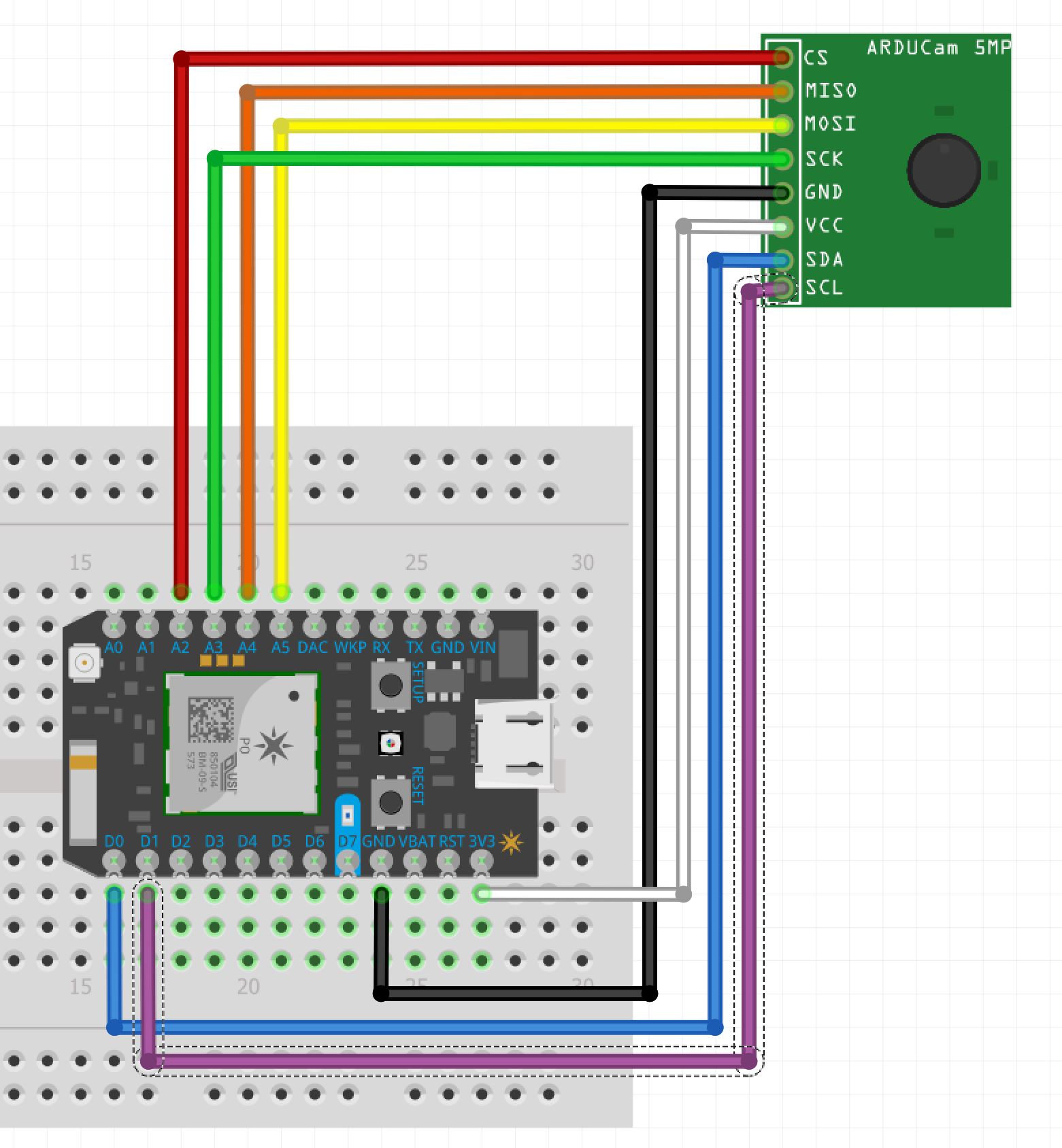
Ardu-Cam Set-Up:
Clone this GitHub repository. The firmware/ server will allow media to be saved to your computer. Copy the camera codes (cameraapp.ino, ArduCam.cpp, Arducam.h, memorysaver.h, ov5642_regs.h) to the to the build IDE and flash to the device. These codes were modified from the previously mentioned GitHub repository. In the main code, camerapp.ino, update your IP address. Build a folder that will be used as the image directory (must be in the tcp_server folder: particle_arducam_master - services - tcp_server - create folder called "images"). Install Node.js then run your server. Node.js presents an event loop as a run-time construct instead of as a library. Install Moment.js. Open Windows command prompt.
Set the working directory to the tcp_server location:
cd C:\Users\carri\Desktop\particle_arducam-master\services\tcp_server
Save the moment software to the server:
C:\Users\carri\Desktop\particle_arducam-master\services\tcp_server>npm install moment –save
Run the Node server:
C:\Users\carri\Desktop\particle_arducam-master\services\tcp_server>node main.js
Now the server should be listening and an an initial connection received confirmation should display:
Listeningfor TCP packets on port 5550 ...
Connection received
If the connection received confirmation does not appear, try tripping the PIR sensor, make sure the photon is connected to the internet, or reset the photon.
When motion is detected the you should start seeing outputs like this on windows command prompt:
saving image
writing 550379 bytes to file
Images should begin to populate the set folder.
Image Quality:
For an idea of image quality, here are some images captured by the ArduCam:
All of the data is sent to ThingSpeak where overall stats can be viewed by the user. The data from the PIR Sensor is shown as frequency of motion detected daily (also corresponding to when photos were taken).
See the ThingSpeak graph here: https://thingspeak.com/channels/625065
The camera can also be configured to send the photos to ThingSpeak or other image analysis tools, but for privacy this route was not taken.
IFTTT:Using IFTTT, an email or text can be sent when motion is detected. This is useful if you're suspicious your roommate is sneaking into your treasure box when you're not around, or whatever the case. We have configured an IFTTT applet to send an email alert when motion is detected:
This is an example of the email alert that IFTTT sent:
IFTTT also allows you to easily turn these alerts on or off from your phone, so you wont receive any unnecessary alerts when you know the motion detector will be going off.
YouTube Video:Here is a short video showing how to set up the TCP server and where to find your images.
Multiple AIs are out there today that can understand, analyze and describe the content of any photograph. [Microsoft's Caption Bot, Clarifai , Google's Cloud Vision, Wolfram's Imagine Identify, etc...} These could be incorporated to better understand and react to ArduCam's media. IFTTT could then send you an alert!
// This #include statement was automatically added by the Particle IDE.
#include "ArduCAM.h"
#include "memorysaver.h""
#include "ArduCAM.h"
#include "ov5642_regs.h"
SYSTEM_THREAD(ENABLED);
#define VERSION_SLUG "7n"
TCPClient client;
#define SERVER_ADDRESS "your ip address here"
#define SERVER_TCP_PORT 5550
#define TX_BUFFER_MAX 1024
uint8_t buffer[TX_BUFFER_MAX + 1];
int tx_buffer_index = 0;
int imagesize = 0;
int count = 0;
const String key = "your key here"; //thingspeak write key
//#define SD_CS D2
// set pin A2 as the slave select for the ArduCAM shield
const int SPI_CS = A2;
// allow us to use itoa() in this scope
//extern char* itoa(int a, char* buffer, unsigned char radix);
//#define BMPIMAGEOFFSET 66
//const char bmp_header[BMPIMAGEOFFSET] PROGMEM =
//{
// 0x42, 0x4D, 0x36, 0x58, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x42, 0x00, 0x00, 0x00, 0x28, 0x00,
// 0x00, 0x00, 0x40, 0x01, 0x00, 0x00, 0xF0, 0x00, 0x00, 0x00, 0x01, 0x00, 0x10, 0x00, 0x03, 0x00,
// 0x00, 0x00, 0x00, 0x58, 0x02, 0x00, 0xC4, 0x0E, 0x00, 0x00, 0xC4, 0x0E, 0x00, 0x00, 0x00, 0x00,
// 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00, 0xE0, 0x07, 0x00, 0x00, 0x1F, 0x00,
// 0x00, 0x00
//};
ArduCAM myCAM(OV5642, SPI_CS);
void setup()
{
Particle.publish("status", "Good morning, Version: " + String(VERSION_SLUG));
delay(1000);
uint8_t vid,pid;
uint8_t temp;
Wire.setSpeed(CLOCK_SPEED_100KHZ);
Wire.begin();
Serial.begin(115200);
Serial.println("ArduCAM Start!");
// set the SPI_CS as an output:
pinMode(SPI_CS, OUTPUT);
// initialize SPI:
SPI.begin();
//SPI.begin(SPI_MODE_MASTER);
//SPI.begin(SPI_MODE_SLAVE, SPI_CS);
while(1) {
Particle.publish("status", "checking for camera");
Serial.println("Checking for camera...");
//Check if the ArduCAM SPI bus is OK
myCAM.write_reg(ARDUCHIP_TEST1, 0x55);
temp = myCAM.read_reg(ARDUCHIP_TEST1);
if(temp != 0x55)
{
Particle.publish("stats", "SPI interface Error!");
Serial.println("SPI interface Error!");
Particle.publish("status", "myCam.read_reg said " + String(temp));
Serial.println("myCam.read_reg said " + String(temp));
delay(5000);
}
else {
break;
}
Particle.process();
}
Particle.publish("status", "Camera found.");
while(1){
//Check if the camera module type is OV5642
myCAM.rdSensorReg16_8(OV5642_CHIPID_HIGH, &vid);
myCAM.rdSensorReg16_8(OV5642_CHIPID_LOW, &pid);
if ((vid != 0x56) || (pid != 0x42)){
Serial.println(F("Can't find OV5642 module!"));
Particle.publish("status", "Not found, camera says " + String::format("%d:%d", vid, pid));
delay(5000);
continue;
}
else {
Serial.println(F("OV5642 detected."));
Particle.publish("status", "OV5642 detected: " + String::format("%d:%d", vid, pid));
break;
}
}
Serial.println("Camera found, initializing...");
//myCAM.write_reg(ARDUCHIP_MODE, 0x01); //Switch to CAM
//Change MCU mode
myCAM.set_format(JPEG);
delay(100);
myCAM.InitCAM();
delay(100);
// myCAM.set_format(JPEG);
// delay(100);
myCAM.set_bit(ARDUCHIP_TIM, VSYNC_LEVEL_MASK);
//myCAM.write_reg(ARDUCHIP_TIM, VSYNC_LEVEL_MASK);
delay(100);
myCAM.clear_fifo_flag();
delay(100);
myCAM.write_reg(ARDUCHIP_FRAMES,0x00);
delay(100);
myCAM.OV5642_set_JPEG_size(OV5642_320x240);
//myCAM.OV5640_set_JPEG_size(OV5642_1600x1200);
//myCAM.OV5640_set_JPEG_size(OV5642_640x480); // ?
//delay(100);
// wait a sec`
delay(1000);
client.connect(SERVER_ADDRESS, SERVER_TCP_PORT);
Particle.subscribe("KN_motion", KN_motion);
}
void loop()
{
if (!client.connected()) {
//client.stop();
Particle.publish("status", "Attempting to reconnect to TCP Server...");
if (!client.connect(SERVER_ADDRESS, SERVER_TCP_PORT)) {
delay(5000);
return;
}
}
}
void KN_motion(const char *event, const char *data)
{
Particle.publish("status_start", "1"); //Taking a picture...
Serial.println("Taking a picture...");
//myCAM.OV5640_set_JPEG_size(OV5640_320x240); //works
//myCAM.OV5640_set_JPEG_size(OV5642_1600x1200); //doesn't work
//myCAM.OV5640_set_JPEG_size(OV5642_1280x960); // doesn't work?
//myCAM.OV5640_set_JPEG_size(OV5642_640x480); // ?
myCAM.OV5642_set_JPEG_size(OV5642_2592x1944); //works
delay(100);
//myCAM.set_bit(ARDUCHIP_GPIO,GPIO_PWDN_MASK);
//myCAM.clear_bit(ARDUCHIP_GPIO,GPIO_PWDN_MASK);
myCAM.flush_fifo();
delay(100);
myCAM.clear_fifo_flag();
delay(100);
myCAM.start_capture();
delay(100);
//myCAM.start_capture();
unsigned long start_time = millis(),
last_publish = millis();
//
// wait for the photo to be done
//
while(!myCAM.get_bit(ARDUCHIP_TRIG , CAP_DONE_MASK)) {
Particle.process();
delay(10);
unsigned long now = millis();
if ((now - last_publish) > 1000) {
Particle.publish("status", "waiting for photo " + String(now-start_time));
last_publish = now;
}
if ((now-start_time) > 30000) {
Particle.publish("status", "bailing...");
break;
}
}
delay(100);
count++;
Serial.print("Updating Thingspeak:");
Serial.print(count);
int length = myCAM.read_fifo_length();
int imagesize = length;
Serial.println("Image size is " + String(length));
Particle.publish("imagesize", String(imagesize));
Particle.publish("thingSpeakWrite_All", +
"{ \"2\": \"" + String(imagesize) + "\"," +
"\"k\": \"" + key + "\" }", 60, PRIVATE);
delay(5000);
uint8_t temp = 0xff, temp_last = 0;
int bytesRead = 0;
if(myCAM.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK))
{
delay(100);
Serial.println(F("ACK CMD CAM Capture Done."));
Particle.publish("status", "Capture Done");
//myCAM.CS_LOW();
myCAM.set_fifo_burst();
//#if !(defined (OV5642_MINI_5MP_PLUS) ||(defined (ARDUCAM_SHIELD_V2) && defined (OV5642_CAM)))
//SPI.transfer(0xFF);
//#endif
tx_buffer_index = 0;
temp = 0;
//while (bytesRead < length)
while( (temp != 0xD9) | (temp_last != 0xFF) )
{
temp_last = temp;
temp = myCAM.read_fifo();
bytesRead++;
buffer[tx_buffer_index++] = temp;
if (tx_buffer_index >= TX_BUFFER_MAX) {
client.write(buffer, tx_buffer_index);
tx_buffer_index = 0;
Particle.process();
}
if (bytesRead > 2048000) {
// failsafe
break;
}
}
if (tx_buffer_index != 0) {
client.write(buffer, tx_buffer_index);
}
//Clear the capture done flag
//myCAM.CS_HIGH();
myCAM.clear_fifo_flag();
Serial.println(F("End of Photo"));
}
//Serial.println("sleeping 10 seconds");
//Particle.publish("status", "Sleeping 10 seconds");
//delay(10 * 1000);
}
#ifndef OV5642_REGS_H
#define OV5642_REGS_H
#include "ArduCAM.h"
//#include <avr/pgmspace.h>
#define OV5642_CHIPID_HIGH 0x300a
#define OV5642_CHIPID_LOW 0x300b
const struct sensor_reg ov5642_320x240[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xa8},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0x1 },
{0x3809 ,0x40},
{0x380a ,0x0 },
{0x380b ,0xF0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0x3801, 0xb0},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_640x480[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xa8},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0x2 },
{0x3809 ,0x80},
{0x380a ,0x1 },
{0x380b ,0xe0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0x3801, 0xb0},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_1280x960[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xB0},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0x5 },
{0x3809 ,0x00},
{0x380a ,0x3 },
{0x380b ,0xC0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_1600x1200[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xB0},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0x6 },
{0x3809 ,0x40},
{0x380a ,0x4 },
{0x380b ,0xB0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_1024x768[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xB0},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0x4 },
{0x3809 ,0x0},
{0x380a ,0x3 },
{0x380b ,0x0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_2048x1536[] PROGMEM =
{
{0x3800 ,0x01},
{0x3801 ,0xb0},
{0x3802 ,0x00},
{0x3803 ,0x0a},
{0x3804 ,0x0a},
{0x3805 ,0x20},
{0x3806 ,0x07},
{0x3807 ,0x98},
{0x3808 ,0x08},
{0x3809 ,0x00},
{0x380a ,0x06},
{0x380b ,0x00},
{0x380c ,0x0c},
{0x380d ,0x80},
{0x380e ,0x07},
{0x380f ,0xd0},
{0x3810 ,0xc2},
{0x3815 ,0x44},
{0x3818 ,0xa8},
{0x3824 ,0x01},
{0x3827 ,0x0a},
{0x3a00 ,0x78},
{0x3a0d ,0x10},
{0x3a0e ,0x0d},
{0x3a00 ,0x78},
{0x460b ,0x35},
{0x471d ,0x00},
{0x471c ,0x50},
{0x5682 ,0x0a},
{0x5683 ,0x20},
{0x5686 ,0x07},
{0x5687 ,0x98},
{0x589b ,0x00},
{0x589a ,0xc0},
//{0x4407 ,0x08},
{0x589b ,0x00},
{0x589a ,0xc0},
{0x3002 ,0x0c},
{0x3002 ,0x00},
{0x4300 ,0x32},
{0x460b ,0x35},
{0x3002 ,0x0c},
{0x3002 ,0x00},
{0x4713 ,0x02},
{0x4600 ,0x80},
{0x4721 ,0x02},
{0x471c ,0x40},
{0x4408 ,0x00},
{0x460c ,0x22},
{0x3815 ,0x04},
{0x3818 ,0xc8},
{0x501f ,0x00},
{0x5002 ,0xe0},
{0x440a ,0x01},
{0x4402 ,0x90},
{0x3811 ,0xf0},
{0x3818, 0xa8},
{0x3621, 0x10},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_2592x1944[] PROGMEM =
{
{0x3800 ,0x1 },
{0x3801 ,0xB0},
{0x3802 ,0x0 },
{0x3803 ,0xA },
{0x3804 ,0xA },
{0x3805 ,0x20},
{0x3806 ,0x7 },
{0x3807 ,0x98},
{0x3808 ,0xA },
{0x3809 ,0x20},
{0x380a ,0x7 },
{0x380b ,0x98},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0xA },
{0x5683 ,0x20},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x7 },
{0x5687 ,0x98},
{0xffff, 0xff},
};
const struct sensor_reg ov5642_dvp_zoom8[] PROGMEM=
{
{0x3800 ,0x5 },
{0x3801 ,0xf8},
{0x3802 ,0x3 },
{0x3803 ,0x5c},
{0x3804 ,0x1 },
{0x3805 ,0x44},
{0x3806 ,0x0 },
{0x3807 ,0xf0},
{0x3808 ,0x1 },
{0x3809 ,0x40},
{0x380a ,0x0 },
{0x380b ,0xf0},
{0x380c ,0xc },
{0x380d ,0x80},
{0x380e ,0x7 },
{0x380f ,0xd0},
{0x5001 ,0x7f},
{0x5680 ,0x0 },
{0x5681 ,0x0 },
{0x5682 ,0x1 },
{0x5683 ,0x44},
{0x5684 ,0x0 },
{0x5685 ,0x0 },
{0x5686 ,0x0 },
{0x5687 ,0xf3},
/*
{0x381c ,0x21},
{0x3524 ,0x0 },
{0x3825 ,0x0 },
{0x3826 ,0x0 },
{0x3827 ,0x0 },
{0x3010 ,0x70},
*/
{0xffff, 0xff},
};
const struct sensor_reg OV5642_QVGA_Preview[] PROGMEM =
{
{0x3103 ,0x93},
{0x3008 ,0x82},
{0x3017 ,0x7f},
{0x3018 ,0xfc},
{0x3810 ,0xc2},
{0x3615 ,0xf0},
{0x3000 ,0x00},
{0x3001 ,0x00},
{0x3002 ,0x5c},
{0x3003 ,0x00},
{0x3004 ,0xff},
{0x3005 ,0xff},
{0x3006 ,0x43},
{0x3007 ,0x37},
{0x3011 ,0x08},
{0x3010 ,0x10},
{0x460c ,0x22},
{0x3815 ,0x04},
{0x370c ,0xa0},
{0x3602 ,0xfc},
{0x3612 ,0xff},
{0x3634 ,0xc0},
{0x3613 ,0x00},
{0x3605 ,0x7c},
{0x3621 ,0x09},
{0x3622 ,0x60},
{0x3604 ,0x40},
{0x3603 ,0xa7},
{0x3603 ,0x27},
{0x4000 ,0x21},
{0x401d ,0x22},
{0x3600 ,0x54},
{0x3605 ,0x04},
{0x3606 ,0x3f},
{0x3c01 ,0x80},
{0x5000 ,0x4f},
{0x5020 ,0x04},
{0x5181 ,0x79},
{0x5182 ,0x00},
{0x5185 ,0x22},
{0x5197 ,0x01},
{0x5001 ,0xff},
{0x5500 ,0x0a},
{0x5504 ,0x00},
{0x5505 ,0x7f},
{0x5080 ,0x08},
{0x300e ,0x18},
{0x4610 ,0x00},
{0x471d ,0x05},
{0x4708 ,0x06},
{0x3808 ,0x02},
{0x3809 ,0x80},
{0x380a ,0x01},
{0x380b ,0xe0},
{0x380e ,0x07},
{0x380f ,0xd0},
{0x501f ,0x00},
{0x5000 ,0x4f},
{0x4300 ,0x30},
{0x3503 ,0x07},
{0x3501 ,0x73},
{0x3502 ,0x80},
{0x350b ,0x00},
{0x3503 ,0x07},
{0x3824 ,0x11},
{0x3501 ,0x1e},
{0x3502 ,0x80},
{0x350b ,0x7f},
{0x380c ,0x0c},
{0x380d ,0x80},
{0x380e ,0x03},
{0x380f ,0xe8},
{0x3a0d ,0x04},
{0x3a0e ,0x03},
{0x3818 ,0xc1},
{0x3705 ,0xdb},
{0x370a ,0x81},
{0x3801 ,0x80},
{0x3621 ,0x87},
{0x3801 ,0x50},
{0x3803 ,0x08},
{0x3827 ,0x08},
{0x3810 ,0x40},
{0x3804 ,0x05},
{0x3805 ,0x00},
{0x5682 ,0x05},
{0x5683 ,0x00},
{0x3806 ,0x03},
{0x3807 ,0xc0},
{0x5686 ,0x03},
{0x5687 ,0xbc},
{0x3a00 ,0x78},
{0x3a1a ,0x05},
{0x3a13 ,0x30},
{0x3a18 ,0x00},
{0x3a19 ,0x7c},
{0x3a08 ,0x12},
{0x3a09 ,0xc0},
{0x3a0a ,0x0f},
{0x3a0b ,0xa0},
{0x350c ,0x07},
{0x350d ,0xd0},
{0x3500 ,0x00},
{0x3501 ,0x00},
{0x3502 ,0x00},
{0x350a ,0x00},
{0x350b ,0x00},
{0x3503 ,0x00},
{0x528a ,0x02},
{0x528b ,0x04},
{0x528c ,0x08},
{0x528d ,0x08},
{0x528e ,0x08},
{0x528f ,0x10},
{0x5290 ,0x10},
{0x5292 ,0x00},
{0x5293 ,0x02},
{0x5294 ,0x00},
{0x5295 ,0x02},
{0x5296 ,0x00},
{0x5297 ,0x02},
{0x5298 ,0x00},
{0x5299 ,0x02},
{0x529a ,0x00},
{0x529b ,0x02},
{0x529c ,0x00},
{0x529d ,0x02},
{0x529e ,0x00},
{0x529f ,0x02},
{0x3030 ,0x0b},
{0x3a02 ,0x00},
{0x3a03 ,0x7d},
{0x3a04 ,0x00},
{0x3a14 ,0x00},
{0x3a15 ,0x7d},
{0x3a16 ,0x00},
{0x3a00 ,0x78},
{0x3a08 ,0x09},
{0x3a09 ,0x60},
{0x3a0a ,0x07},
{0x3a0b ,0xd0},
{0x3a0d ,0x08},
{0x3a0e ,0x06},
{0x5193 ,0x70},
{0x589b ,0x04},
{0x589a ,0xc5},
{0x401e ,0x20},
{0x4001 ,0x42},
{0x401c ,0x04},
{0x528a ,0x01},
{0x528b ,0x04},
{0x528c ,0x08},
{0x528d ,0x10},
{0x528e ,0x20},
{0x528f ,0x28},
{0x5290 ,0x30},
{0x5292 ,0x00},
{0x5293 ,0x01},
{0x5294 ,0x00},
{0x5295 ,0x04},
{0x5296 ,0x00},
{0x5297 ,0x08},
{0x5298 ,0x00},
{0x5299 ,0x10},
{0x529a ,0x00},
{0x529b ,0x20},
{0x529c ,0x00},
{0x529d ,0x28},
{0x529e ,0x00},
{0x529f ,0x30},
{0x5282 ,0x00},
{0x5300 ,0x00},
{0x5301 ,0x20},
{0x5302 ,0x00},
{0x5303 ,0x7c},
{0x530c ,0x00},
{0x530d ,0x0c},
{0x530e ,0x20},
{0x530f ,0x80},
{0x5310 ,0x20},
{0x5311 ,0x80},
{0x5308 ,0x20},
{0x5309 ,0x40},
{0x5304 ,0x00},
{0x5305 ,0x30},
{0x5306 ,0x00},
{0x5307 ,0x80},
{0x5314 ,0x08},
{0x5315 ,0x20},
{0x5319 ,0x30},
{0x5316 ,0x10},
{0x5317 ,0x00},
{0x5318 ,0x02},
{0x5402 ,0x3f},
{0x5403 ,0x00},
{0x3406 ,0x00},
{0x5180 ,0xff},
{0x5181 ,0x52},
{0x5182 ,0x11},
{0x5183 ,0x14},
{0x5184 ,0x25},
{0x5185 ,0x24},
{0x5186 ,0x06},
{0x5187 ,0x08},
{0x5188 ,0x08},
{0x5189 ,0x7c},
{0x518a ,0x60},
{0x518b ,0xb2},
{0x518c ,0xb2},
{0x518d ,0x44},
{0x518e ,0x3d},
{0x518f ,0x58},
{0x5190 ,0x46},
{0x5191 ,0xf8},
{0x5192 ,0x04},
{0x5193 ,0x70},
{0x5194 ,0xf0},
{0x5195 ,0xf0},
{0x5196 ,0x03},
{0x5197 ,0x01},
{0x5198 ,0x04},
{0x5199 ,0x12},
{0x519a ,0x04},
{0x519b ,0x00},
{0x519c ,0x06},
{0x519d ,0x82},
{0x519e ,0x00},
{0x5025 ,0x80},
{0x5583 ,0x40},
{0x5584 ,0x40},
{0x5580 ,0x02},
{0x5000 ,0xcf},
{0x3710 ,0x10},
{0x3632 ,0x51},
{0x3702 ,0x10},
{0x3703 ,0xb2},
{0x3704 ,0x18},
{0x370b ,0x40},
{0x370d ,0x03},
{0x3631 ,0x01},
{0x3632 ,0x52},
{0x3606 ,0x24},
{0x3620 ,0x96},
{0x5785 ,0x07},
{0x3a13 ,0x30},
{0x3600 ,0x52},
{0x3604 ,0x48},
{0x3606 ,0x1b},
{0x370d ,0x0b},
{0x370f ,0xc0},
{0x3709 ,0x01},
{0x3823 ,0x00},
{0x5007 ,0x00},
{0x5009 ,0x00},
{0x5011 ,0x00},
{0x5013 ,0x00},
{0x519e ,0x00},
{0x5086 ,0x00},
{0x5087 ,0x00},
{0x5088 ,0x00},
{0x5089 ,0x00},
{0x302b ,0x00},
{0x3808 ,0x01},
{0x3809 ,0x40},
{0x380a ,0x00},
{0x380b ,0xf0},
{0x3a00 ,0x78},
{0x5001 ,0xFF},
{0x5583 ,0x50},
{0x5584 ,0x50},
{0x5580 ,0x02},
{0x3c01 ,0x80},
{0x3c00 ,0x04},
{0x5800 ,0x48},
{0x5801 ,0x31},
{0x5802 ,0x21},
{0x5803 ,0x1b},
{0x5804 ,0x1a},
{0x5805 ,0x1e},
{0x5806 ,0x29},
{0x5807 ,0x38},
{0x5808 ,0x26},
{0x5809 ,0x17},
{0x580a ,0x11},
{0x580b ,0xe },
{0x580c ,0xd },
{0x580d ,0xe },
{0x580e ,0x13},
{0x580f ,0x1a},
{0x5810 ,0x15},
{0x5811 ,0xd },
{0x5812 ,0x8 },
{0x5813 ,0x5 },
{0x5814 ,0x4 },
{0x5815 ,0x5 },
{0x5816 ,0x9 },
{0x5817 ,0xd },
{0x5818 ,0x11},
{0x5819 ,0xa },
{0x581a ,0x4 },
{0x581b ,0x0 },
{0x581c ,0x0 },
{0x581d ,0x1 },
{0x581e ,0x6 },
{0x581f ,0x9 },
{0x5820 ,0x12},
{0x5821 ,0xb },
{0x5822 ,0x4 },
{0x5823 ,0x0 },
{0x5824 ,0x0 },
{0x5825 ,0x1 },
{0x5826 ,0x6 },
{0x5827 ,0xa },
{0x5828 ,0x17},
{0x5829 ,0xf },
{0x582a ,0x9 },
{0x582b ,0x6 },
{0x582c ,0x5 },
{0x582d ,0x6 },
{0x582e ,0xa },
{0x582f ,0xe },
{0x5830 ,0x28},
{0x5831 ,0x1a},
{0x5832 ,0x11},
{0x5833 ,0xe },
{0x5834 ,0xe },
{0x5835 ,0xf },
{0x5836 ,0x15},
{0x5837 ,0x1d},
{0x5838 ,0x6e},
{0x5839 ,0x39},
{0x583a ,0x27},
{0x583b ,0x1f},
{0x583c ,0x1e},
{0x583d ,0x23},
{0x583e ,0x2f},
{0x583f ,0x41},
{0x5840 ,0xe },
{0x5841 ,0xc },
{0x5842 ,0xd },
{0x5843 ,0xc },
{0x5844 ,0xc },
{0x5845 ,0xc },
{0x5846 ,0xc },
{0x5847 ,0xc },
{0x5848 ,0xd },
{0x5849 ,0xe },
{0x584a ,0xe },
{0x584b ,0xa },
{0x584c ,0xe },
{0x584d ,0xe },
{0x584e ,0x10},
{0x584f ,0x10},
{0x5850 ,0x11},
{0x5851 ,0xa },
{0x5852 ,0xf },
{0x5853 ,0xe },
{0x5854 ,0x10},
{0x5855 ,0x10},
{0x5856 ,0x10},
{0x5857 ,0xa },
{0x5858 ,0xe },
{0x5859 ,0xe },
{0x585a ,0xf },
{0x585b ,0xf },
{0x585c ,0xf },
{0x585d ,0xa },
{0x585e ,0x9 },
{0x585f ,0xd },
{0x5860 ,0xc },
{0x5861 ,0xb },
{0x5862 ,0xd },
{0x5863 ,0x7 },
{0x5864 ,0x17},
{0x5865 ,0x14},
{0x5866 ,0x18},
{0x5867 ,0x18},
{0x5868 ,0x16},
{0x5869 ,0x12},
{0x586a ,0x1b},
{0x586b ,0x1a},
{0x586c ,0x16},
{0x586d ,0x16},
{0x586e ,0x18},
{0x586f ,0x1f},
{0x5870 ,0x1c},
{0x5871 ,0x16},
{0x5872 ,0x10},
{0x5873 ,0xf },
{0x5874 ,0x13},
{0x5875 ,0x1c},
{0x5876 ,0x1e},
{0x5877 ,0x17},
{0x5878 ,0x11},
{0x5879 ,0x11},
{0x587a ,0x14},
{0x587b ,0x1e},
{0x587c ,0x1c},
{0x587d ,0x1c},
{0x587e ,0x1a},
{0x587f ,0x1a},
{0x5880 ,0x1b},
{0x5881 ,0x1f},
{0x5882 ,0x14},
{0x5883 ,0x1a},
{0x5884 ,0x1d},
{0x5885 ,0x1e},
{0x5886 ,0x1a},
{0x5887 ,0x1a},
{0x5180 ,0xff},
{0x5181 ,0x52},
{0x5182 ,0x11},
{0x5183 ,0x14},
{0x5184 ,0x25},
{0x5185 ,0x24},
{0x5186 ,0x14},
{0x5187 ,0x14},
{0x5188 ,0x14},
{0x5189 ,0x69},
{0x518a ,0x60},
{0x518b ,0xa2},
{0x518c ,0x9c},
{0x518d ,0x36},
{0x518e ,0x34},
{0x518f ,0x54},
{0x5190 ,0x4c},
{0x5191 ,0xf8},
{0x5192 ,0x04},
{0x5193 ,0x70},
{0x5194 ,0xf0},
{0x5195 ,0xf0},
{0x5196 ,0x03},
{0x5197 ,0x01},
{0x5198 ,0x05},
{0x5199 ,0x2f},
{0x519a ,0x04},
{0x519b ,0x00},
{0x519c ,0x06},
{0x519d ,0xa0},
{0x519e ,0xa0},
{0x528a ,0x00},
{0x528b ,0x01},
{0x528c ,0x04},
{0x528d ,0x08},
{0x528e ,0x10},
{0x528f ,0x20},
{0x5290 ,0x30},
{0x5292 ,0x00},
{0x5293 ,0x00},
{0x5294 ,0x00},
{0x5295 ,0x01},
{0x5296 ,0x00},
{0x5297 ,0x04},
{0x5298 ,0x00},
{0x5299 ,0x08},
{0x529a ,0x00},
{0x529b ,0x10},
{0x529c ,0x00},
{0x529d ,0x20},
{0x529e ,0x00},
{0x529f ,0x30},
{0x5282 ,0x00},
{0x5300 ,0x00},
{0x5301 ,0x20},
{0x5302 ,0x00},
{0x5303 ,0x7c},
{0x530c ,0x00},
{0x530d ,0x10},
{0x530e ,0x20},
{0x530f ,0x80},
{0x5310 ,0x20},
{0x5311 ,0x80},
{0x5308 ,0x20},
{0x5309 ,0x40},
{0x5304 ,0x00},
{0x5305 ,0x30},
{0x5306 ,0x00},
{0x5307 ,0x80},
{0x5314 ,0x08},
{0x5315 ,0x20},
{0x5319 ,0x30},
{0x5316 ,0x10},
{0x5317 ,0x00},
{0x5318 ,0x02},
{0x5380 ,0x01},
{0x5381 ,0x00},
{0x5382 ,0x00},
{0x5383 ,0x1f},
{0x5384 ,0x00},
{0x5385 ,0x06},
{0x5386 ,0x00},
{0x5387 ,0x00},
{0x5388 ,0x00},
{0x5389 ,0xE1},
{0x538A ,0x00},
{0x538B ,0x2B},
{0x538C ,0x00},
{0x538D ,0x00},
{0x538E ,0x00},
{0x538F ,0x10},
{0x5390 ,0x00},
{0x5391 ,0xB3},
{0x5392 ,0x00},
{0x5393 ,0xA6},
{0x5394 ,0x08},
{0x5480 ,0x0c},
{0x5481 ,0x18},
{0x5482 ,0x2f},
{0x5483 ,0x55},
{0x5484 ,0x64},
{0x5485 ,0x71},
{0x5486 ,0x7d},
{0x5487 ,0x87},
{0x5488 ,0x91},
{0x5489 ,0x9a},
{0x548A ,0xaa},
{0x548B ,0xb8},
{0x548C ,0xcd},
{0x548D ,0xdd},
{0x548E ,0xea},
{0x548F ,0x1d},
{0x5490 ,0x05},
{0x5491 ,0x00},
{0x5492 ,0x04},
{0x5493 ,0x20},
{0x5494 ,0x03},
{0x5495 ,0x60},
{0x5496 ,0x02},
{0x5497 ,0xB8},
{0x5498 ,0x02},
{0x5499 ,0x86},
{0x549A ,0x02},
{0x549B ,0x5B},
{0x549C ,0x02},
{0x549D ,0x3B},
{0x549E ,0x02},
{0x549F ,0x1C},
{0x54A0 ,0x02},
{0x54A1 ,0x04},
{0x54A2 ,0x01},
{0x54A3 ,0xED},
{0x54A4 ,0x01},
{0x54A5 ,0xC5},
{0x54A6 ,0x01},
{0x54A7 ,0xA5},
{0x54A8 ,0x01},
{0x54A9 ,0x6C},
{0x54AA ,0x01},
{0x54AB ,0x41},
{0x54AC ,0x01},
{0x54AD ,0x20},
{0x54AE ,0x00},
{0x54AF ,0x16},
{0x54B0 ,0x01},
{0x54B1 ,0x20},
{0x54B2 ,0x00},
{0x54B3 ,0x10},
{0x54B4 ,0x00},
{0x54B5 ,0xf0},
{0x54B6 ,0x00},
{0x54B7 ,0xDF},
{0x5402 ,0x3f},
{0x5403 ,0x00},
{0x5500 ,0x10},
{0x5502 ,0x00},
{0x5503 ,0x06},
{0x5504 ,0x00},
{0x5505 ,0x7f},
{0x5025 ,0x80},
{0x3a0f ,0x30},
{0x3a10 ,0x28},
{0x3a1b ,0x30},
{0x3a1e ,0x28},
{0x3a11 ,0x61},
{0x3a1f ,0x10},
{0x5688 ,0xfd},
{0x5689 ,0xdf},
{0x568a ,0xfe},
{0x568b ,0xef},
{0x568c ,0xfe},
{0x568d ,0xef},
{0x568e ,0xaa},
{0x568f ,0xaa},
{0xffff,0xff},
};
const struct sensor_reg OV5642_JPEG_Capture_QSXGA[] PROGMEM =
{
// OV5642_ QSXGA _YUV7.5 fps
// 24 MHz input clock, 24Mhz pclk
// jpeg mode 7.5fps
{0x3503 ,0x07}, //AEC Manual Mode Control
{0x3000 ,0x00}, //SYSTEM RESET00
{0x3001 ,0x00}, //Reset for Individual Block
{0x3002 ,0x00}, //Reset for Individual Block
{0x3003 ,0x00}, //Reset for Individual Block
{0x3005 ,0xff}, //Clock Enable Control
{0x3006 ,0xff}, //Clock Enable Control
{0x3007 ,0x3f}, //Clock Enable Control
{0x350c ,0x07}, //AEC VTS Output high bits
{0x350d ,0xd0}, //AEC VTS Output low bits
{0x3602 ,0xe4}, //Analog Control Registers
{0x3612 ,0xac}, //Analog Control Registers
{0x3613 ,0x44}, //Analog Control Registers
{0x3621 ,0x27}, //Array Control 01
{0x3622 ,0x08}, //Analog Control Registers
{0x3623 ,0x22}, //Analog Control Registers
{0x3604 ,0x60}, //Analog Control Registers
{0x3705 ,0xda}, //Analog Control Registers
{0x370a ,0x80}, //Analog Control Registers
{0x3801 ,0x8a}, //HS
{0x3803 ,0x0a}, //VS
{0x3804 ,0x0a}, //HW
{0x3805 ,0x20}, //HW
{0x3806 ,0x07}, //VH
{0x3807 ,0x98}, //VH
{0x3808 ,0x0a}, //DVPHO
{0x3809 ,0x20}, //DVPHO
{0x380a ,0x07}, //DVPVO
{0x380b ,0x98}, //DVPVO
{0x380c ,0x0c}, //HTS
{0x380d ,0x80}, //HTS
{0x380e ,0x07}, //VTS
{0x380f ,0xd0}, //VTS
{0x3810 ,0xc2},
{0x3815 ,0x44},
{0x3818 ,0xc8}, //Mirror NO, Compression enable
{0x3824 ,0x01}, //RSV
{0x3827 ,0x0a}, //RSV
{0x3a00 ,0x78}, //AEC System Control 0
{0x3a0d ,0x10}, //60 Hz Max Bands in One Frame
{0x3a0e ,0x0d}, //50 Hz Max Bands in One Frame
{0x3a10 ,0x32}, //Stable Range Low Limit (enter)
{0x3a1b ,0x3c}, //Stable Range High Limit (go out)
{0x3a1e ,0x32}, //Stable Range Low Limit (go out)
{0x3a11 ,0x80}, //Step Manual Mode, Fast Zone High Limit
{0x3a1f ,0x20}, //Step Manual Mode, Fast Zone Low Limit
{0x3a00 ,0x78}, //AEC System Control 0
{0x460b ,0x35}, //RSV VFIFO Control 0B
{0x471d ,0x00}, //DVP CONTROL 1D
{0x4713 ,0x03}, //COMPRESSION MODE SELECT mode3
{0x471c ,0x50}, //RSV
{0x5682 ,0x0a}, //AVG X END
{0x5683 ,0x20}, //AVG X END
{0x5686 ,0x07}, //AVG Y END
{0x5687 ,0x98}, //AVG Y END
{0x5001 ,0x4f}, //ISP CONTROL 01, UV adjust/Line stretch/UV average/Color matrix/AWB enable
{0x589b ,0x00}, //RSV
{0x589a ,0xc0}, //RSV
{0x4407 ,0x08}, //COMPRESSION CTRL07 Bit[5:0]: Quantization scale 0x02
{0x589b ,0x00}, //RSV
{0x589a ,0xc0}, //RSV
{0x3002 ,0x0c}, //Reset for Individual Block, Reset SFIFO/compression
{0x3002 ,0x00}, //Reset for Individual Block
{0x3503 ,0x00}, //AEC Manual Mode Control, Auto enable
//{0x3818, 0xa8},
//{0x3621, 0x17},
//{0x3801, 0xb0},
{0x5025, 0x80},
{0x3a0f, 0x48},
{0x3a10, 0x40},
{0x3a1b, 0x4a},
{0x3a1e, 0x3e},
{0x3a11, 0x70},
{0x3a1f, 0x20},
{0xffff, 0xff},
};
const struct sensor_reg OV5642_1080P_Video_setting[] PROGMEM =
{
{0x3103 ,0x93},
{0x3008 ,0x82},
{0x3017 ,0x7f},
{0x3018 ,0xfc},
{0x3810 ,0xc2},
{0x3615 ,0xf0},
{0x3000 ,0x00},
{0x3001 ,0x00},
{0x3002 ,0x00},
{0x3003 ,0x00},
{0x3004 ,0xff},
{0x3030 ,0x0b},
{0x3011 ,0x08},
{0x3010 ,0x10},
{0x3604 ,0x60},
{0x3622 ,0x60},
{0x3621 ,0x09},
{0x3709 ,0x00},
{0x4000 ,0x21},
...
This file has been truncated, please download it to see its full contents.
/*
ArduCAM.cpp - Arduino library support for CMOS Image Sensor
Copyright (C)2011-2015 ArduCAM.com. All right reserved
Basic functionality of this library are based on the demo-code provided by
ArduCAM.com. You can find the latest version of the library at
http://www.ArduCAM.com
Now supported controllers:
- OV7670
- MT9D111
- OV7675
- OV2640
- OV3640
- OV5642
- OV7660
- OV7725
- MT9M112
- MT9V111
- OV5640
- MT9M001
- MT9T112
- MT9D112
We will add support for many other sensors in next release.
Supported MCU platform
- Theoretically support all Arduino families
- Arduino UNO R3 (Tested)
- Arduino MEGA2560 R3 (Tested)
- Arduino Leonardo R3 (Tested)
- Arduino Nano (Tested)
- Arduino DUE (Tested)
- Arduino Yun (Tested)
- Raspberry Pi (Tested)
- ESP8266-12 (Tested)
If you make any modifications or improvements to the code, I would appreciate
that you share the code with me so that I might include it in the next release.
I can be contacted through http://www.ArduCAM.com
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
/*------------------------------------
Revision History:
2012/09/20 V1.0.0 by Lee first release
2012/10/23 V1.0.1 by Lee Resolved some timing issue for the Read/Write Register
2012/11/29 V1.1.0 by Lee Add support for MT9D111 sensor
2012/12/13 V1.2.0 by Lee Add support for OV7675 sensor
2012/12/28 V1.3.0 by Lee Add support for OV2640,OV3640,OV5642 sensors
2013/02/26 V2.0.0 by Lee New Rev.B shield hardware, add support for FIFO control
and support Mega1280/2560 boards
2013/05/28 V2.1.0 by Lee Add support all drawing functions derived from UTFT library
2013/08/24 V3.0.0 by Lee Support ArudCAM shield Rev.C hardware, features SPI interface and low power mode.
Support almost all series of Arduino boards including DUE.
2014/02/06 V3.0.1 by Lee Minor change to the library, fixed some bugs, add self test code to the sketches for easy debugging.
2014/03/09 V3.1.0 by Lee Add the more impressive example sketches.
Optimise the OV5642 settings, improve image quality.
Add live preview before JPEG capture.
Add play back photos one by one after BMP capture.
2014/05/01 V3.1.1 by Lee Minor changes to add support Arduino IDE for linux distributions.
2014/09/30 V3.2.0 by Lee Improvement on OV5642 camera dirver.
2014/10/06 V3.3.0 by Lee Add OV7660,OV7725 camera support.
2015/02/27 V3.4.0 by Lee Add the support for Arduino Yun board, update the latest UTFT library for ArduCAM.
2015/06/09 V3.4.1 by Lee Minor changes and add some comments
2015/06/19 V3.4.2 by Lee Add support for MT9M112 camera.
2015/06/20 V3.4.3 by Lee Add support for MT9V111 camera.
2015/06/22 V3.4.4 by Lee Add support for OV5640 camera.
2015/06/22 V3.4.5 by Lee Add support for MT9M001 camera.
2015/08/05 V3.4.6 by Lee Add support for MT9T112 camera.
2015/08/08 V3.4.7 by Lee Add support for MT9D112 camera.
2015/09/20 V3.4.8 by Lee Add support for ESP8266 processor.
2016/02/03 V3.4.9 by Lee Add support for Arduino ZERO board.
2016/06/07 V3.5.0 by Lee Add support for OV5642_CAM_BIT_ROTATION_FIXED.
2016/06/14 V3.5.1 by Lee Add support for ArduCAM-Mini-5MP-Plus OV5640_CAM.
2016/09/29 V3.5.2 by Lee Optimize the OV5642 register settings
2016/10/05 V4.0.0 by Lee Add support for second generation hardware platforms like ArduCAM shield V2, ArduCAM-Mini-5MP-Plus(OV5642/OV5640).
2016/10/28 V4.0.1 by Lee Add support for Raspberry Pi
--------------------------------------*/
#include "memorysaver.h"
#if defined ( RASPBERRY_PI )
#include <string.h>
#include <time.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <unistd.h>
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include "ArduCAM.h"
#include "arducam_arch_raspberrypi.h"
#elif defined (PARTICLE)
#include "ArduCAM.h"
#include "Arduino.h"
#else
#include "Arduino.h"
#include "ArduCAM.h"
#include <Wire.h>
#include <SPI.h>
#include "HardwareSerial.h"
#if defined(__SAM3X8E__)
#define Wire Wire1
#endif
#endif
ArduCAM::ArduCAM()
{
sensor_model = OV7670;
sensor_addr = 0x42;
}
ArduCAM::ArduCAM(byte model ,int CS)
{
#if defined (RASPBERRY_PI)
if(CS>=0)
{
B_CS = CS;
}
#else
#if defined(ESP8266)
B_CS = CS;
#else
P_CS = portOutputRegister(digitalPinToPort(CS));
B_CS = digitalPinToBitMask(CS);
#endif
#endif
#if defined (RASPBERRY_PI)
pinMode(CS, OUTPUT);
#else
pinMode(CS, OUTPUT);
sbi(P_CS, B_CS);
#endif
sensor_model = model;
switch (sensor_model)
{
case OV7660:
case OV7670:
case OV7675:
case OV7725:
#if defined (RASPBERRY_PI)
sensor_addr = 0x21;
#else
sensor_addr = 0x42;
#endif
break;
case MT9D111_A: //Standard MT9D111 module
sensor_addr = 0xba;
break;
case MT9D111_B: //Flex MT9D111 AF module
sensor_addr = 0x90;
break;
case MT9M112:
#if defined (RASPBERRY_PI)
sensor_addr = 0x5d;
#else
sensor_addr = 0x90;
#endif
break;
case MT9M001:
sensor_addr = 0xba;
break;
case OV3640:
case OV5640:
case OV5642:
case MT9T112:
case MT9D112:
#if defined (RASPBERRY_PI)
sensor_addr = 0x3c;
#else
sensor_addr = 0x78;
#endif
break;
case OV2640:
case OV9650:
case OV9655:
#if defined (RASPBERRY_PI)
sensor_addr = 0x30;
#else
sensor_addr = 0x60;
#endif
break;
default:
#if defined (RASPBERRY_PI)
sensor_addr = 0x21;
#else
sensor_addr = 0x42;
#endif
break;
}
#if defined (RASPBERRY_PI)
// initialize i2c:
if (!arducam_i2c_init(sensor_addr)) {
printf("ERROR: I2C init failed\n");
}
#endif
}
void ArduCAM::InitCAM()
{
switch (sensor_model)
{
case OV7660:
{
#if defined OV7660_CAM
wrSensorReg8_8(0x12, 0x80);
delay(100);
wrSensorRegs8_8(OV7660_QVGA);
#endif
break;
}
case OV7725:
{
#if defined OV7725_CAM
byte reg_val;
wrSensorReg8_8(0x12, 0x80);
delay(100);
wrSensorRegs8_8(OV7725_QVGA);
rdSensorReg8_8(0x15, ®_val);
wrSensorReg8_8(0x15, (reg_val | 0x02));
#endif
break;
}
case OV7670:
{
#if defined OV7670_CAM
wrSensorReg8_8(0x12, 0x80);
delay(100);
wrSensorRegs8_8(OV7670_QVGA);
#endif
break;
}
case OV7675:
{
#if defined OV7675_CAM
wrSensorReg8_8(0x12, 0x80);
delay(100);
wrSensorRegs8_8(OV7675_QVGA);
#endif
break;
}
case MT9D111_A:
case MT9D111_B:
{
#if defined MT9D111_CAM
wrSensorRegs8_16(MT9D111_QVGA_30fps);
delay(1000);
wrSensorReg8_16(0x97, 0x0020);
wrSensorReg8_16(0xf0, 0x00);
wrSensorReg8_16(0x21, 0x8403); //Mirror Column
wrSensorReg8_16(0xC6, 0xA103);//SEQ_CMD
wrSensorReg8_16(0xC8, 0x0005); //SEQ_CMD
#endif
break;
}
case OV5642:
{
#if ( defined(OV5642_CAM) || defined(OV5642_MINI_5MP) || defined(OV5642_MINI_5MP_BIT_ROTATION_FIXED) || defined(OV5642_MINI_5MP_PLUS) )
wrSensorReg16_8(0x3008, 0x80);
wrSensorRegs16_8(OV5642_QVGA_Preview);
#if defined (RASPBERRY_PI)
arducam_delay_ms(100);
#else
delay(100);
#endif
if (m_fmt == JPEG)
{
#if defined (RASPBERRY_PI)
arducam_delay_ms(100);
#else
delay(100);
#endif
wrSensorRegs16_8(OV5642_JPEG_Capture_QSXGA);
wrSensorRegs16_8(ov5642_320x240);
#if defined (RASPBERRY_PI)
arducam_delay_ms(100);
#else
delay(100);
#endif
wrSensorReg16_8(0x3818, 0xa8);
wrSensorReg16_8(0x3621, 0x10);
wrSensorReg16_8(0x3801, 0xb0);
#if (defined(OV5642_MINI_5MP_PLUS) || (defined ARDUCAM_SHIELD_V2))
wrSensorReg16_8(0x4407, 0x04);
#else
wrSensorReg16_8(0x4407, 0x0C);
#endif
}
else
{
byte reg_val;
wrSensorReg16_8(0x4740, 0x21);
wrSensorReg16_8(0x501e, 0x2a);
wrSensorReg16_8(0x5002, 0xf8);
wrSensorReg16_8(0x501f, 0x01);
wrSensorReg16_8(0x4300, 0x61);
rdSensorReg16_8(0x3818, ®_val);
wrSensorReg16_8(0x3818, (reg_val | 0x60) & 0xff);
rdSensorReg16_8(0x3621, ®_val);
wrSensorReg16_8(0x3621, reg_val & 0xdf);
}
#endif
break;
}
case OV5640:
{
#if ( defined(OV5640_CAM) || defined(OV5640_MINI_5MP_PLUS) )
delay(100);
if (m_fmt == JPEG)
{
wrSensorReg16_8(0x3103, 0x11);
wrSensorReg16_8(0x3008, 0x82);
delay(100);
wrSensorRegs16_8(OV5640YUV_Sensor_Dvp_Init);
delay(500);
wrSensorRegs16_8(OV5640_JPEG_QSXGA);
wrSensorRegs16_8(OV5640_QSXGA2QVGA);
#if (defined(OV5640_MINI_5MP_PLUS) || (defined ARDUCAM_SHIELD_V2))
wrSensorReg16_8(0x4407, 0x04);
#else
wrSensorReg16_8(0x4407, 0x0C);
#endif
}
else
{
wrSensorReg16_8(0x3103, 0x11);
wrSensorReg16_8(0x3008, 0x82);
delay(500);
wrSensorRegs16_8(OV5640YUV_Sensor_Dvp_Init);
wrSensorRegs16_8(OV5640_RGB_QVGA);
}
#endif
break;
}
case OV3640:
{
#if defined OV3640_CAM
rtn = wrSensorRegs16_8(OV3640_QVGA);
#endif
break;
}
case OV2640:
{
#if (defined(OV2640_CAM) || defined(OV2640_MINI_2MP))
wrSensorReg8_8(0xff, 0x01);
wrSensorReg8_8(0x12, 0x80);
delay(100);
if (m_fmt == JPEG)
{
wrSensorRegs8_8(OV2640_JPEG_INIT);
wrSensorRegs8_8(OV2640_YUV422);
wrSensorRegs8_8(OV2640_JPEG);
wrSensorReg8_8(0xff, 0x01);
wrSensorReg8_8(0x15, 0x00);
wrSensorRegs8_8(OV2640_320x240_JPEG);
//wrSensorReg8_8(0xff, 0x00);
//wrSensorReg8_8(0x44, 0x32);
}
else
{
wrSensorRegs8_8(OV2640_QVGA);
}
#endif
break;
}
case OV9655:
{
break;
}
case MT9M112:
{
#if defined MT9M112_CAM
wrSensorRegs8_16(MT9M112_QVGA);
#endif
break;
}
case MT9V111:
{
#if defined MT9V111_CAM
//Reset sensor core
wrSensorReg8_16(0x01, 0x04);
wrSensorReg8_16(0x0D, 0x01);
wrSensorReg8_16(0x0D, 0x00);
//Reset IFP
wrSensorReg8_16(0x01, 0x01);
wrSensorReg8_16(0x07, 0x01);
wrSensorReg8_16(0x07, 0x00);
delay(100);
wrSensorRegs8_16(MT9V111_QVGA);
//delay(1000);
wrSensorReg8_16(0x97, 0x0020);
wrSensorReg8_16(0xf0, 0x00);
wrSensorReg8_16(0x21, 0x8403); //Mirror Column
wrSensorReg8_16(0xC6, 0xA103);//SEQ_CMD
wrSensorReg8_16(0xC8, 0x0005); //SEQ_CMD
#endif
break;
}
case MT9M001:
{
#if defined MT9M001_CAM
wrSensorRegs8_16(MT9M001_QVGA_30fps);
#endif
break;
}
case MT9T112:
{
#if defined MT9T112_CAM
wrSensorReg16_16(0x001a , 0x0219 );
wrSensorReg16_16(0x001a , 0x0018 );
//reset camera
wrSensorReg16_16(0x0014 , 0x2425 );
wrSensorReg16_16(0x0014 , 0x2145 );
wrSensorReg16_16(0x0010 , 0x0110 );
wrSensorReg16_16(0x0012 , 0x00f0 );
wrSensorReg16_16(0x002a , 0x7f77 );
wrSensorReg16_16(0x0014 , 0x2545 );
wrSensorReg16_16(0x0014 , 0x2547 );
wrSensorReg16_16(0x0014 , 0x3447 );
wrSensorReg16_16(0x0014 , 0x3047 );
delay(10);
wrSensorReg16_16(0x0014 , 0x3046 );
wrSensorReg16_16(0x0022 , 0x01f4 );
wrSensorReg16_16(0x001e , 0x0707 );
wrSensorReg16_16(0x3b84 , 0x01f4 );
wrSensorReg16_16(0x002e , 0x0500 );
wrSensorReg16_16(0x0018 , 0x402b );
wrSensorReg16_16(0x3b82 , 0x0004 );
wrSensorReg16_16(0x0018 , 0x402f );
wrSensorReg16_16(0x0018 , 0x402e );
delay(50);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
wrSensorReg16_16(0x0614 , 0x0001 );
delay(1);
delay(10);
//init pll
wrSensorReg16_16(0x098e , 0x6800 );
wrSensorReg16_16(0x0990 , 0x0140 );
wrSensorReg16_16(0x098e , 0x6802 );
wrSensorReg16_16(0x0990 , 0x00f0 );
wrSensorReg16_16(0x098e , 0x68a0 );
wrSensorReg16_16(0x098e , 0x68a0 );
wrSensorReg16_16(0x0990 , 0x082d );
wrSensorReg16_16(0x098e , 0x4802 );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0x4804 );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0x4806 );
wrSensorReg16_16(0x0990 , 0x060d );
wrSensorReg16_16(0x098e , 0x4808 );
wrSensorReg16_16(0x0990 , 0x080d );
wrSensorReg16_16(0x098e , 0x480c );
wrSensorReg16_16(0x0990 , 0x046c );
wrSensorReg16_16(0x098e , 0x480f );
wrSensorReg16_16(0x0990 , 0x00cc );
wrSensorReg16_16(0x098e , 0x4811 );
wrSensorReg16_16(0x0990 , 0x0381 );
wrSensorReg16_16(0x098e , 0x4813 );
wrSensorReg16_16(0x0990 , 0x024f );
wrSensorReg16_16(0x098e , 0x481d );
wrSensorReg16_16(0x0990 , 0x0436 );
wrSensorReg16_16(0x098e , 0x481f );
wrSensorReg16_16(0x0990 , 0x05d0 );
wrSensorReg16_16(0x098e , 0x4825 );
wrSensorReg16_16(0x0990 , 0x1153 );
wrSensorReg16_16(0x098e , 0x6ca0 );
wrSensorReg16_16(0x098e , 0x6ca0 );
wrSensorReg16_16(0x0990 , 0x082d );
wrSensorReg16_16(0x098e , 0x484a );
wrSensorReg16_16(0x0990 , 0x0004 );
wrSensorReg16_16(0x098e , 0x484c );
wrSensorReg16_16(0x0990 , 0x0004 );
wrSensorReg16_16(0x098e , 0x484e );
wrSensorReg16_16(0x0990 , 0x060b );
wrSensorReg16_16(0x098e , 0x4850 );
wrSensorReg16_16(0x0990 , 0x080b );
wrSensorReg16_16(0x098e , 0x4857 );
wrSensorReg16_16(0x0990 , 0x008c );
wrSensorReg16_16(0x098e , 0x4859 );
wrSensorReg16_16(0x0990 , 0x01f1 );
wrSensorReg16_16(0x098e , 0x485b );
wrSensorReg16_16(0x0990 , 0x00ff );
wrSensorReg16_16(0x098e , 0x4865 );
wrSensorReg16_16(0x0990 , 0x0668 );
wrSensorReg16_16(0x098e , 0x4867 );
wrSensorReg16_16(0x0990 , 0x0af0 );
wrSensorReg16_16(0x098e , 0x486d );
wrSensorReg16_16(0x0990 , 0x0af0 );
wrSensorReg16_16(0x098e , 0xa005 );
wrSensorReg16_16(0x0990 , 0x0001 );
wrSensorReg16_16(0x098e , 0x6c11 );
wrSensorReg16_16(0x0990 , 0x0003 );
wrSensorReg16_16(0x098e , 0x6811 );
wrSensorReg16_16(0x0990 , 0x0003 );
wrSensorReg16_16(0x098e , 0xc8a5 );
wrSensorReg16_16(0x0990 , 0x0025 );
wrSensorReg16_16(0x098e , 0xc8a6 );
wrSensorReg16_16(0x0990 , 0x0028 );
wrSensorReg16_16(0x098e , 0xc8a7 );
wrSensorReg16_16(0x0990 , 0x002c );
wrSensorReg16_16(0x098e , 0xc8a8 );
wrSensorReg16_16(0x0990 , 0x002f );
wrSensorReg16_16(0x098e , 0xc844 );
wrSensorReg16_16(0x0990 , 0x00ba );
wrSensorReg16_16(0x098e , 0xc92f );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0xc845 );
wrSensorReg16_16(0x0990 , 0x009b );
wrSensorReg16_16(0x098e , 0xc92d );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0xc88c );
wrSensorReg16_16(0x0990 , 0x0082 );
wrSensorReg16_16(0x098e , 0xc930 );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0xc88d );
wrSensorReg16_16(0x0990 , 0x006d );
wrSensorReg16_16(0x098e , 0xc92e );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x098e , 0xa002 );
wrSensorReg16_16(0x0990 , 0x0010 );
wrSensorReg16_16(0x098e , 0xa009 );
wrSensorReg16_16(0x0990 , 0x0002 );
wrSensorReg16_16(0x098e , 0xa00a );
wrSensorReg16_16(0x0990 , 0x0003 );
wrSensorReg16_16(0x098e , 0xa00c );
wrSensorReg16_16(0x0990 , 0x000a );
wrSensorReg16_16(0x098e , 0x4846 );
wrSensorReg16_16(0x0990 , 0x0014 );
wrSensorReg16_16(0x098e , 0x488e );
wrSensorReg16_16(0x0990 , 0x0014 );
wrSensorReg16_16(0x098e , 0xc844 );
wrSensorReg16_16(0x0990 , 0x0085 );
wrSensorReg16_16(0x098e , 0xc845 );
wrSensorReg16_16(0x0990 , 0x006e );
wrSensorReg16_16(0x098e , 0xc88c );
wrSensorReg16_16(0x0990 , 0x0082 );
wrSensorReg16_16(0x098e , 0xc88d );
wrSensorReg16_16(0x0990 , 0x006c );
wrSensorReg16_16(0x098e , 0xc8a5 );
wrSensorReg16_16(0x0990 , 0x001b );
wrSensorReg16_16(0x098e , 0xc8a6 );
wrSensorReg16_16(0x0990 , 0x001e );
wrSensorReg16_16(0x098e , 0xc8a7 );
wrSensorReg16_16(0x0990 , 0x0020 );
wrSensorReg16_16(0x098e , 0xc8a8 );
wrSensorReg16_16(0x0990 , 0x0023 );
//init setting
wrSensorReg16_16(0x0018 , 0x002a );
wrSensorReg16_16(0x3084 , 0x2409 );
wrSensorReg16_16(0x3092 , 0x0a49 );
wrSensorReg16_16(0x3094 , 0x4949 );
wrSensorReg16_16(0x3096 , 0x4950 );
wrSensorReg16_16(0x098e , 0x68a0 );
wrSensorReg16_16(0x0990 , 0x0a2e );
wrSensorReg16_16(0x098e , 0x6ca0 );
wrSensorReg16_16(0x0990 , 0x0a2e );
wrSensorReg16_16(0x098e , 0x6c90 );
wrSensorReg16_16(0x0990 , 0x0cb4 );
wrSensorReg16_16(0x098e , 0x6807 );
wrSensorReg16_16(0x0990 , 0x0004 );
wrSensorReg16_16(0x098e , 0xe88e );
wrSensorReg16_16(0x0990 , 0x0000 );
wrSensorReg16_16(0x316c , 0x350f );
wrSensorReg16_16(0x001e , 0x0777 );
wrSensorReg16_16(0x098e , 0x8400 );
wrSensorReg16_16(0x0990 , 0x0001 );
delay(100);
wrSensorReg16_16(0x098e , 0x8400 );
wrSensorReg16_16(0x0990 , 0x0006 );
//Serial.println("MT9T112 init done");
#endif
break;
}
case MT9D112:
{
#if defined MT9D112_CAM
wrSensorReg16_16(0x301a , 0x0acc );
wrSensorReg16_16(0x3202 , 0x0008 );
delay(100 );
wrSensorReg16_16(0x341e , 0x8f09 );
wrSensorReg16_16(0x341c , 0x020c );
delay(100 );
wrSensorRegs16_16(MT9D112_default_setting);
wrSensorReg16_16(0x338c , 0xa103 );
wrSensorReg16_16(0x3390 , 0x0006 );
delay(100 );
wrSensorReg16_16(0x338c , 0xa103 );
wrSensorReg16_16(0x3390 , 0x0005 );
delay(100 );
wrSensorRegs16_16(MT9D112_soc_init);
delay(200);
wrSensorReg16_16(0x332E, 0x0020); //RGB565
#endif
}
default:
break;
}
}
void ArduCAM::flush_fifo(void)
{
write_reg(ARDUCHIP_FIFO, FIFO_CLEAR_MASK);
}
void ArduCAM::start_capture(void)
{
write_reg(ARDUCHIP_FIFO, FIFO_START_MASK);
}
void ArduCAM::clear_fifo_flag(void )
{
write_reg(ARDUCHIP_FIFO, FIFO_CLEAR_MASK);
}
uint32_t ArduCAM::read_fifo_length(void)
{
uint32_t len1,len2,len3,length=0;
len1 = read_reg(FIFO_SIZE1);
len2 = read_reg(FIFO_SIZE2);
len3 = read_reg(FIFO_SIZE3) & 0x7f;
length = ((len3 << 16) | (len2 << 8) | len1) & 0x07fffff;
return length;
}
#if defined (RASPBERRY_PI)
uint8_t ArduCAM::transfer(uint8_t data)
{
uint8_t temp;
temp = arducam_spi_transfer(data);
return temp;
}
void ArduCAM::transfers(uint8_t *buf, uint32_t size)
{
arducam_spi_transfers(buf, size);
}
#endif
void ArduCAM::set_fifo_burst()
{
#if defined (RASPBERRY_PI)
transfer(BURST_FIFO_READ);
#else
SPI.transfer(BURST_FIFO_READ);
#endif
}
void ArduCAM::CS_HIGH(void)
{
sbi(P_CS, B_CS);
}
void ArduCAM::CS_LOW(void)
{
cbi(P_CS, B_CS);
}
uint8_t ArduCAM::read_fifo(void)
{
uint8_t data;
data = bus_read(SINGLE_FIFO_READ);
return data;
}
uint8_t ArduCAM::read_reg(uint8_t addr)
{
uint8_t data;
#if defined (RASPBERRY_PI)
data = bus_read(addr);
#else
data = bus_read(addr & 0x7F);
#endif
return data;
}
void ArduCAM::write_reg(uint8_t addr, uint8_t data)
{
#if defined (RASPBERRY_PI)
bus_write(addr , data);
#else
bus_write(addr | 0x80, data);
#endif
}
//My add
//Set corresponding bit
void ArduCAM::set_bit(uint8_t addr, uint8_t bit)
{
uint8_t temp;
temp = read_reg(addr);
write_reg(addr, temp | bit);
}
//Clear corresponding bit
void ArduCAM::clear_bit(uint8_t addr, uint8_t bit)
{
uint8_t temp;
temp = read_reg(addr);
write_reg(addr, temp & (~bit));
}
//Get corresponding bit status
uint8_t ArduCAM::get_bit(uint8_t addr, uint8_t bit)
{
uint8_t temp;
temp = read_reg(addr);
temp = temp & bit;
return temp;
}
//Set ArduCAM working mode
//MCU2LCD_MODE: MCU writes the LCD screen GRAM
//CAM2LCD_MODE: Camera takes control of the LCD screen
//LCD2MCU_MODE: MCU read the LCD screen GRAM
void ArduCAM::set_mode(uint8_t mode)
{
switch (mode)
{
case MCU2LCD_MODE:
write_reg(ARDUCHIP_MODE, MCU2LCD_MODE);
break;
case CAM2LCD_MODE:
write_reg(ARDUCHIP_MODE, CAM2LCD_MODE);
break;
case LCD2MCU_MODE:
write_reg(ARDUCHIP_MODE, LCD2MCU_MODE);
break;
default:
write_reg(ARDUCHIP_MODE, MCU2LCD_MODE);
break;
}
}
uint8_t ArduCAM::bus_write(int address,int value)
{
#if defined (PARTICLE)
SPI.beginTransaction(SPISettings(8*MHZ, MSBFIRST, SPI_MODE0));
#endif
cbi(P_CS, B_CS);
#if defined (RASPBERRY_PI)
arducam_spi_write(address | 0x80, value);
#else
SPI.transfer(address);
SPI.transfer(value);
#endif
sbi(P_CS, B_CS);
#if defined (PARTICLE)
SPI.endTransaction();
#endif
return 1;
}
uint8_t ArduCAM:: bus_read(int address)
{
#if defined (PARTICLE)
SPI.beginTransaction(SPISettings(8*MHZ, MSBFIRST, SPI_MODE0));
#endif
uint8_t value;
cbi(P_CS, B_CS);
#if defined (RASPBERRY_PI)
value = arducam_spi_read(address & 0x7F);
sbi(P_CS, B_CS);
#if defined (PARTICLE)
SPI.endTransaction();
#endif
return value;
#else
#if (defined(ESP8266) || defined(__arm__))
#if defined(OV5642_MINI_5MP)
SPI.transfer(address);
value = SPI.transfer(0x00);
// correction for bit rotation from readback
value = (byte)(value >> 1) | (value << 7);
// take the SS pin high to de-select the chip:
sbi(P_CS, B_CS);
#if defined (PARTICLE)
SPI.endTransaction();
#endif
return value;
#else
SPI.transfer(address);
value = SPI.transfer(0x00);
// take the SS pin high to de-select the chip:
sbi(P_CS, B_CS);
#if defined (PARTICLE)
SPI.endTransaction();
#endif
return value;
#endif
#else
SPI.transfer(address);
value = SPI.transfer(0x00);
// take the SS pin high to de-select the chip:
sbi(P_CS, B_CS);
#if defined (PARTICLE)
SPI.endTransaction();
#endif
return value;
#endif
#endif
}
void ArduCAM::OV2640_set_JPEG_size(uint8_t size)
{
#if (defined (OV2640_CAM)||defined (OV2640_MINI_2MP))
switch(size)
{
case OV2640_160x120:
wrSensorRegs8_8(OV2640_160x120_JPEG);
break;
case OV2640_176x144:
wrSensorRegs8_8(OV2640_176x144_JPEG);
break;
case OV2640_320x240:
wrSensorRegs8_8(OV2640_320x240_JPEG);
break;
case OV2640_352x288:
wrSensorRegs8_8(OV2640_352x288_JPEG);
break;
case OV2640_640x480:
wrSensorRegs8_8(OV2640_640x480_JPEG);
break;
case OV2640_800x600:
wrSensorRegs8_8(OV2640_800x600_JPEG);
break;
case OV2640_1024x768:
wrSensorRegs8_8(OV2640_1024x768_JPEG);
break;
case OV2640_1280x1024:
wrSensorRegs8_8(OV2640_1280x1024_JPEG);
break;
case OV2640_1600x1200:
wrSensorRegs8_8(OV2640_1600x1200_JPEG);
break;
default:
wrSensorRegs8_8(OV2640_320x240_JPEG);
break;
}
#endif
}
void ArduCAM::OV5642_set_JPEG_size(uint8_t size)
{
#if defined(OV5642_CAM) || defined(OV5642_CAM_BIT_ROTATION_FIXED)|| defined(OV5642_MINI_5MP) || defined (OV5642_MINI_5MP_PLUS)
uint8_t reg_val;
switch (size)
{
case OV5642_320x240:
wrSensorRegs16_8(ov5642_320x240);
break;
case OV5642_640x480:
wrSensorRegs16_8(ov5642_640x480);
break;
case OV5642_1024x768:
wrSensorRegs16_8(ov5642_1024x768);
break;
case OV5642_1280x960:
wrSensorRegs16_8(ov5642_1280x960);
break;
case OV5642_1600x1200:
wrSensorRegs16_8(ov5642_1600x1200);
break;
case OV5642_2048x1536:
wrSensorRegs16_8(ov5642_2048x1536);
break;
case OV5642_2592x1944:
wrSensorRegs16_8(ov5642_2592x1944);
break;
default:
wrSensorRegs16_8(ov5642_320x240);
break;
}
#endif
}
void ArduCAM::OV5640_set_JPEG_size(uint8_t size)
{
#if (defined (OV5640_CAM)||defined (OV5640_MINI_5MP_PLUS))
switch (size)
{
case OV5640_320x240:
wrSensorRegs16_8(OV5640_QSXGA2QVGA);
break;
case OV5640_352x288:
wrSensorRegs16_8(OV5640_QSXGA2CIF);
break;
case OV5640_640x480:
wrSensorRegs16_8(OV5640_QSXGA2VGA);
break;
case OV5640_800x480:
wrSensorRegs16_8(OV5640_QSXGA2WVGA);
break;
case OV5640_1024x768:
wrSensorRegs16_8(OV5640_QSXGA2XGA);
break;
case OV5640_1280x960:
wrSensorRegs16_8(OV5640_QSXGA2SXGA);
break;
case OV5640_1600x1200:
wrSensorRegs16_8(OV5640_QSXGA2UXGA);
break;
case OV5640_2048x1536:
wrSensorRegs16_8(OV5640_QSXGA2QXGA);
break;
case OV5640_2592x1944:
wrSensorRegs16_8(OV5640_JPEG_QSXGA);
break;
default:
//320x240
wrSensorRegs16_8(OV5640_QSXGA2QVGA);
break;
}
#endif
}
void ArduCAM::set_format(byte fmt)
{
if (fmt == BMP)
m_fmt = BMP;
else
m_fmt = JPEG;
}
// Write 8 bit values to 8 bit register address
int ArduCAM::wrSensorRegs8_8(const struct sensor_reg reglist[])
{
#if defined (RASPBERRY_PI)
arducam_i2c_write_regs(reglist);
#else
int err = 0;
uint16_t reg_addr = 0;
uint16_t reg_val = 0;
const struct sensor_reg *next = reglist;
while ((reg_addr != 0xff) | (reg_val != 0xff))
{
reg_addr = pgm_read_word(&next->reg);
reg_val = pgm_read_word(&next->val);
err = wrSensorReg8_8(reg_addr, reg_val);
next++;
#if defined(ESP8266)
yield();
#endif
}
#endif
return 1;
}
// Write 16 bit values to 8 bit register address
int ArduCAM::wrSensorRegs8_16(const struct sensor_reg reglist[])
{
#if defined (RASPBERRY_PI)
arducam_i2c_write_regs16(reglist);
#else
int err = 0;
unsigned int reg_addr, reg_val;
const struct sensor_reg *next = reglist;
while ((reg_addr != 0xff) | (reg_val != 0xffff))
{
#if defined (RASPBERRY_PI)
...
This file has been truncated, please download it to see its full contents.
// Sketch for Particle Photon - PIR Sensor / Motion Detection
int inputPin = D0; // choose the input pin (for PIR sensor)
int ledPin = D1; // LED Pin
int pirState = LOW; // we start, assuming no motion detected
int val = 0; // variable for reading the pin status
int ActivityFrequency = 0;
int ActivityFrequency1 = 0;
int count = 0;
int calibrateTime = 10000; // wait for the thingy to calibrate
//Timer timer(6000, updateThingspeak);
const String key = "your key here"; //thingspeak write key
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(inputPin, INPUT); // declare sensor as input
Particle.subscribe("status_start", camstart, "27003d000d47343438323536" );
//Particle.subscribe("status_done", camdone, "27003d000d47343438323536" );
//timer.start();
}
void loop() {
// if the sensor is calibrated
if (calibrated()) {
// get the data from the sensor
readTheSensor();
// report it out, if the state has changed
reportTheData();
}
}
void readTheSensor() {
val = digitalRead(inputPin);
}
bool calibrated() {
return millis() - calibrateTime > 0;
}
void setLED(int state) {
digitalWrite(ledPin, state);
}
void camstart(const char *event, const char *data) {
ActivityFrequency = atof(data);
}
void reportTheData() {
if (val == HIGH) {
// the current state is no motion
// i.e. it's just changed
// announce this change by publishing an event
if (pirState == LOW) {
// we have just turned on
Particle.publish("KN_motion", "Motion Detected", PUBLIC);
// Update the current state
count++;
Serial.print("Updating Thingspeak:");
Serial.print(count);
Particle.publish("activity frequency", String(ActivityFrequency));
Particle.publish("thingSpeakWrite_All", +
"{ \"1\": \"" + String(ActivityFrequency) + "\"," +
"\"k\": \"" + key + "\" }", 60, PRIVATE);
pirState = HIGH;
setLED(pirState);
delay (5*1000);
pirState = LOW;
if (ActivityFrequency == 1) {
delay (1000);
Particle.publish("delay", "Delaying for image to process", PUBLIC); //prevent publishing more often than once every 10 seconds
val == LOW;
setLED(LOW);
}
} else {
//if (pirState == HIGH)
// we have just turned off
// Update the current state
//Particle.publish("KN_motion", "Off", PRIVATE);
ActivityFrequency1 = 0;
pirState = LOW;
setLED(pirState);
}
}
}
/*
ArduCAM.h - Arduino library support for CMOS Image Sensor
Copyright (C)2011-2015 ArduCAM.com. All right reserved
Basic functionality of this library are based on the demo-code provided by
ArduCAM.com. You can find the latest version of the library at
http://www.ArduCAM.com
Now supported controllers:
- OV7670
- MT9D111
- OV7675
- OV2640
- OV3640
- OV5642
- OV5640
- OV7660
- OV7725
- MT9M112
- MT9V111
- OV5640
- MT9M001
- MT9T112
- MT9D112
We will add support for many other sensors in next release.
Supported MCU platform
- Theoretically support all Arduino families
- Arduino UNO R3 (Tested)
- Arduino MEGA2560 R3 (Tested)
- Arduino Leonardo R3 (Tested)
- Arduino Nano (Tested)
- Arduino DUE (Tested)
- Arduino Yun (Tested)
- Raspberry Pi (Tested)
- ESP8266-12 (Tested)
If you make any modifications or improvements to the code, I would appreciate
that you share the code with me so that I might include it in the next release.
I can be contacted through http://www.ArduCAM.com
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
/*------------------------------------
Revision History:
2012/09/20 V1.0.0 by Lee first release
2012/10/23 V1.0.1 by Lee Resolved some timing issue for the Read/Write Register
2012/11/29 V1.1.0 by Lee Add support for MT9D111 sensor
2012/12/13 V1.2.0 by Lee Add support for OV7675 sensor
2012/12/28 V1.3.0 by Lee Add support for OV2640,OV3640,OV5642 sensors
2013/02/26 V2.0.0 by Lee New Rev.B shield hardware, add support for FIFO control
and support Mega1280/2560 boards
2013/05/28 V2.1.0 by Lee Add support all drawing functions derived from UTFT library
2013/08/24 V3.0.0 by Lee Support ArudCAM shield Rev.C hardware, features SPI interface and low power mode.
Support almost all series of Arduino boards including DUE.
2014/03/09 V3.1.0 by Lee Add the more impressive example sketches.
Optimise the OV5642 settings, improve image quality.
Add live preview before JPEG capture.
Add play back photos one by one after BMP capture.
2014/05/01 V3.1.1 by Lee Minor changes to add support Arduino IDE for linux distributions.
2014/09/30 V3.2.0 by Lee Improvement on OV5642 camera dirver.
2014/10/06 V3.3.0 by Lee Add OV7660,OV7725 camera support.
2015/02/27 V3.4.0 by Lee Add the support for Arduino Yun board, update the latest UTFT library for ArduCAM.
2015/06/09 V3.4.1 by Lee Minor changes and add some comments
2015/06/19 V3.4.2 by Lee Add support for MT9M112 camera.
2015/06/20 V3.4.3 by Lee Add support for MT9V111 camera.
2015/06/22 V3.4.4 by Lee Add support for OV5640 camera.
2015/06/22 V3.4.5 by Lee Add support for MT9M001 camera.
2015/08/05 V3.4.6 by Lee Add support for MT9T112 camera.
2015/08/08 V3.4.7 by Lee Add support for MT9D112 camera.
2015/09/20 V3.4.8 by Lee Add support for ESP8266 processor.
2016/02/03 V3.4.9 by Lee Add support for Arduino ZERO board.
2016/06/07 V3.5.0 by Lee Add support for OV5642_CAM_BIT_ROTATION_FIXED.
2016/06/14 V3.5.1 by Lee Add support for ArduCAM-Mini-5MP-Plus OV5640_CAM.
2016/09/29 V3.5.2 by Lee Optimize the OV5642 register settings
2016/10/05 V4.0.0 by Lee Add support for second generation of ArduCAM shield V2, ArduCAM-Mini-5MP-Plus(OV5642/OV5640).
2016/10/28 V4.0.1 by Lee Add support for Raspberry Pi.
2017/01/22 V4.0.2 by Lee Add support for OV3640 camera.
--------------------------------------*/
#ifndef ArduCAM_H
#define ArduCAM_H
#include "memorysaver.h"
#if defined ( RASPBERRY_PI )
#elif defined ( PARTICLE )
#include "application.h"
#include "Arduino.h"
#else
#include "Arduino.h"
#include <pins_arduino.h>
#include "memorysaver.h"
#endif
#if defined (__AVR__)
#define cbi(reg, bitmask) *reg &= ~bitmask
#define sbi(reg, bitmask) *reg |= bitmask
#define pulse_high(reg, bitmask) sbi(reg, bitmask); cbi(reg, bitmask);
#define pulse_low(reg, bitmask) cbi(reg, bitmask); sbi(reg, bitmask);
#define cport(port, data) port &= data
#define sport(port, data) port |= data
#define swap(type, i, j) {type t = i; i = j; j = t;}
#define fontbyte(x) pgm_read_byte(&cfont.font[x])
#define regtype volatile uint8_t
#define regsize uint8_t
#endif
#if defined(__SAM3X8E__)
#define cbi(reg, bitmask) *reg &= ~bitmask
#define sbi(reg, bitmask) *reg |= bitmask
#define pulse_high(reg, bitmask) sbi(reg, bitmask); cbi(reg, bitmask);
#define pulse_low(reg, bitmask) cbi(reg, bitmask); sbi(reg, bitmask);
#define cport(port, data) port &= data
#define sport(port, data) port |= data
#define swap(type, i, j) {type t = i; i = j; j = t;}
#define fontbyte(x) cfont.font[x]
#define regtype volatile uint32_t
#define regsize uint32_t
#define PROGMEM
#define pgm_read_byte(x) (*((char *)x))
#define pgm_read_word(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x)))
#define pgm_read_byte_near(x) (*((char *)x))
#define pgm_read_byte_far(x) (*((char *)x))
#define pgm_read_word_near(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x)))
#define pgm_read_word_far(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x))))
#define PSTR(x) x
#if defined F
#undef F
#endif
#define F(X) (X)
#endif
#if defined(ESP8266)
#define cbi(reg, bitmask) digitalWrite(bitmask, LOW)
#define sbi(reg, bitmask) digitalWrite(bitmask, HIGH)
#define pulse_high(reg, bitmask) sbi(reg, bitmask); cbi(reg, bitmask);
#define pulse_low(reg, bitmask) cbi(reg, bitmask); sbi(reg, bitmask);
#define cport(port, data) port &= data
#define sport(port, data) port |= data
#define swap(type, i, j) {type t = i; i = j; j = t;}
#define fontbyte(x) cfont.font[x]
#define regtype volatile uint32_t
#define regsize uint32_t
#endif
#if defined(__CPU_ARC__)
#define cbi(reg, bitmask) *reg &= ~bitmask
#define sbi(reg, bitmask) *reg |= bitmask
#define pulse_high(reg, bitmask) sbi(reg, bitmask); cbi(reg, bitmask);
#define pulse_low(reg, bitmask) cbi(reg, bitmask); sbi(reg, bitmask);
#define cport(port, data) port &= data
#define sport(port, data) port |= data
#define swap(type, i, j) {type t = i; i = j; j = t;}
#define fontbyte(x) pgm_read_byte(&cfont.font[x])
#define regtype volatile uint32_t
#define regsize uint32_t
#endif
#if defined(__arm__)
#if defined (PARTICLE)
#define regtype volatile uint32_t
#define regsize uint32_t
//workaround for the deferencing issue, fix when issue is resolved.
// #define sbi(sfr, bit) ((*sfr) |= _BV(bit))
// #define cbi(sfr, bit) ((*sfr) &= ~_BV(bit))
//big hack here
#define pinLO(_pin) (PIN_MAP[_pin].gpio_peripheral->BSRRH = PIN_MAP[_pin].gpio_pin)
#define pinHI(_pin) (PIN_MAP[_pin].gpio_peripheral->BSRRL = PIN_MAP[_pin].gpio_pin)
#define cbi(_pin, bit) pinLO(A2)
#define sbi(_pin, bit) pinHI(A2)
#elif defined (RASPBERRY_PI)
#define regtype volatile uint32_t
#define regsize uint32_t
#define byte uint8_t
#define cbi(reg, bitmask) digitalWrite(bitmask, LOW)
#define sbi(reg, bitmask) digitalWrite(bitmask, HIGH)
#define PROGMEM
#define PSTR(x) x
#if defined F
#undef F
#endif
#define F(X) (X)
#else
#define cbi(reg, bitmask) *reg &= ~bitmask
#define sbi(reg, bitmask) *reg |= bitmask
#define pulse_high(reg, bitmask) sbi(reg, bitmask); cbi(reg, bitmask);
#define pulse_low(reg, bitmask) cbi(reg, bitmask); sbi(reg, bitmask);
#define cport(port, data) port &= data
#define sport(port, data) port |= data
#define swap(type, i, j) {type t = i; i = j; j = t;}
#define fontbyte(x) cfont.font[x]
#define regtype volatile uint32_t
#define regsize uint32_t
#define PROGMEM
#define pgm_read_byte(x) (*((char *)x))
// #define pgm_read_word(x) (*((short *)(x & 0xfffffffe)))
#define pgm_read_word(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x)))
#define pgm_read_byte_near(x) (*((char *)x))
#define pgm_read_byte_far(x) (*((char *)x))
// #define pgm_read_word_near(x) (*((short *)(x & 0xfffffffe))
// #define pgm_read_word_far(x) (*((short *)(x & 0xfffffffe)))
#define pgm_read_word_near(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x)))
#define pgm_read_word_far(x) ( ((*((unsigned char *)x + 1)) << 8) + (*((unsigned char *)x))))
#define PSTR(x) x
#if defined F
#undef F
#endif
#define F(X) (X)
#endif
#endif
/****************************************************/
/* Sensor related definition */
/****************************************************/
#define BMP 0
#define JPEG 1
#define RAW 2
#define OV7670 0
#define MT9D111_A 1
#define OV7675 2
#define OV5642 3
#define OV3640 4
#define OV2640 5
#define OV9655 6
#define MT9M112 7
#define OV7725 8
#define OV7660 9
#define MT9M001 10
#define OV5640 11
#define MT9D111_B 12
#define OV9650 13
#define MT9V111 14
#define MT9T112 15
#define MT9D112 16
#define OV2640_160x120 0 //160x120
#define OV2640_176x144 1 //176x144
#define OV2640_320x240 2 //320x240
#define OV2640_352x288 3 //352x288
#define OV2640_640x480 4 //640x480
#define OV2640_800x600 5 //800x600
#define OV2640_1024x768 6 //1024x768
#define OV2640_1280x1024 7 //1280x1024
#define OV2640_1600x1200 8 //1600x1200
#define OV3640_176x144 0 //176x144
#define OV3640_320x240 1 //320x240
#define OV3640_352x288 2 //352x288
#define OV3640_640x480 3 //640x480
#define OV3640_800x600 4 //800x600
#define OV3640_1024x768 5 //1024x768
#define OV3640_1280x960 6 //1280x1024
#define OV3640_1600x1200 7 //1600x1200
#define OV3640_2048x1536 8 //2048x1536
#define OV5642_320x240 0 //320x240
#define OV5642_640x480 1 //640x480
#define OV5642_1024x768 2 //1024x768
#define OV5642_1280x960 3 //1280x960
#define OV5642_1600x1200 4 //1600x1200
#define OV5642_2048x1536 5 //2048x1536
#define OV5642_2592x1944 6 //2592x1944
#define OV5642_1920x1080 7 //1920x1080
#define OV5640_320x240 0 //320x240
#define OV5640_352x288 1 //352x288
#define OV5640_640x480 2 //640x480
#define OV5640_800x480 3 //800x480
#define OV5640_1024x768 4 //1024x768
#define OV5640_1280x960 5 //1280x960
#define OV5640_1600x1200 6 //1600x1200
#define OV5640_2048x1536 7 //2048x1536
#define OV5640_2592x1944 8 //2592x1944
//Light Mode
#define Auto 0
#define Sunny 1
#define Cloudy 2
#define Office 3
#define Home 4
//Color Saturation
#define Saturation4 0
#define Saturation3 1
#define Saturation2 2
#define Saturation1 3
#define Saturation0 4
//Brightness
#define Brightbess4 0
#define Brightbess3 1
#define Brightbess2 2
#define Brightbess1 3
#define Brightbess0 4
//Contrast
#define Contrast4 0
#define Contrast3 1
#define Contrast2 2
#define Contrast1 3
#define Contrast0 4
//Special effects
#define Antique 0
#define Bluish 1
#define Greenish 2
#define Reddish 3
#define BW 4
#define Negative 5
#define BWnegative 6
#define Normal 7
/****************************************************/
/* I2C Control Definition */
/****************************************************/
#define I2C_ADDR_8BIT 0
#define I2C_ADDR_16BIT 1
#define I2C_REG_8BIT 0
#define I2C_REG_16BIT 1
#define I2C_DAT_8BIT 0
#define I2C_DAT_16BIT 1
/* Register initialization tables for SENSORs */
/* Terminating list entry for reg */
#define SENSOR_REG_TERM_8BIT 0xFF
#define SENSOR_REG_TERM_16BIT 0xFFFF
/* Terminating list entry for val */
#define SENSOR_VAL_TERM_8BIT 0xFF
#define SENSOR_VAL_TERM_16BIT 0xFFFF
//Define maximum frame buffer size
#if (defined OV2640_MINI_2MP)
#define MAX_FIFO_SIZE 0x5FFFF //384KByte
#elif (defined OV5642_MINI_5MP || defined OV5642_MINI_5MP_BIT_ROTATION_FIXED || defined ARDUCAM_SHIELD_REVC )//||defined OV3640_MINI_3MP)
#define MAX_FIFO_SIZE 0x7FFFF //512KByte
#else
#define MAX_FIFO_SIZE 0x7FFFFF //8MByte
#endif
/****************************************************/
/* ArduChip registers definition */
/****************************************************/
#define RWBIT 0x80 //READ AND WRITE BIT IS BIT[7]
#define ARDUCHIP_TEST1 0x00 //TEST register
#if !(defined OV2640_MINI_2MP)
#define ARDUCHIP_FRAMES 0x01 //FRAME control register, Bit[2:0] = Number of frames to be captured //On 5MP_Plus platforms bit[2:0] = 7 means continuous capture until frame buffer is full
#endif
#define ARDUCHIP_MODE 0x02 //Mode register
#define MCU2LCD_MODE 0x00
#define CAM2LCD_MODE 0x01
#define LCD2MCU_MODE 0x02
#define ARDUCHIP_TIM 0x03 //Timming control
#if !(defined OV2640_MINI_2MP)
#define HREF_LEVEL_MASK 0x01 //0 = High active , 1 = Low active
#define VSYNC_LEVEL_MASK 0x02 //0 = High active , 1 = Low active
#define LCD_BKEN_MASK 0x04 //0 = Enable, 1 = Disable
#if (defined ARDUCAM_SHIELD_V2)
#define PCLK_REVERSE_MASK 0x08 //0 = Normal PCLK, 1 = REVERSED PCLK
#else
#define PCLK_DELAY_MASK 0x08 //0 = data no delay, 1 = data delayed one PCLK
#endif
//#define MODE_MASK 0x10 //0 = LCD mode, 1 = FIFO mode
#endif
//#define FIFO_PWRDN_MASK 0x20 //0 = Normal operation, 1 = FIFO power down
//#define LOW_POWER_MODE 0x40 //0 = Normal mode, 1 = Low power mode
#define ARDUCHIP_FIFO 0x04 //FIFO and I2C control
#define FIFO_CLEAR_MASK 0x01
#define FIFO_START_MASK 0x02
#define FIFO_RDPTR_RST_MASK 0x10
#define FIFO_WRPTR_RST_MASK 0x20
#define ARDUCHIP_GPIO 0x06 //GPIO Write Register
#if !(defined (ARDUCAM_SHIELD_V2) || defined (ARDUCAM_SHIELD_REVC))
#define GPIO_RESET_MASK 0x01 //0 = Sensor reset, 1 = Sensor normal operation
#define GPIO_PWDN_MASK 0x02 //0 = Sensor normal operation, 1 = Sensor standby
#define GPIO_PWREN_MASK 0x04 //0 = Sensor LDO disable, 1 = sensor LDO enable
#endif
#define BURST_FIFO_READ 0x3C //Burst FIFO read operation
#define SINGLE_FIFO_READ 0x3D //Single FIFO read operation
#define ARDUCHIP_REV 0x40 //ArduCHIP revision
#define VER_LOW_MASK 0x3F
#define VER_HIGH_MASK 0xC0
#define ARDUCHIP_TRIG 0x41 //Trigger source
#define VSYNC_MASK 0x01
#define SHUTTER_MASK 0x02
#define CAP_DONE_MASK 0x08
#define FIFO_SIZE1 0x42 //Camera write FIFO size[7:0] for burst to read
#define FIFO_SIZE2 0x43 //Camera write FIFO size[15:8]
#define FIFO_SIZE3 0x44 //Camera write FIFO size[18:16]
/****************************************************/
/****************************************************************/
/* define a structure for sensor register initialization values */
/****************************************************************/
struct sensor_reg {
uint16_t reg;
uint16_t val;
};
/****************************************************************/
/* define a structure for sensor register initialization values */
/****************************************************************/
class ArduCAM
{
public:
ArduCAM( void );
ArduCAM(byte model ,int CS);
void InitCAM( void );
void CS_HIGH(void);
void CS_LOW(void);
void flush_fifo(void);
void start_capture(void);
void clear_fifo_flag(void);
uint8_t read_fifo(void);
uint8_t read_reg(uint8_t addr);
void write_reg(uint8_t addr, uint8_t data);
uint32_t read_fifo_length(void);
void set_fifo_burst(void);
void set_bit(uint8_t addr, uint8_t bit);
void clear_bit(uint8_t addr, uint8_t bit);
uint8_t get_bit(uint8_t addr, uint8_t bit);
void set_mode(uint8_t mode);
uint8_t bus_write(int address, int value);
uint8_t bus_read(int address);
// Write 8 bit values to 8 bit register address
int wrSensorRegs8_8(const struct sensor_reg*);
// Write 16 bit values to 8 bit register address
int wrSensorRegs8_16(const struct sensor_reg*);
// Write 8 bit values to 16 bit register address
int wrSensorRegs16_8(const struct sensor_reg*);
// Write 16 bit values to 16 bit register address
int wrSensorRegs16_16(const struct sensor_reg*);
// Read/write 8 bit value to/from 8 bit register address
byte wrSensorReg8_8(int regID, int regDat);
byte rdSensorReg8_8(uint8_t regID, uint8_t* regDat);
// Read/write 16 bit value to/from 8 bit register address
byte wrSensorReg8_16(int regID, int regDat);
byte rdSensorReg8_16(uint8_t regID, uint16_t* regDat);
// Read/write 8 bit value to/from 16 bit register address
byte wrSensorReg16_8(int regID, int regDat);
byte rdSensorReg16_8(uint16_t regID, uint8_t* regDat);
// Read/write 16 bit value to/from 16 bit register address
byte wrSensorReg16_16(int regID, int regDat);
byte rdSensorReg16_16(uint16_t regID, uint16_t* regDat);
void OV2640_set_JPEG_size(uint8_t size);
void OV3640_set_JPEG_size(uint8_t size);
void OV5642_set_JPEG_size(uint8_t size);
void OV5640_set_JPEG_size(uint8_t size);
void OV5642_set_RAW_size (uint8_t size);
void set_Light_Mode(uint8_t Light_Mode);
void set_Color_Saturation(uint8_t Color_Saturation);
void set_Brightness(uint8_t Brightness);
void set_Contrast(uint8_t Contrast);
void set_Special_effects(uint8_t Special_effect);
void set_format(byte fmt);
#if defined (RASPBERRY_PI)
uint8_t transfer(uint8_t data);
void transfers(uint8_t *buf, uint32_t size);
#endif
void transferBytes_(uint8_t * out, uint8_t * in, uint8_t size);
void transferBytes(uint8_t * out, uint8_t * in, uint32_t size);
inline void setDataBits(uint16_t bits);
protected:
regtype *P_CS;
regsize B_CS;
byte m_fmt;
byte sensor_model;
byte sensor_addr;
};
#if defined OV7660_CAM
#include "ov7660_regs.h"
#endif
#if defined OV7725_CAM
#include "ov7725_regs.h"
#endif
#if defined OV7670_CAM
#include "ov7670_regs.h"
#endif
#if defined OV7675_CAM
#include "ov7675_regs.h"
#endif
#if ( defined(OV5642_CAM) || defined(OV5642_MINI_5MP) || defined(OV5642_MINI_5MP_BIT_ROTATION_FIXED) || defined(OV5642_MINI_5MP_PLUS) )
#include "ov5642_regs.h"
#endif
#if (defined(OV3640_CAM) || defined(OV3640_MINI_3MP))
#include "ov3640_regs.h"
#endif
#if (defined(OV2640_CAM) || defined(OV2640_MINI_2MP))
#include "ov2640_regs.h"
#endif
#if (defined (MT9D111A_CAM) || defined (MT9D111B_CAM))
#include "mt9d111_regs.h"
#endif
#if defined MT9M112_CAM
#include "mt9m112_regs.h"
#endif
#if defined MT9V111_CAM
#include "mt9v111_regs.h"
#endif
#if ( defined(OV5640_CAM) || defined(OV5640_MINI_5MP_PLUS) )
#include "ov5640_regs.h"
#endif
#if defined MT9M001_CAM
#include "mt9m001_regs.h"
#endif
#if defined MT9T112_CAM
#include "mt9t112_regs.h"
#endif
#if defined MT9D112_CAM
#include "mt9d112_regs.h"
#endif
#endif
#ifndef _MEMORYSAVER_
#define _MEMORYSAVER_
//Only when using raspberry,enable it
//#define RASPBERRY_PI
//There are two steps you need to modify in this file before normal compilation
//Only ArduCAM Shield series platform need to select camera module, ArduCAM-Mini series platform doesn't
//Step 1: select the hardware platform, only one at a time
//#define OV2640_MINI_2MP
//#define OV5642_MINI_5MP
//#define OV5642_MINI_5MP_BIT_ROTATION_FIXED
#define OV5642_MINI_5MP_PLUS
//#define OV5640_MINI_5MP_PLUS
//#define ARDUCAM_SHIELD_REVC
//#define ARDUCAM_SHIELD_V2
//Step 2: Select one of the camera module, only one at a time
#if (defined(ARDUCAM_SHIELD_REVC) || defined(ARDUCAM_SHIELD_V2))
//#define OV7660_CAM
//#define OV7725_CAM
//#define OV7670_CAM
//#define OV7675_CAM
//#define OV2640_CAM
//#define OV3640_CAM
#define OV5642_CAM
//#define OV5640_CAM
//#define MT9D111A_CAM
//#define MT9D111B_CAM
//#define MT9M112_CAM
//#define MT9V111_CAM
//#define MT9M001_CAM
//#define MT9T112_CAM
//#define MT9D112_CAM
#endif
#endif //_MEMORYSAVER_
ArduCam / Particle Firmware and Server Repository











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments