
Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
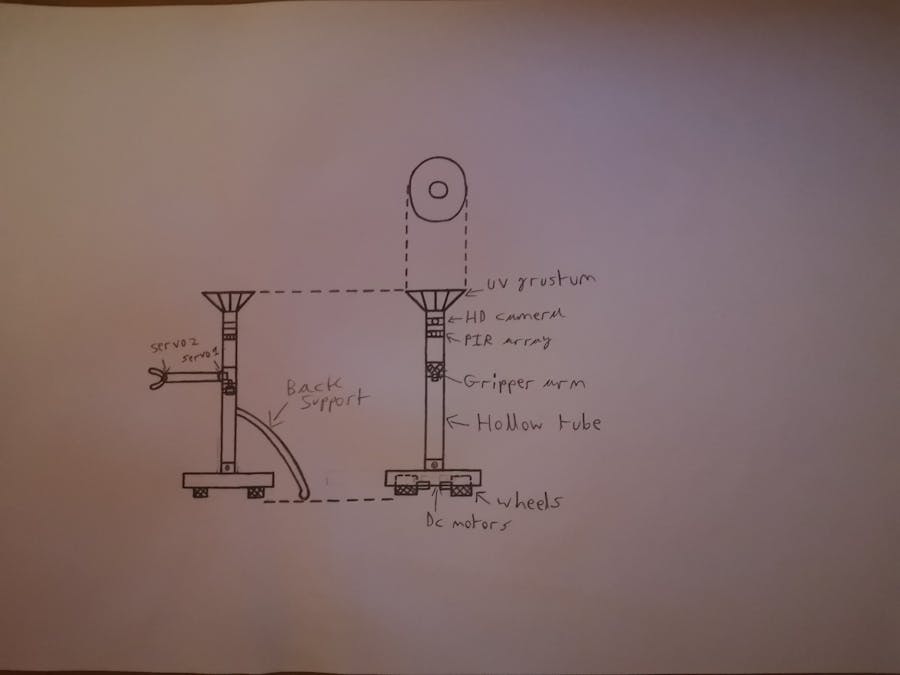
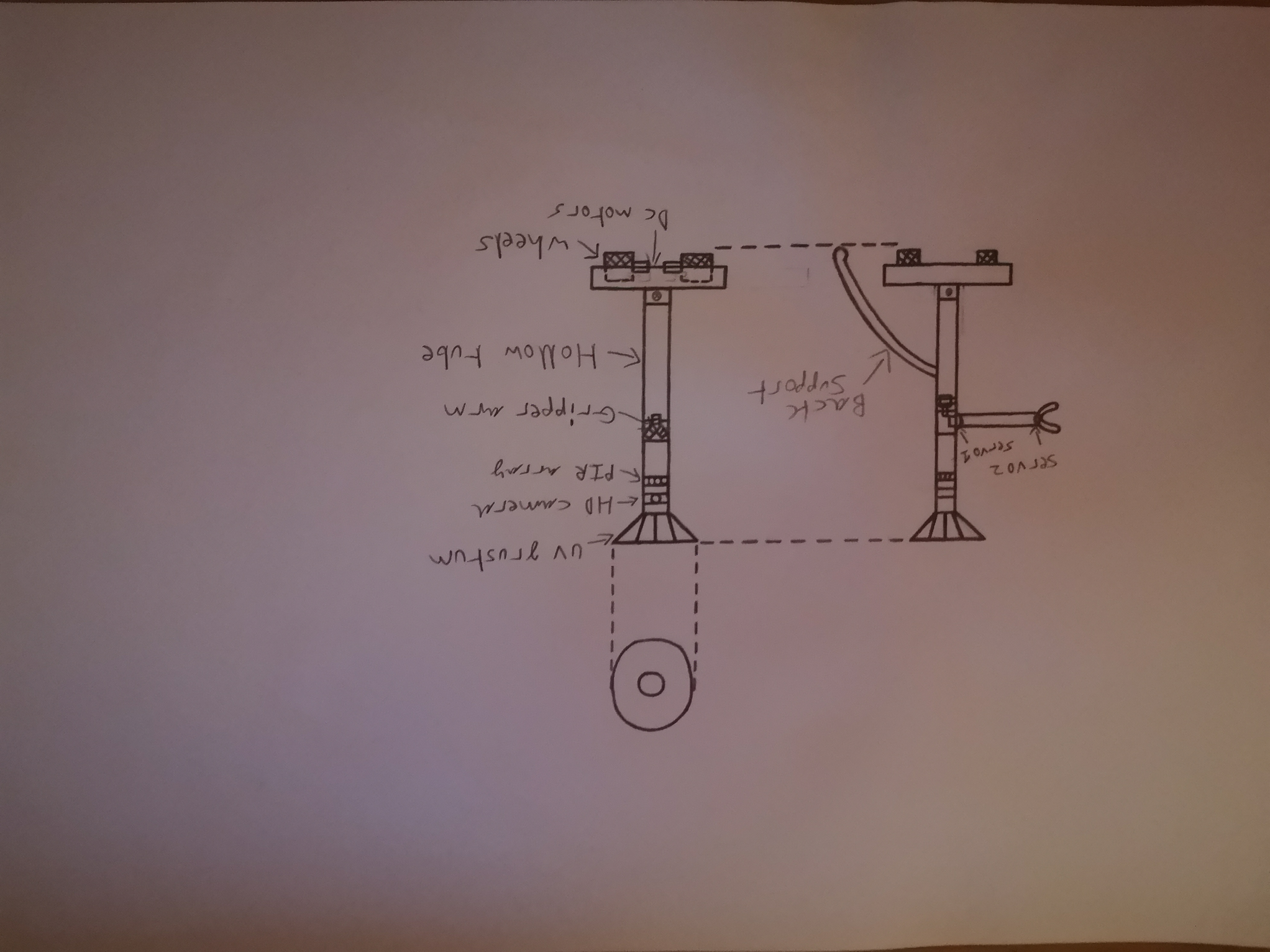
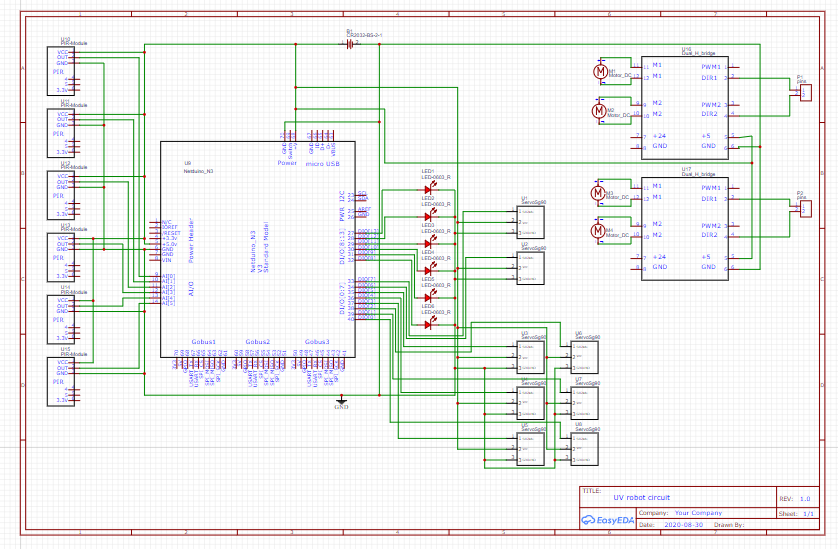
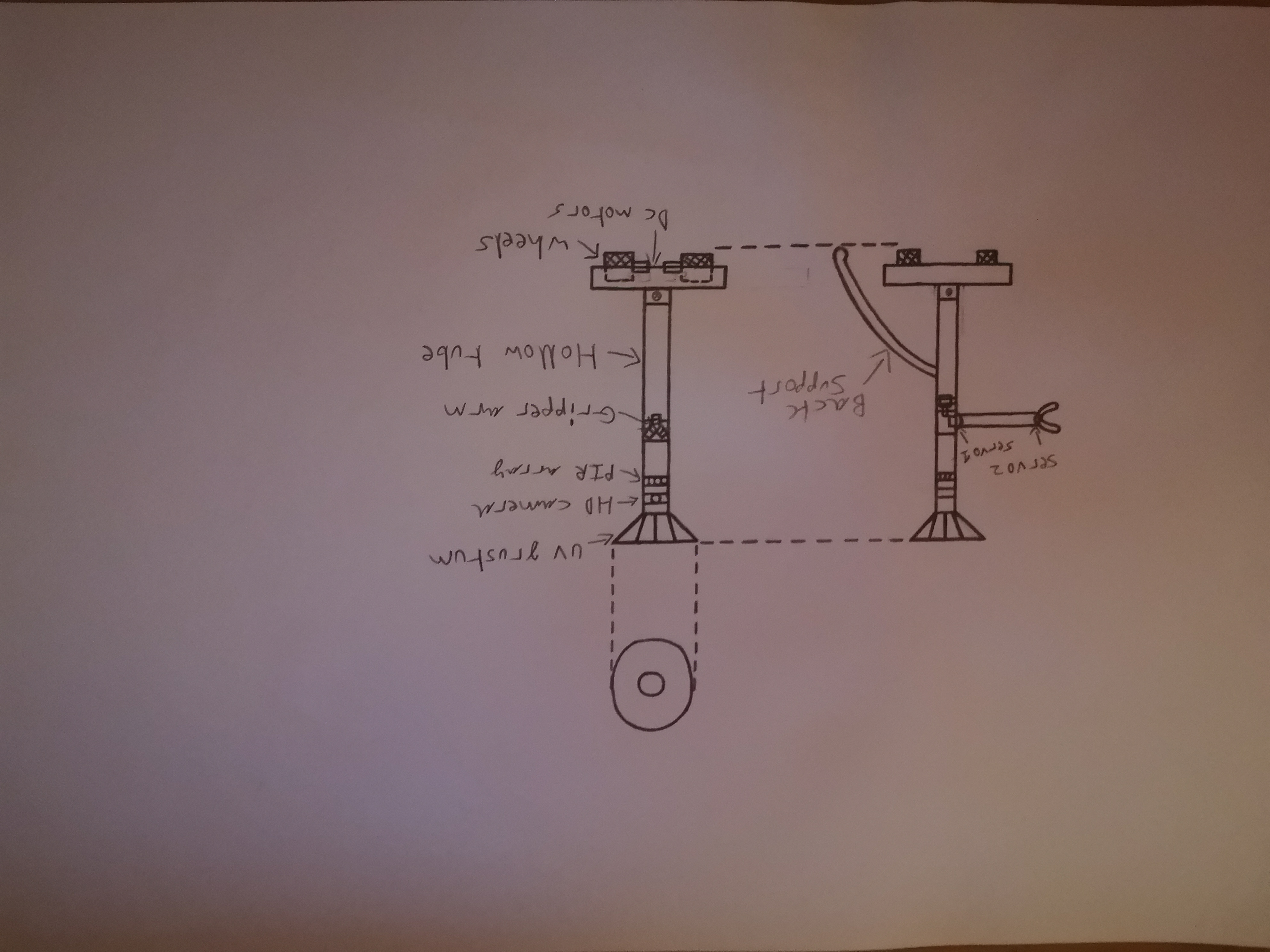
The UV frustum robot is a means of sanitising pathogen 'hotspots' by utilising a frustum and UV panels for wide area sanitisation. This design aims to capture full automation by utilising sensors and computer vision to cover a facility. Due to the robot being as autonomous as possible it improves safety towards humans by reduction in human exposure to pathogens, mainly covid-19.

Example floorplan
An example floorplan image to be uploaded into the robot to be converted into a path.

{kind=link}
{kind=link}
{kind=link}
{kind=link}

Comments