Para la realización de nuestro proyecto hemos querido diseñar el prototipo de una máquina real, en este caso una grúa elevadora de cargas, similar a las que se pueden encontrar en el sector de la construcción.
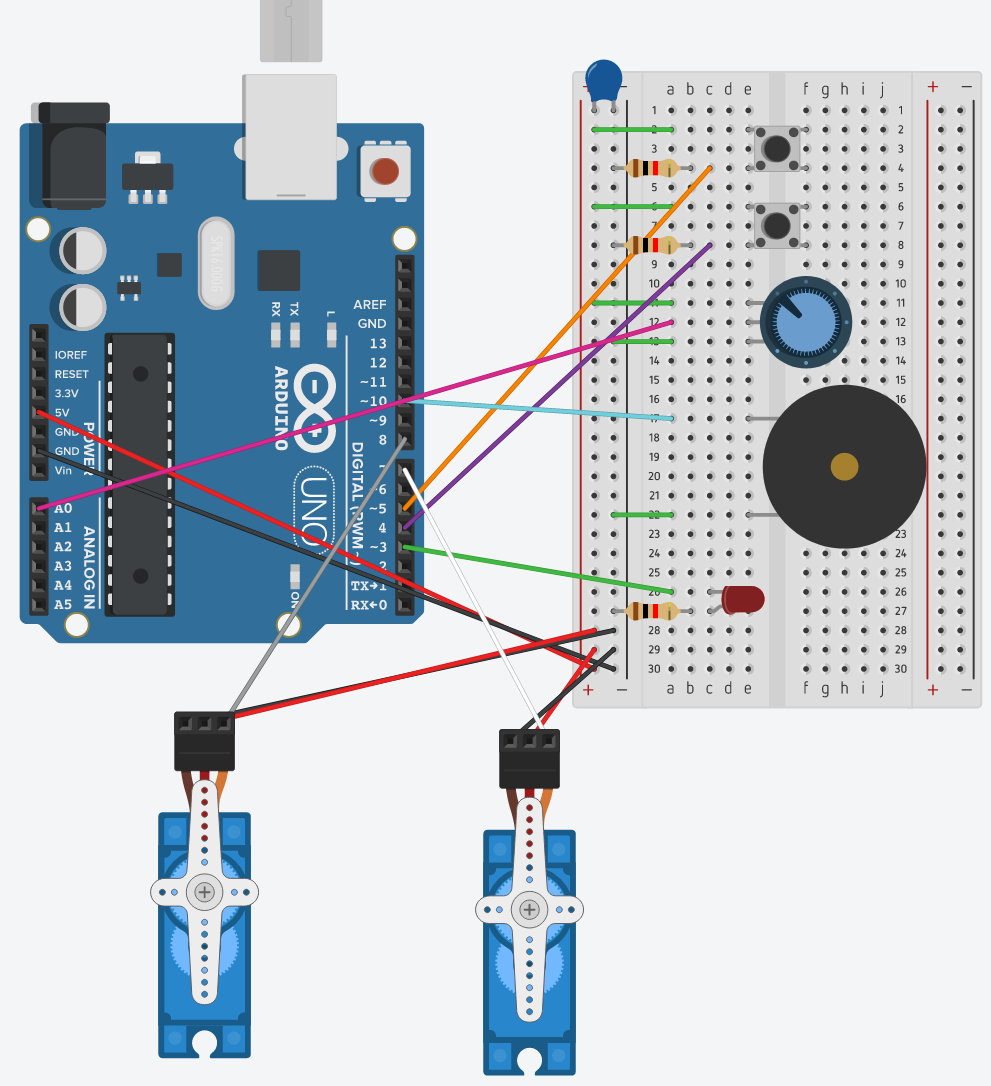
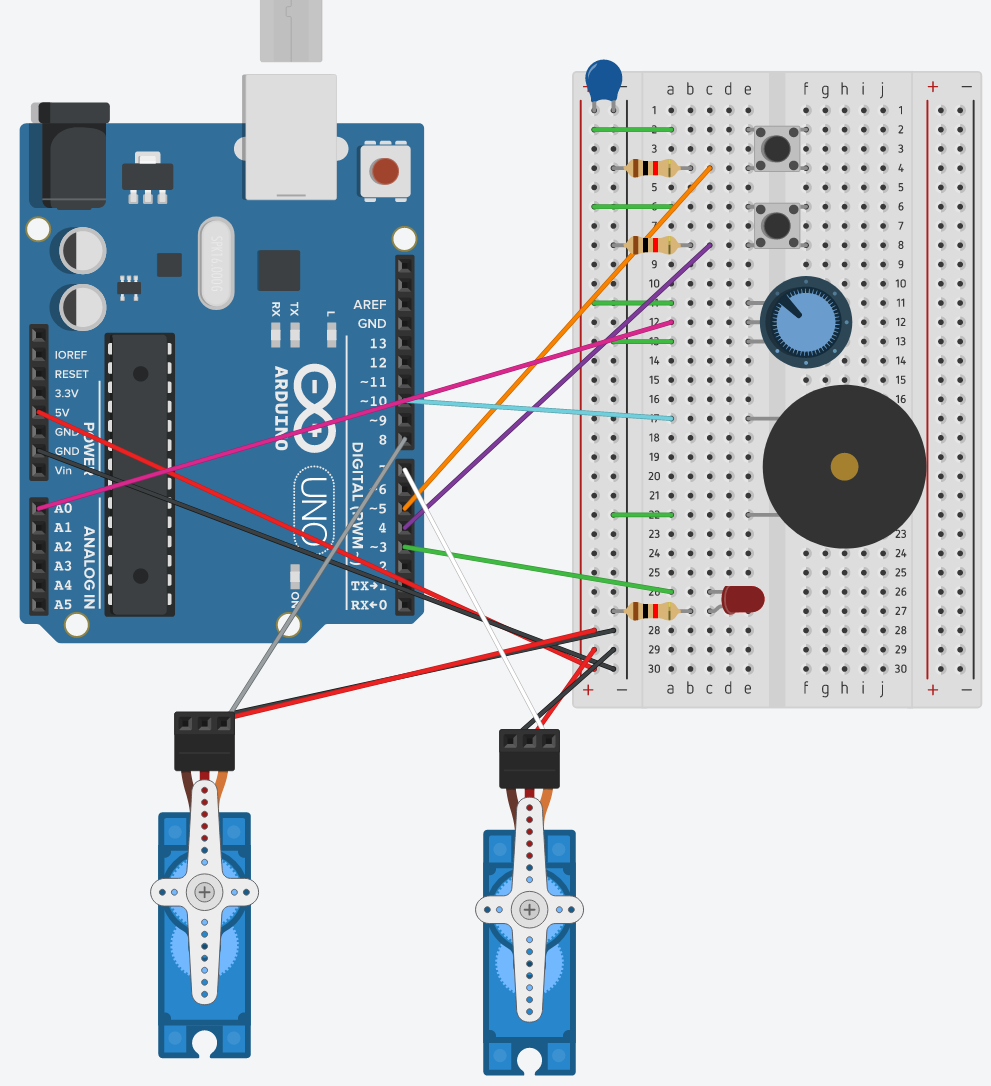
La grúa se controla desde un circuito anexo. Este circuito ha sido diseñado como un "shield" que se conecta directamente sobre la tarjeta Arduino.
En dicho circuito se encuentran los controles de la grúa, que son los siguientes:
- Botón pulsador N/A para la elevación de la carga.
- Botón pulsador N/A para el descenso de la carga.
- Potenciómetro para girar la grúa en sentido circular.
Para mover las cargas la grúa incorpora un servomotor de giro continuo, en cuyo eje se conecta una polea. Una cuerda conectada a la carga y guiada a través de alcayatas enrolla sobre esta polea provocando la subida o bajada de la carga, haciendo girar el motor en un sentido u otro.
Para cambiar la orientación de la grúa se emplea un potenciómetro, de manera que al girar éste, la grua "sigue" el ángulo girado.
Además, se incorporan 2 señales de aviso, una luminosa (LED rojo colocado en la parte superior) y otra acústica, para avisar del movimiento de la carga.
El diseño de la grúa ha sido "evolutivo", es decir, a partir de una grúa con unas funcionalidades básicas se han ido realizando mejoras hasta conseguir el prototipo final.
La primera versión se realizó con materiales de bajo coste, como el poliestireno expandido para el soporte de la grúa, y su funcionalidad se limitaba a subir y bajar la carga. En la imagen siguiente puede verse el diseño ya acabado del primer prototipo (el servomotor de la parte superior no estaba operativo en ese momento, sólo se colocó para realizar pruebas de diseño).
Para la segunda versión se incorporan como mejoras la posibilidad de orientar la grúa utilizando el servomotor descrito anteriormente, manejado por medio de un potenciómetro.
Para la tercera versión se implementan las señales de aviso acústica y luminosa. Además, se cambia el soporte por madera, mucho más resistente, duradero y que dota al proyecto de una mejor apariencia estética.
Una vez que la grúa funciona correctamente de acuerdo a las especificaciones que nos habíamos planteado desde un principio, se decide sustituir el cableado. Para ello, se desarrolla una tarjeta para conectar directamente sobre la placa Arduino utilizando una placa de prototipos pretaladrada.
El resultado final puede verse en la siguiente imagen:
Versión 4.0 (final) de la grúa
En nuestro canal de Tecnología de YouTube del IES Peñamayor de Nava, hemos subido un video en el que se puede ver el funcionamiento de la grúa en una de las pruebas realizadas:
Video demostrativo de una prueba de funcionamiento

























_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}






















Comments