

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 8 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 5 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
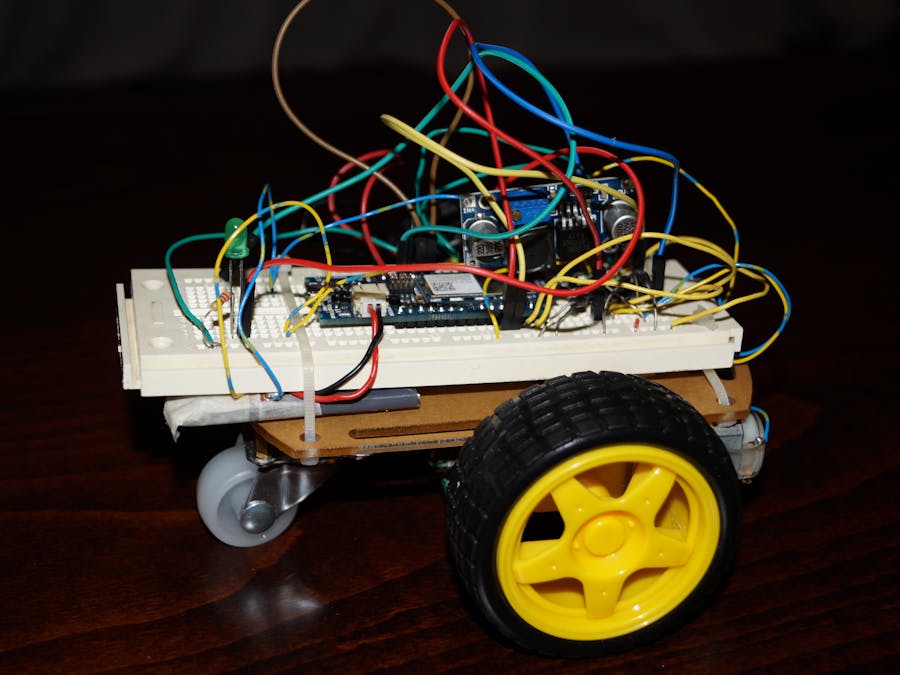
What will you Build in this Project?
This is a project that will show you step by step how to create a Wi-Fi controlled RC Car that will automatically recharge wirelessly while it is parked.
How it works?
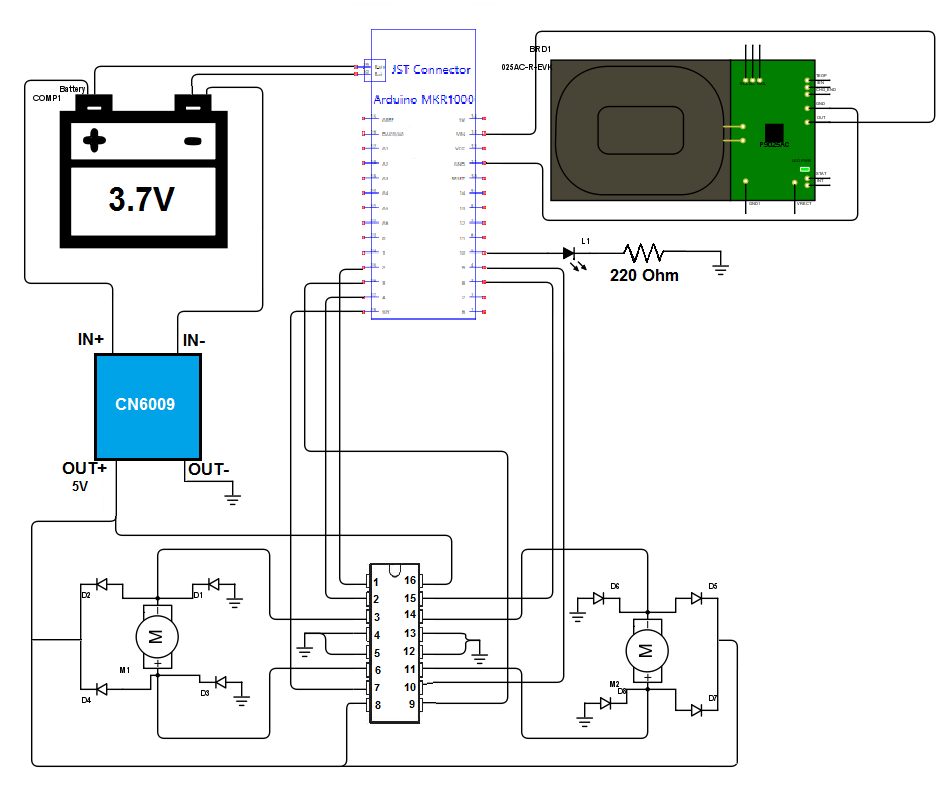
The brain of the project is the Arduino MKR1000 and it is connected through Wi-Fi with your mobile device. The Arduino board is powered by a 3.7V Li-Po battery. For the motor control an L293DNE motor driver is used. However it needs at least 4.5V to operate. We will step up voltage from 3.7V to 5V with a Step-up boost Power Converter Module (converts low voltage to higher) and in this way the motor driver will be powered with 5V.
For charging the battery, the Arduino MKR1000 board features an automatic charging system for Li-Po batteries. When an external source (5V DC) of power is connected, the battery that is connected to the board is being charged. So the IDT P9025AC-R-EVK – Qi 5W Receiver will be connected to the Arduino board as an external source (5V DC). When the car parks over the charging station (which is the IDT P9038-R-EVK – Qi 5W Transmitter), the battery will charge.
The control system features two speed modes: Fast and Slow.
How to build it?
Hardware PartSolder wires on the motor poles and on the IDT Receiver board (Pin OUT with red wire and pin GND with black wire). For this step you will need a soldering iron and 6 wires.
Making the electronic circuit. You can use a breadboard to create your circuit or else you can solder all the connections.
CAUTION: Use a 3.7V Li-Po battery with at least 700mAh capacity! Otherwise the battery may overheat and explode!
Adjusting the CN6009. Step-up power converter module to 5V. To adjust CN6009's output value use a screwdriver. Be sure to check the output voltage (by connecting a Voltmeter to the pins OUT+ and OUT-).
Connecting the IDT wireless power Qi 5W receiver. Take a piece of plastic (e.g. plastic card) to make a base for the Wireless Power Receiver on the bottom of the car. Then glue the piece of plastic as well as the Receiver to the bottom of the car with silicone. Finally, connect the red wire of the IDT Receiver to the VIN pin of the arduino and the black wire to the GND pin.
Making the Vehicle Stable. Fasten with tie wraps the battery and the breadboard to the vehicle.
For this part just copy the code. In the code file fill in your network SSID and Password (lines 12, 13 in the code file). You need to follow the comment instructions. The code is currently set to work with WPA/WPA2 networks. If you want to connect to a WEP or an open network follow the instructions in the comments of the code (lines 34-37).
How to use it?
Step 1: Connecting to the Arduino MKR1000Controlling the vehicle requires Wi-Fi connection. You can achieve that with two ways. The first one is to enable Wi-Fi Hotspot on your mobile device and connect the board to the Hotspot. The second one is to connect your mobile device and the Arduino board to the same Wi-Fi router. Be sure to fill in your router’s SSID and Password settings in the code file that will be uploaded to the Arduino board.
Note: It is better to use the first method (Wi-Fi Hotspot) because in this way you can control your vehicle without the need of a router.
Step 2: Getting the IP Address of the Arduino MKR1000If the Arduino board is connected to the hotspot of your mobile device, go to Wi-Fi Hotspot settings and there you will see the IP address of your board (e.g. 192.168.1.1).
If the Arduino board is connected to a Wi-Fi router then you need to check that from the router settings.
The LED on the car indicates successful connection to the specified network and server activation.
Step 3: Accessing the Webserver of the Arduino MKR1000Go to your browser and in the URL box type the IP address of your Arduino.
Step 4: Connecting the Charging BaseConnect the IDT P9038-R-EVK – Qi 5W Transmitter to a wall socket using a 5V DC Adapter.
Step 5: Have Fun!Charging Time!!
Test Drive:




{kind=link}
Comments