


Hardware components | ||||||
_copy_P5AWOdT4dX.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Problem
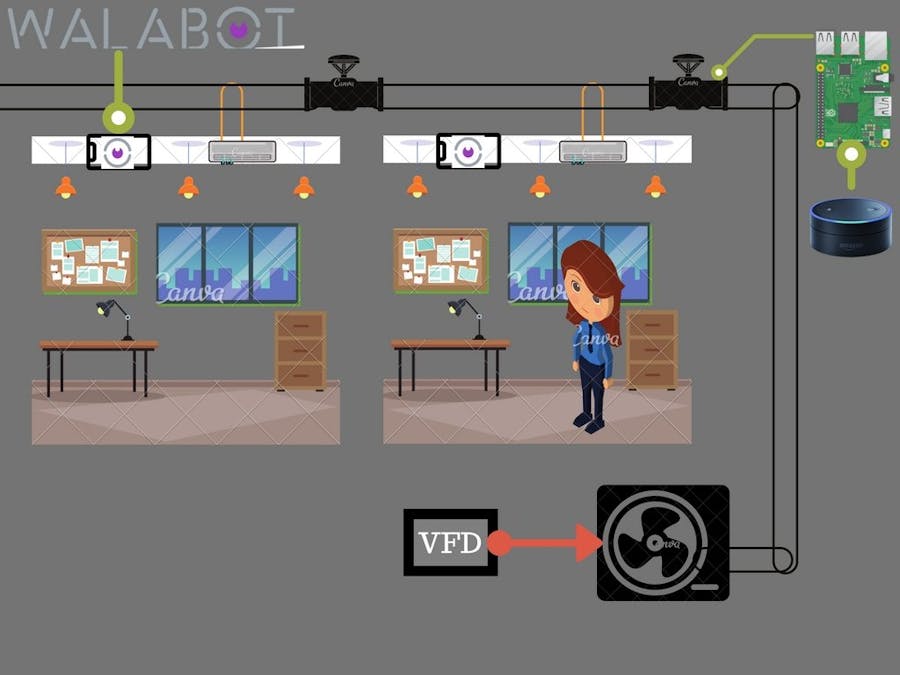
In large buildings and offices it is very difficult to balance the cooling in different places. some rooms require less supply of cooling and some room (more human occupancy) needs higher amount of cooling.
To balance the cooling we need to gather different parameters like how many humans in the room and recent activity of the room. so Walabot is playing the role of gathering the data from the room.
So the RF signal from the Walabot is used to gather the required data from room. The difference between the transmitted signal and received signal helps to find the parameters of the room.
SolutionThis project has two parts
- Embedded part
- Power electronics part
The embedded part is used to collect, analyze and host the data required for controlling things.
- Walabot
- Alexa
- Raspberry Pi
Walabot collects data such as object detection, object tracking, change detection and motion sensing of the room. And send this array of collected data to Raspberry Pi using USB communication.
After getting the appropriate data. The parameter of data is analyzed for further actions. And also data from the Walabot is sent to severer which is used to display information in mobile platform.
click here to know more about Walabot
AlexaUser can now use Alexa to get information of specific room. After getting data from Walabot, we need to configure data for Alexa skill kit. Using lambda function. follow this TUTORIAL. For setting up custom skill using Alexa skill kit.
Example of CLI commands that adds the trigger to lambda function:
Raspberry PiPi3 is used to gather data from Walabot using USB communication, Code for Alex to talk and finally transfer data to localhost server.
Power Electronics Partpower electronics things is used to make action based on the data gathered from the embedded system such as controlling the cooling flow valve and reducing the speed of the chiller plant fan which reduces the power consumption.
- Electronic Control Valves
- Variable Frequency Drive (VFD)
Electronic control valve or solenoid control valves are on-off control valves which either opens fully or closes tight upon receiving the electrical signal to solenoid pilot control.
So cooling pipe valve is controlled by analyzing the room data.
Variable Frequency DriveA variable frequency drive (VFD) is a type of motor controller that drives an electric motor by varying the frequency and voltage of its power supply.
The VFD is used to control the chiller plant fan. The more the cooling valve is opened the cooling required is higher so the speed of the fan is increased similarly speed is decreased when cooling required is lesser. This will reduce the power consumption by smart way.
Android Application
Once everything is finished Android App is deployed to visualize the data.
Moving object is tracked and location of the target is plotted in MATLAB .
Walabot Generates the Radio Frequency Wave in Spherical Cartesian Co-ordinate. MATLAB code detects the movement of the object inside the room and returns the exact location of the target.





Comments