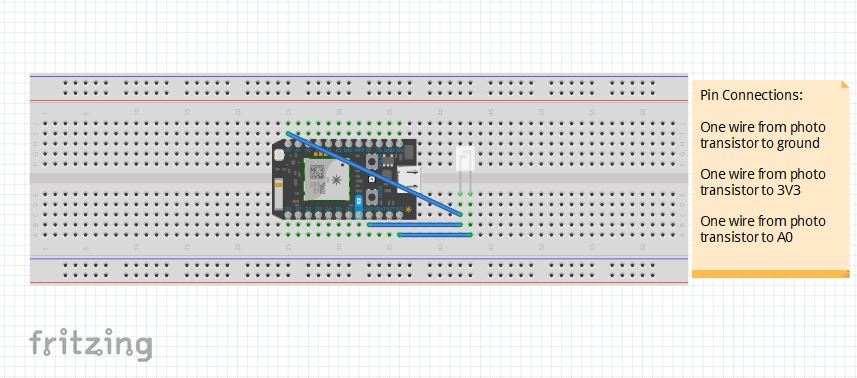
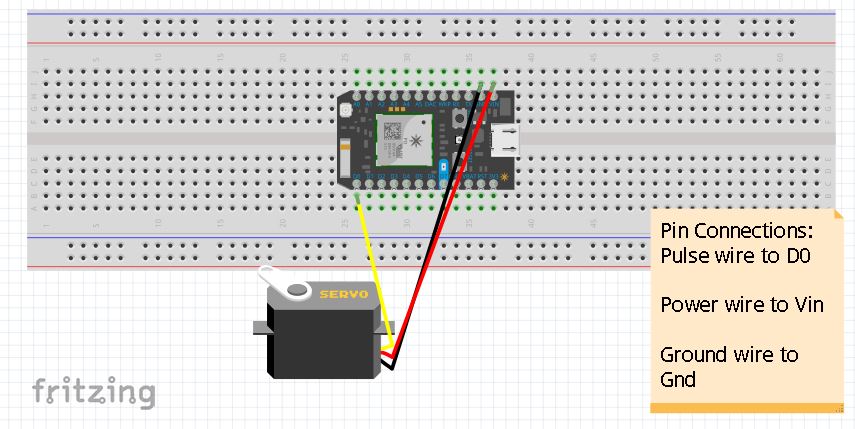
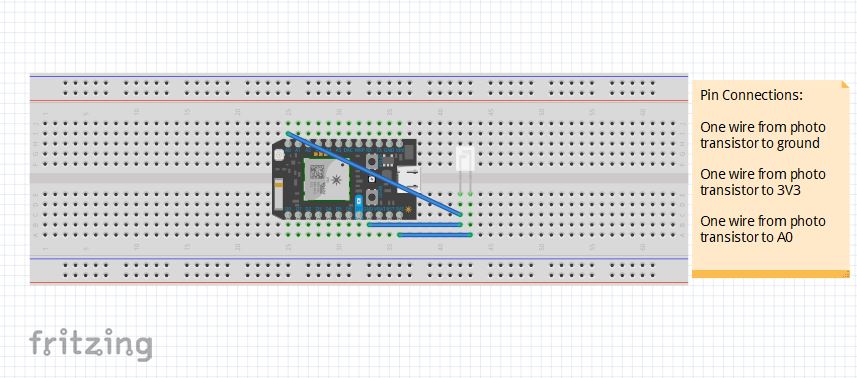
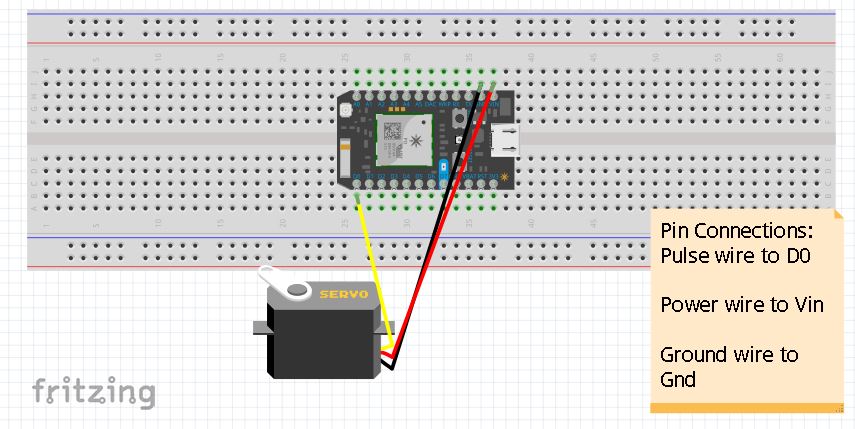
Using two particle photons we were able control a linear servo motor which we rigged to a light switch to turn it on or off, but it can be used for any switch with one photon that controls the motion of the motor, and (through IFTTT) can also be activated from a smart device. The other photon uses a phototransistor to detect light and can automatically send the motor into its "off" mode after a certain amount of time after room light is detected. Sample code was used from Particle's website for each photon and some lines of code were changed.
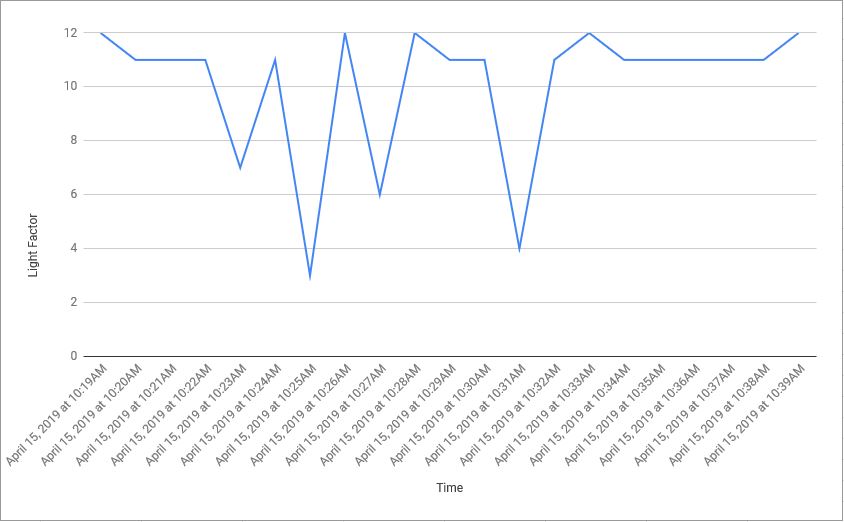
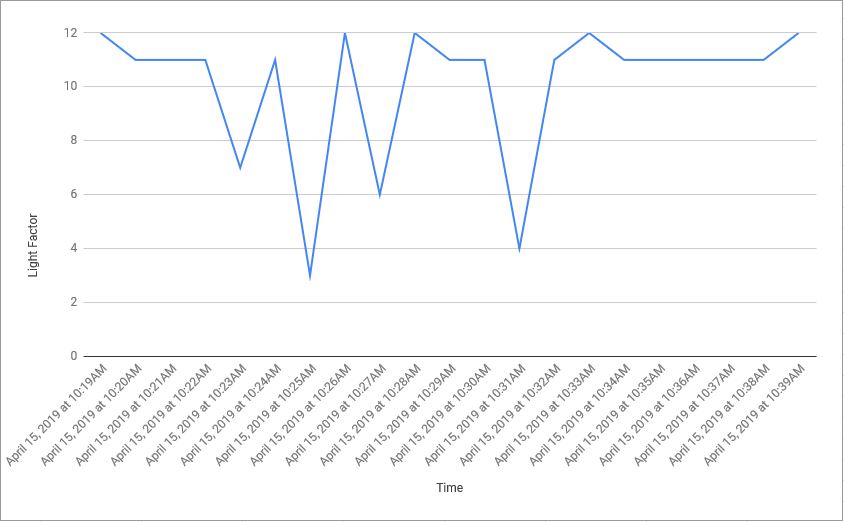
Link to live data: https://docs.google.com/spreadsheets/d/1rPht9NUCwO9QnyJSKDd_x94GcFIkFhB2onXb0jULqko/edit?usp=sharing
Photo of Circuit in Action
For this project the servo motor will need to be attached to the wall below the switch using a 3M Command strip. Attach it so when the servo is in the off position the top of the motor is touching the bottom of the switch, as shown below.
Servo Attachment to the wall
The position of the servo motor on the wall may need to be adjusted so that the switch can be fully operated by the motor. Metal wire will be used to hook the servo motor to the switch you choose by inserting the wire through the hole at the top of the servo motor and wrapping it around to create a loop and back through the same hole multiple times (this is done to decrease the risk of the wire bending). When finished, you should have created a hook about one inch in diameter.













{kind=link}
{kind=link}
{kind=link}
Comments