BackgroundFor this project, our group sought to make a sensor that could find distances and set off a buzzer and LED when that distance became closer than a set value. This project could be used when you are parking and get too close to a car or a wall. This project has many other uses though such as an alarm for when a door is opened or when something steps onto your porch. This can all be done by just adjusting the set distance to your needs.
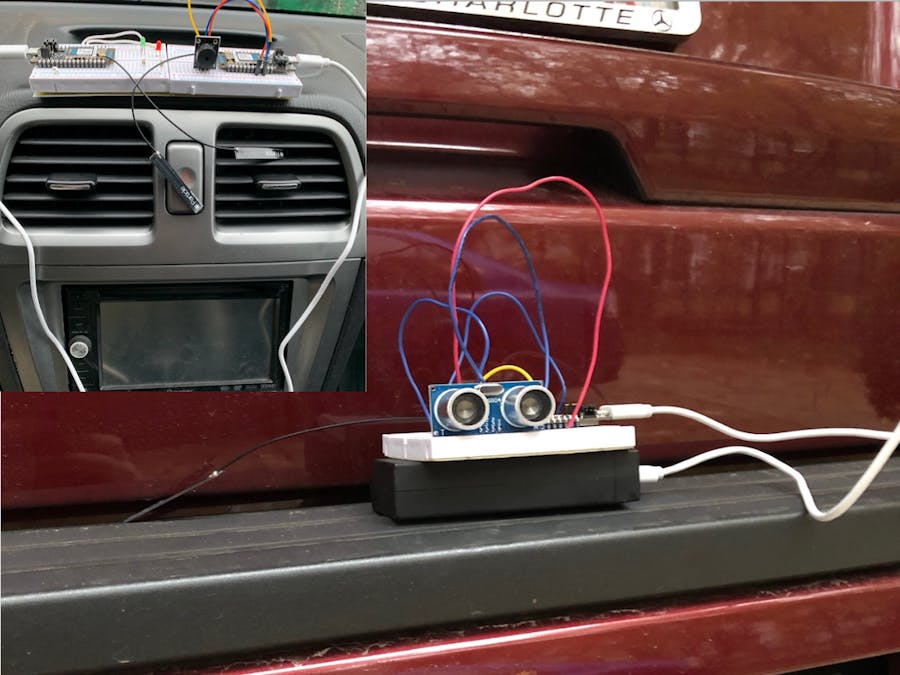
How it WorksThis project uses 3 Particle Argon boards meshed together. One board contains the Ultrasonic Sensor, which communicates with both the LED board and the Buzzer board. The LED and Buzzer do not communicate with one another. When the ultrasonic sensor detects an object within the critical distance, it sends a "breach" message to both the buzzer and the LED. The Argon boards connected to the LED and buzzer will pick up the breach message and turn on their respective components. When the sensor is mounted to the rear of a vehicle, the driver can use this to sense if they are close to an object when backing up.
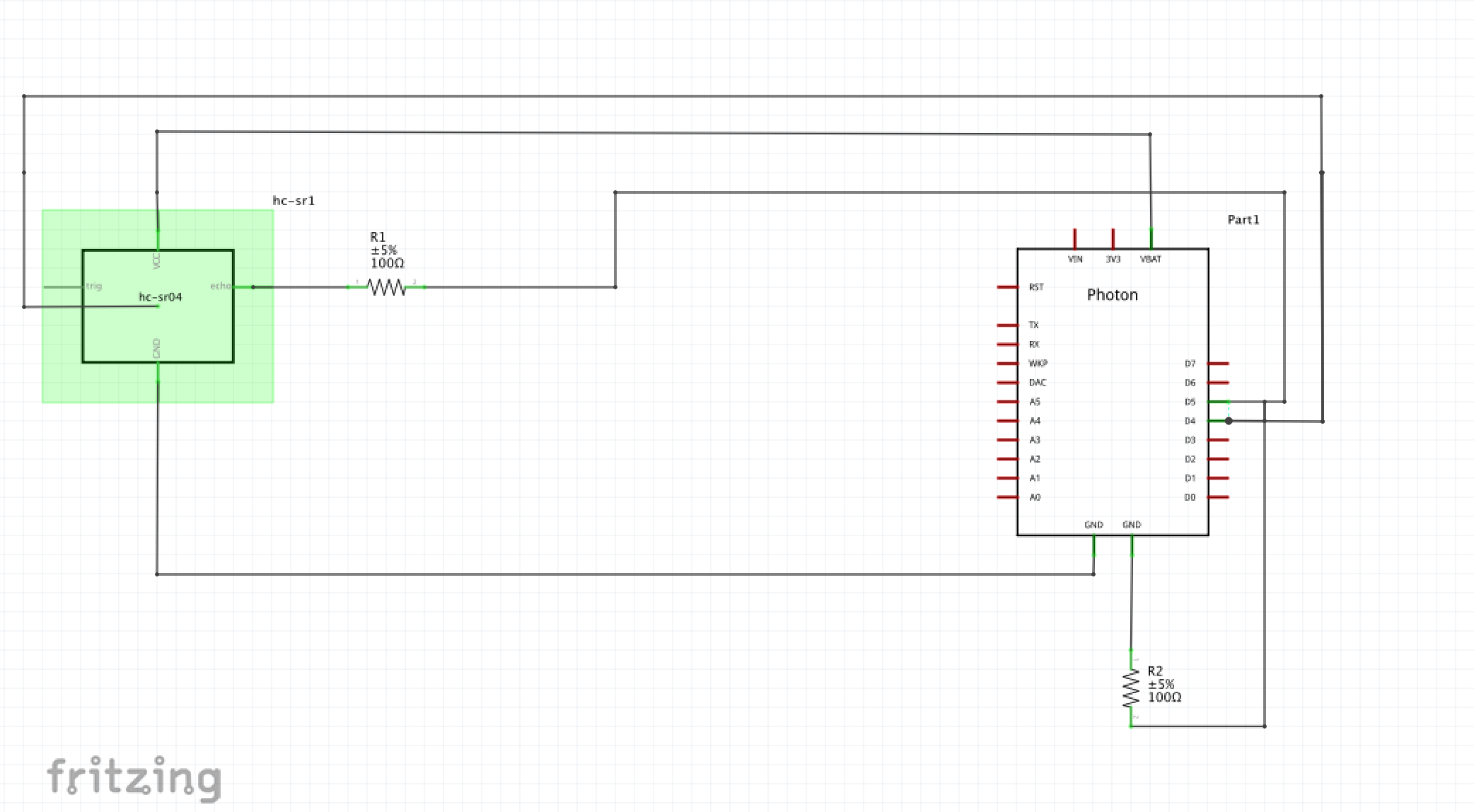
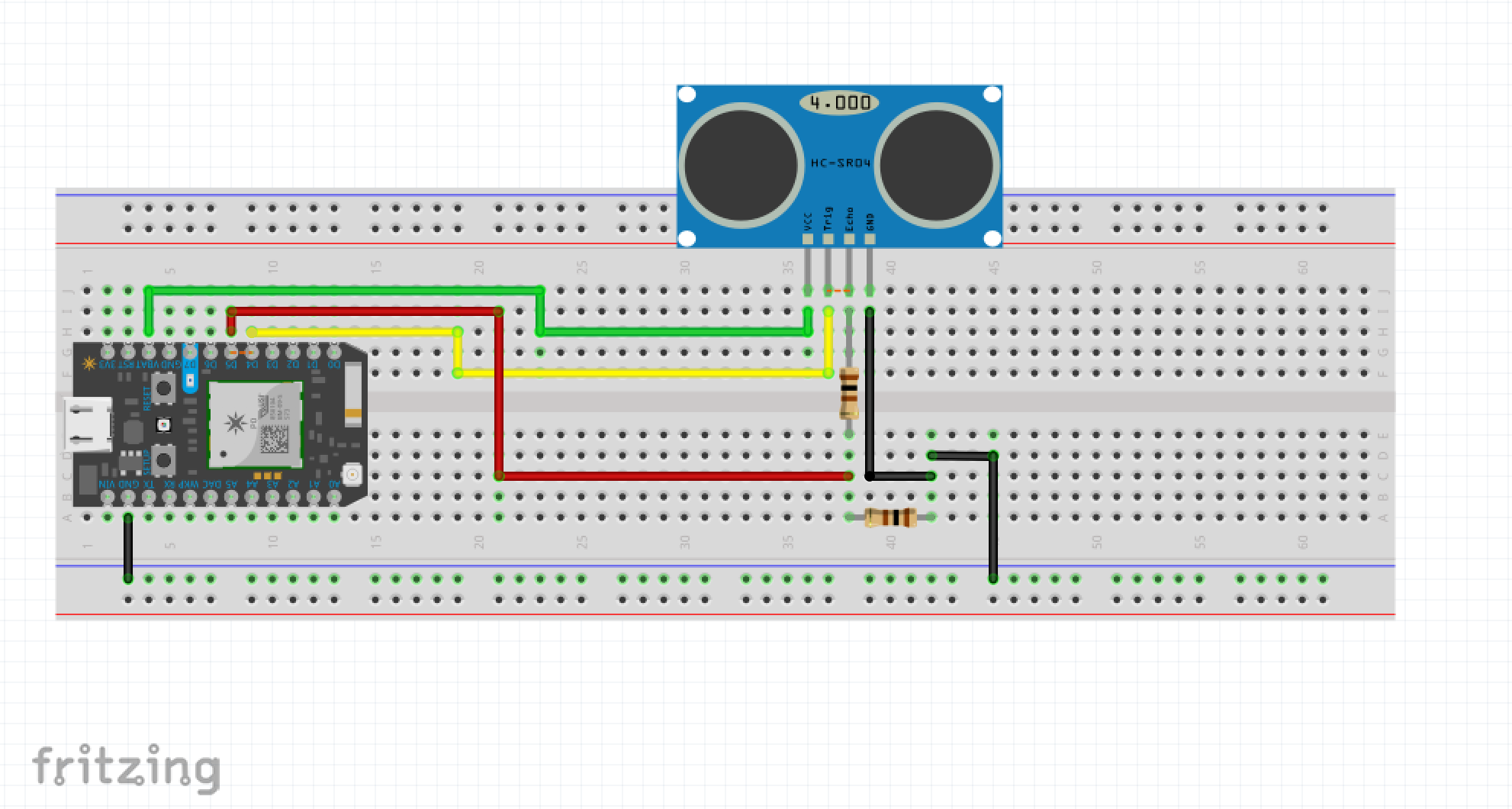
Ultrasonic Sensor Board
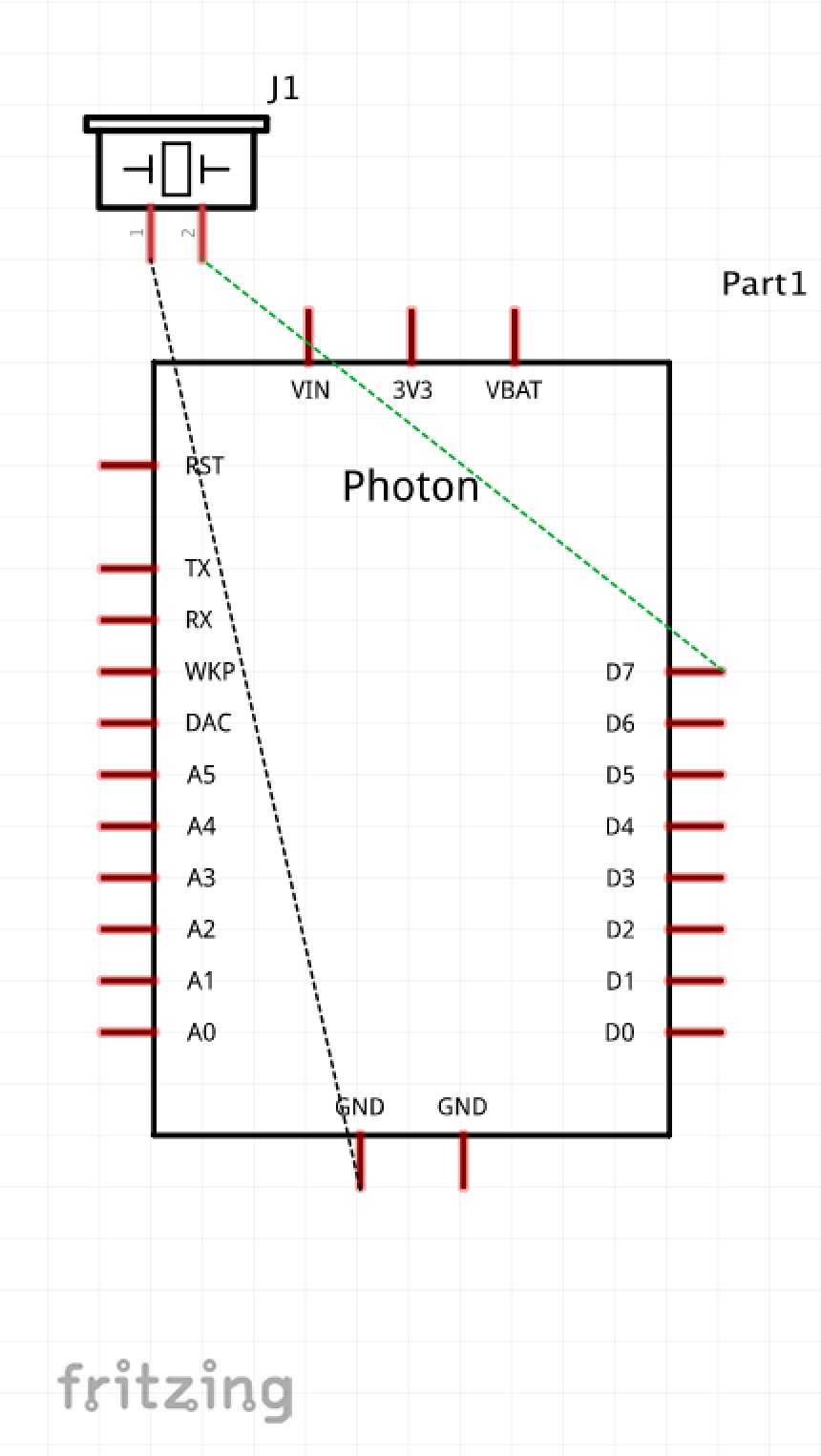
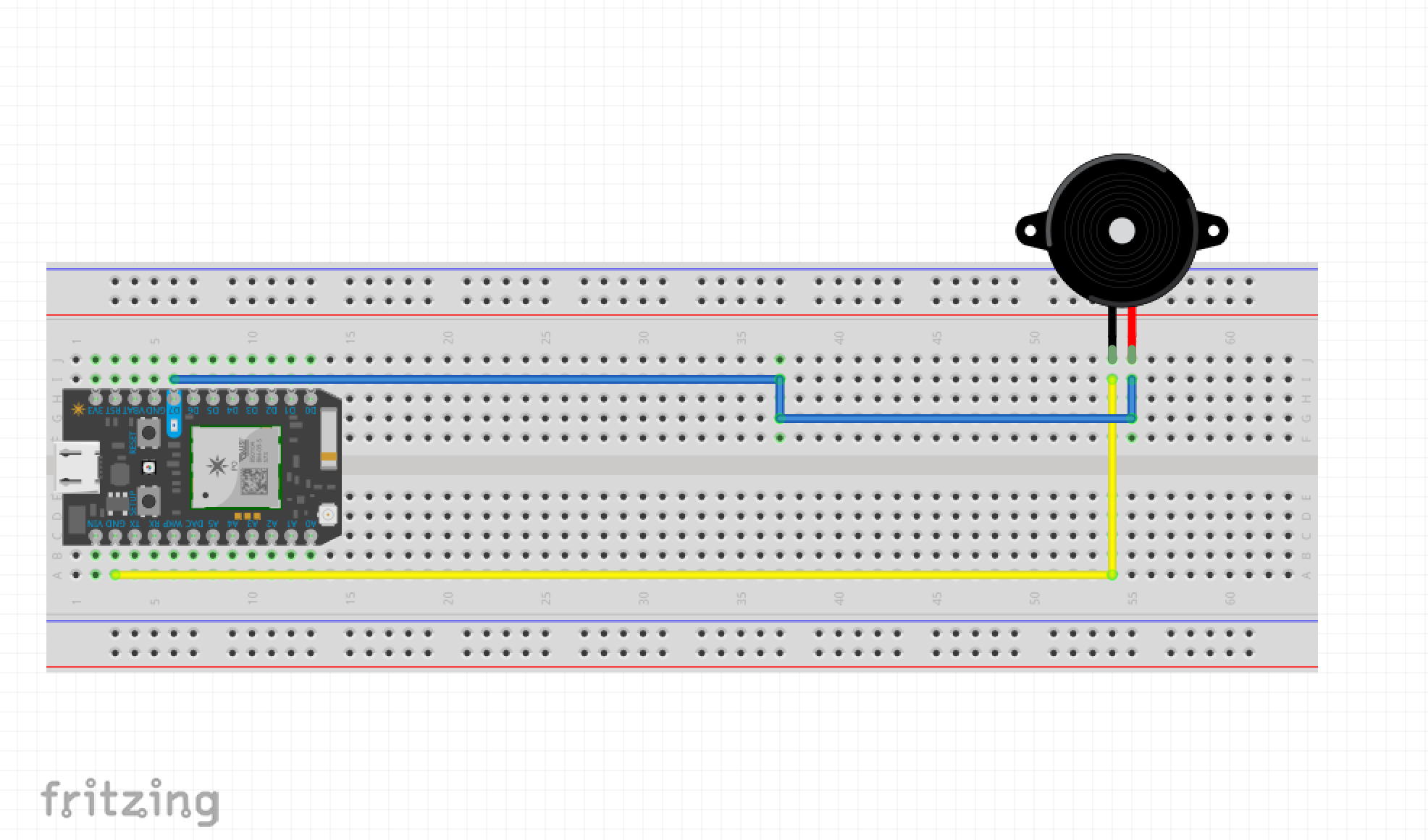
Buzzer
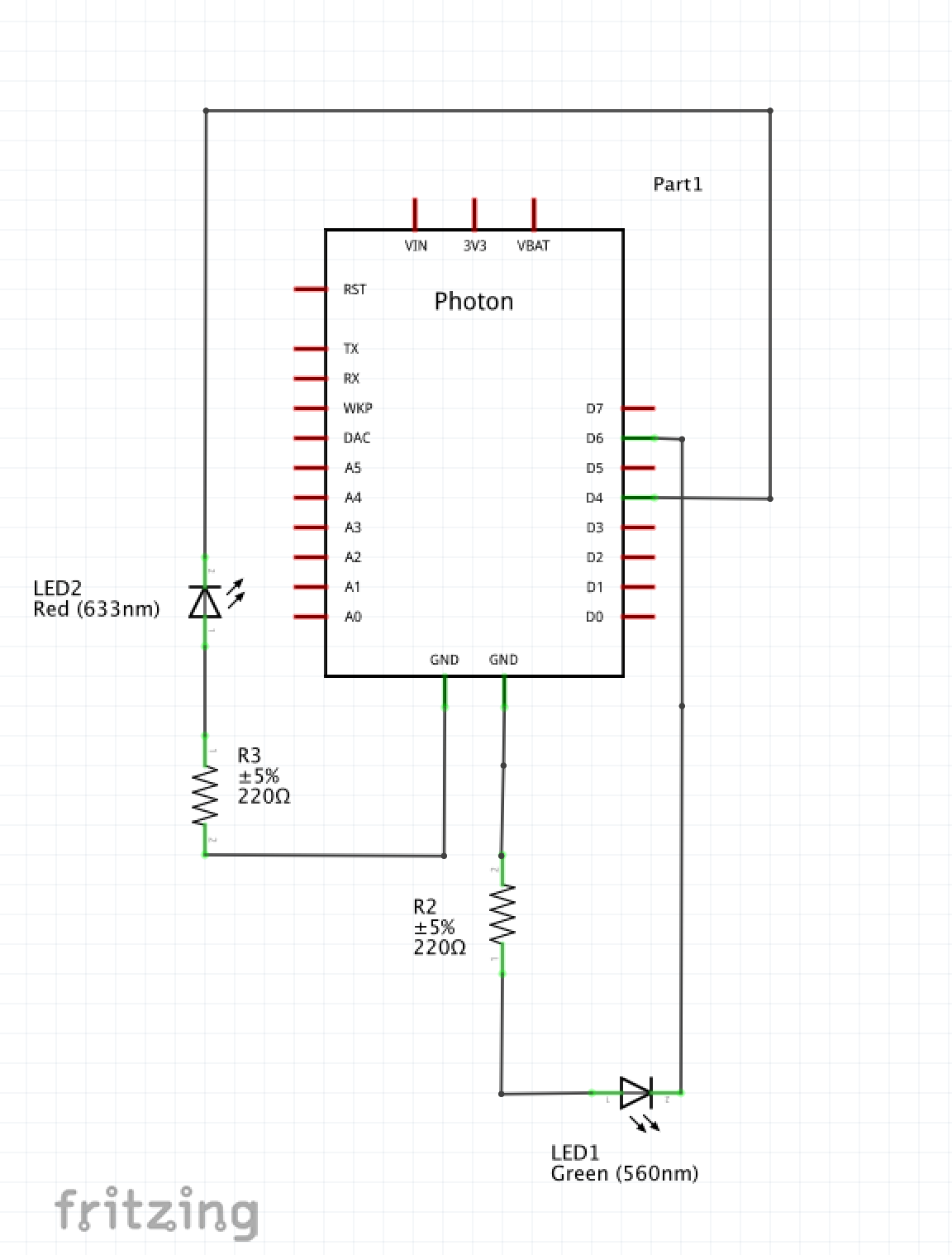
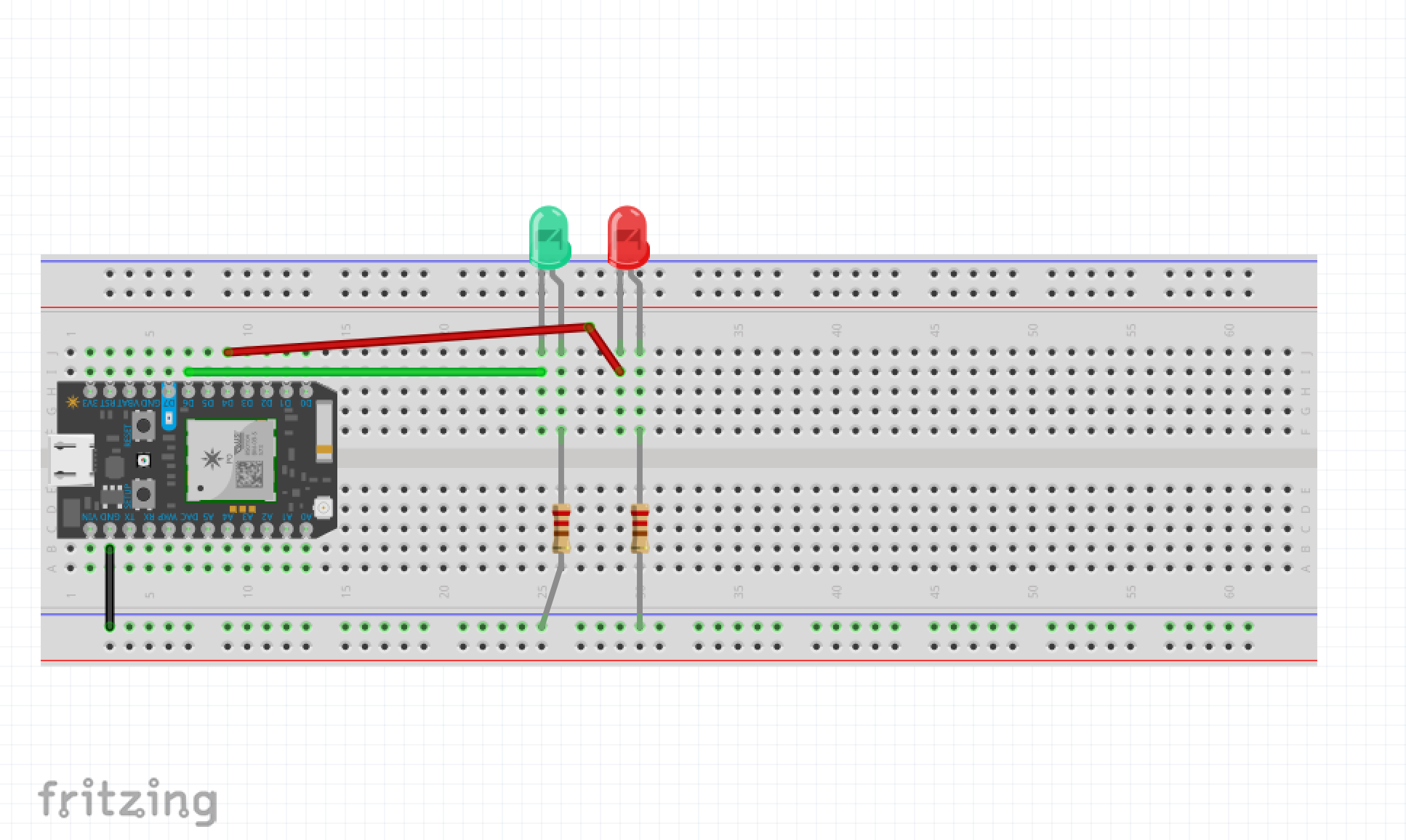
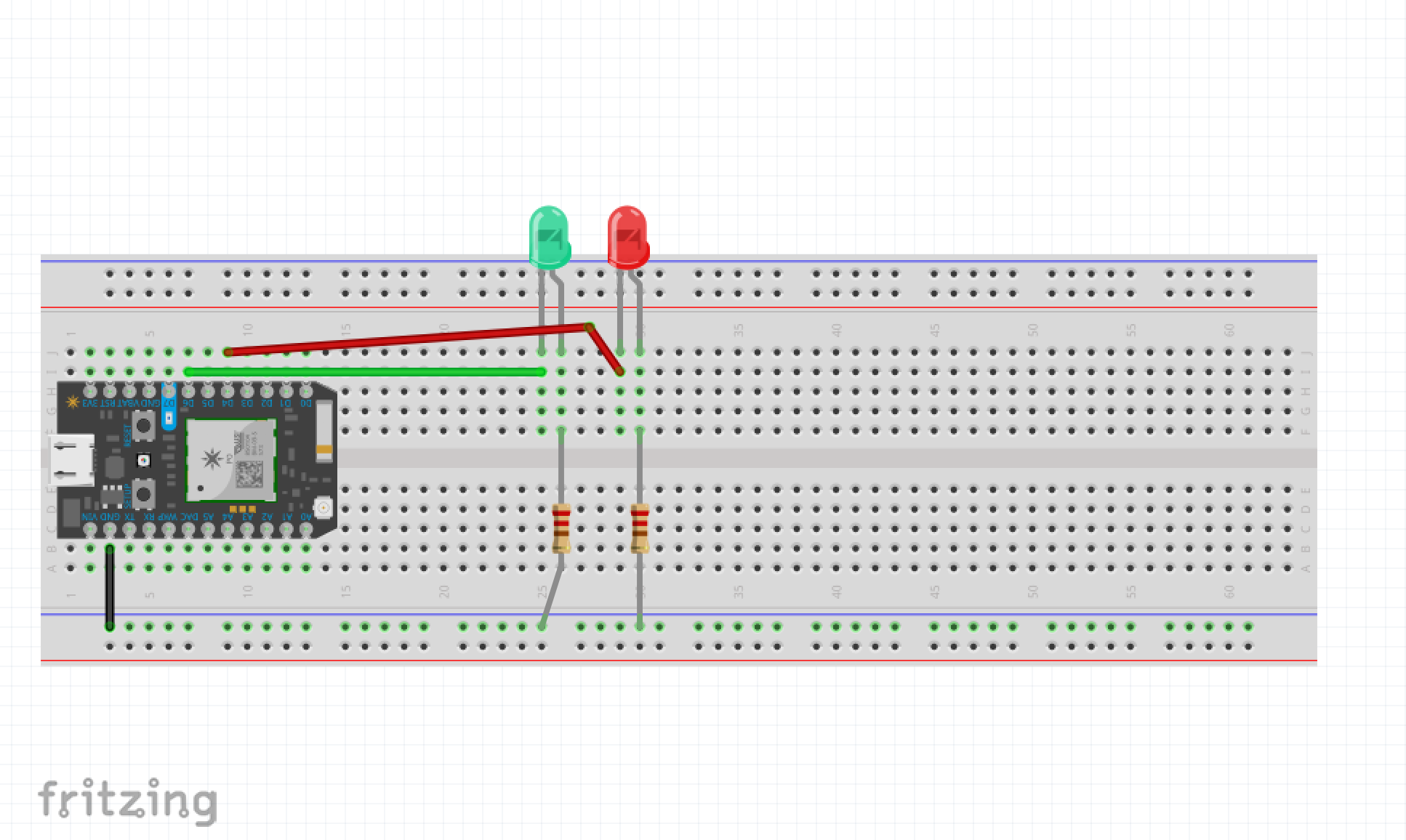
LED's
Buzzer and LED together
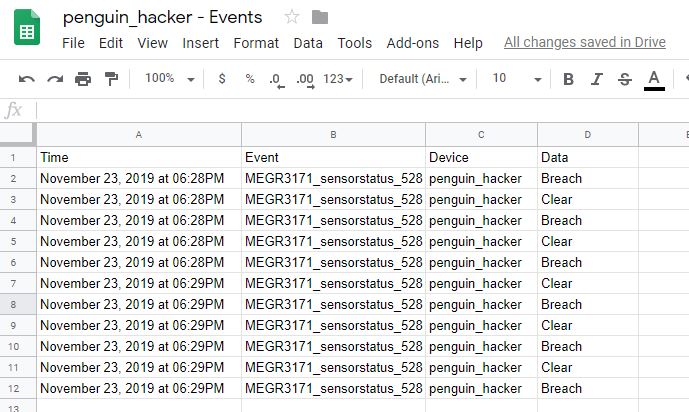
Ultrasonic Sensor Events
YoutubeVideo








_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments