









Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 10 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
For most people living in hostels or dormitories, locking the front door when going out for a few minutes can be a hassle, especially if you keep forgetting your keys in the room every time you leave. Never again will this be a problem, when the only key that you'll ever need will be at your fingertips.
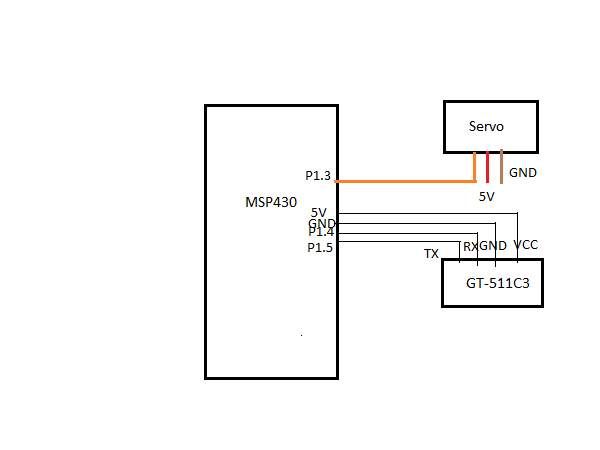
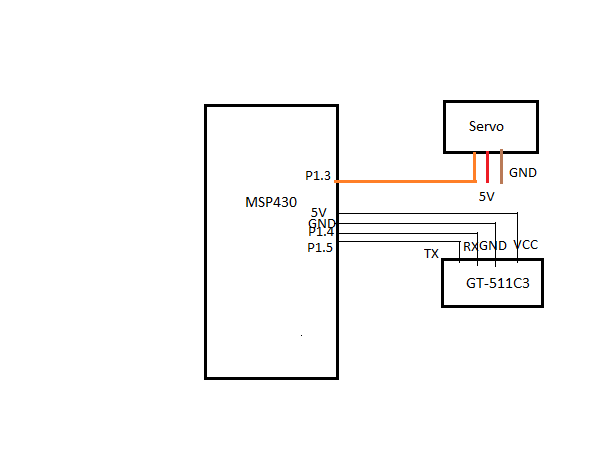
AbstractThe design of the system is fairly simple.
• Person places their finger on the fingerprint sensor
• If the fingerprint happens to match one of the fingerprints stored in the scanner, a servo motor turns opening the door lock
.• Hey presto, the door unlocks
ImportantThe library used for the Fingerprint scanner is the same one that is used for the Arduino. As a result, the library, in its current state will not work with the MSP430. To rectify this, do the following:
•Get the main code for the fingerprint sensor from the following link: https://github.com/sparkfun/Fingerprint_Scanner-TTL
•Go to the main Energia file where the.exe is stored and then find the Software Serial folder inside the./hardware/msp430/libraries subdirectory.
•Copy the Software Serial folder to the msp430/libraries
- The working of the GT-511C3 fingerprint scanner with MSP430 is shown in the above video.










{kind=link}
Comments