When I first decided to make a DIY electronic instrument, the choice was obvious to me: it had to be the bagpipes. I’ve only just begun practicing with a chanter, so I’m still a beginner — but that made it even more exciting to try building my own version.
And then I thought: if I’m already using M5Stack, why stop at the pipes? Why not add drums and make it a full pipe band, all in one device?
The real turning point was discovering the M5Unit Synth (SAM2695). I instantly loved the idea that this tiny module could turn almost anything into a musical instrument. That became the heart of this project.
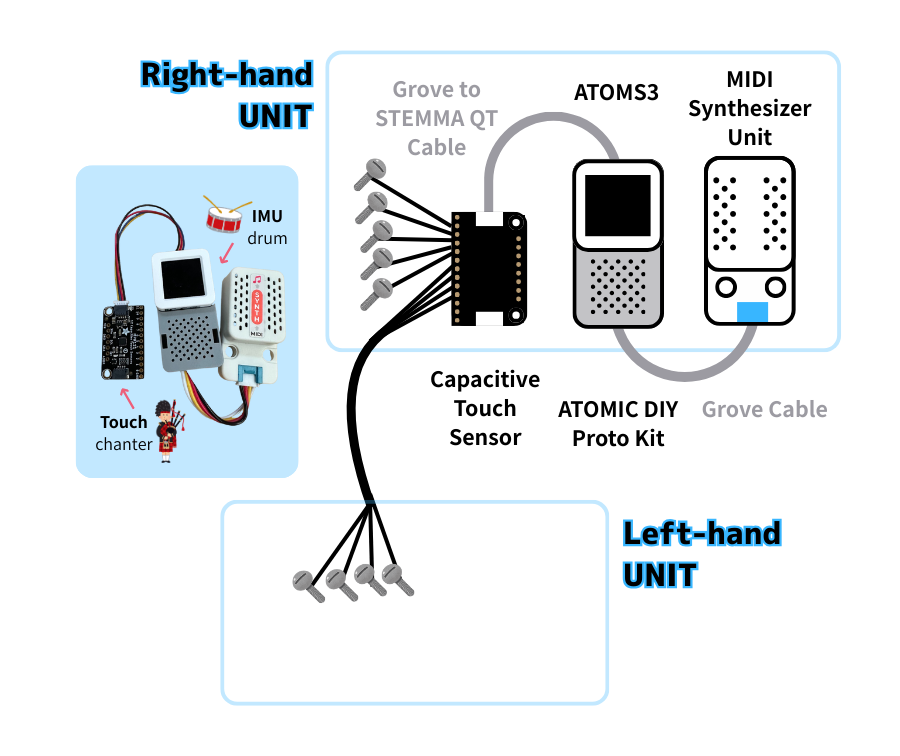
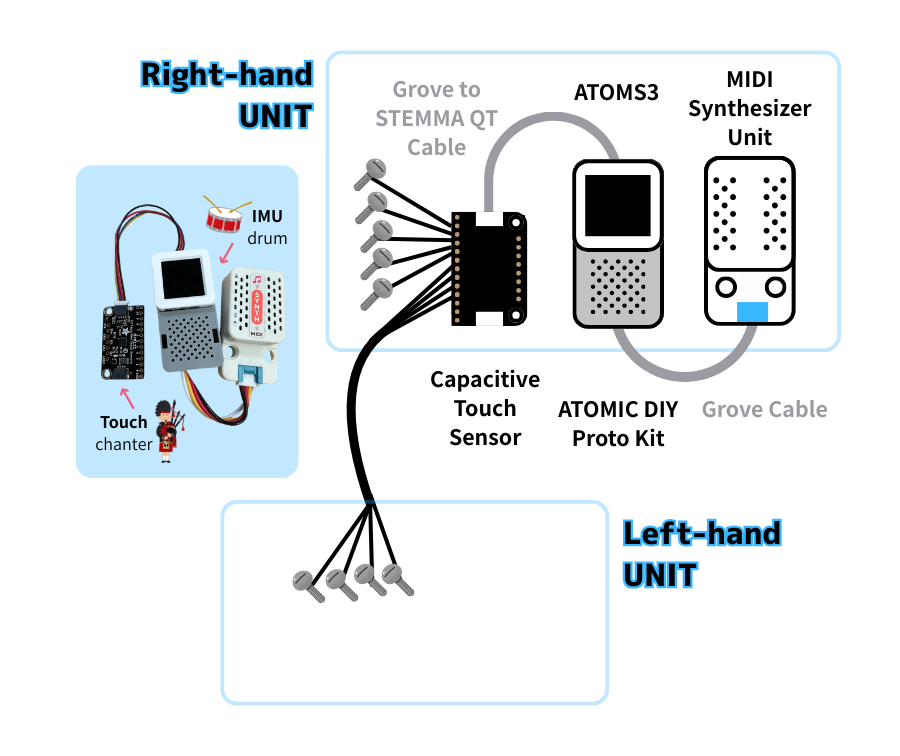
So here it is: M5Stack de MIDI Pipe Band for Fun. Touch sensors play the chanter, IMU gestures trigger snare rolls, and the Synth Unit brings the sound to life. It’s not about building a professional instrument — it’s about exploring, experimenting, and having fun with music and electronics.
Here’s a quick demo performance of *Amazing Grace* on this setup:
Amazing Grace – very first trial, shared as a demo for the contest
Who knows? Maybe one day this project will march with others at a Maker Faire, as a true DIY pipe band.










{kind=link}
Comments