


Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
| ||||||
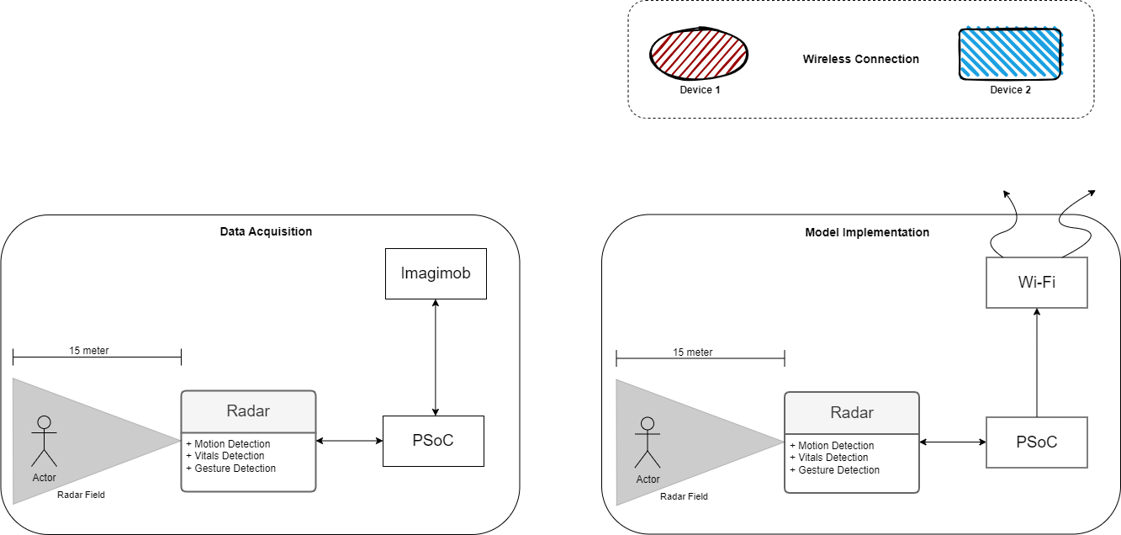
Autism Spectrum Disorder (ASD) is a complex neurodevelopmental disorder affecting communication, social interaction, and behavior, often characterized by repetitive movements like hand flapping. Early detection is crucial for effective intervention, and radar sensors offer a promising solution for detecting these gestures accurately in various lighting conditions while maintaining privacy. We developed a machine learning model using the DEEPCRAFT Studio tool.
{kind=link}
/******************************************************************************
* File Name: main.c
*
* Description: This is the source code for the Imagimob Data Collection Example
* for ModusToolbox.
*
* Related Document: See README.md
*
*
*******************************************************************************
* Copyright 2024, Cypress Semiconductor Corporation (an Infineon company) or
* an affiliate of Cypress Semiconductor Corporation. All rights reserved.
*
* This software, including source code, documentation and related
* materials ("Software") is owned by Cypress Semiconductor Corporation
* or one of its affiliates ("Cypress") and is protected by and subject to
* worldwide patent protection (United States and foreign),
* United States copyright laws and international treaty provisions.
* Therefore, you may use this Software only as provided in the license
* agreement accompanying the software package from which you
* obtained this Software ("EULA").
* If no EULA applies, Cypress hereby grants you a personal, non-exclusive,
* non-transferable license to copy, modify, and compile the Software
* source code solely for use in connection with Cypress's
* integrated circuit products. Any reproduction, modification, translation,
* compilation, or representation of this Software except as specified
* above is prohibited without the express written permission of Cypress.
*
* Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED
* WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress
* reserves the right to make changes to the Software without notice. Cypress
* does not assume any liability arising out of the application or use of the
* Software or any product or circuit described in the Software. Cypress does
* not authorize its products for use in any products where a malfunction or
* failure of the Cypress product may reasonably be expected to result in
* significant property damage, injury or death ("High Risk Product"). By
* including Cypress's product in a High Risk Product, the manufacturer
* of such system or application assumes all risk of such use and in doing
* so agrees to indemnify Cypress against all liability.
*******************************************************************************/
#include "cyhal.h"
#include "cybsp.h"
#include "stdlib.h"
#include "imu.h"
#include "audio.h"
#include "bmm.h"
#include "pressure.h"
#include "radar.h"
#include "config.h"
#include "streaming.h"
/*******************************************************************************
* Global Variables
********************************************************************************/
volatile bool pdm_pcm_flag;
volatile bool imu_flag;
volatile bool DPS_flag;
volatile bool bmm_flag;
volatile bool radar_flag;
volatile bool send_data = false;
/*******************************************************************************
* Function Prototypes
*******************************************************************************/
void gpio_interrupt_handler(void* handler_arg, cyhal_gpio_event_t event);
cyhal_gpio_callback_data_t cb_data =
{
.callback = gpio_interrupt_handler,
.callback_arg = NULL
};
/*******************************************************************************
* Function Name: main
********************************************************************************
* Summary:
* This is the main function. It sets up either the PDM or IMU based on the
* config.h file. main continuously checks flags, signaling that data is ready
* to be streamed over UART or USB and initiates the transfer.
*
* Parameters:
* void
*
* Return:
* int
*
*******************************************************************************/
int main(void)
{
cy_rslt_t result;
/* Initialize the device and board peripherals */
result = cybsp_init() ;
if (result != CY_RSLT_SUCCESS)
{
CY_ASSERT(0);
}
/* Enable global interrupts */
__enable_irq();
/* Setup button to press, to initiate data transfer */
cyhal_gpio_init(CYBSP_USER_BTN1, CYHAL_GPIO_DIR_INPUT, CYBSP_USER_BTN_DRIVE, 1);
cyhal_gpio_register_callback(CYBSP_USER_BTN, &cb_data);
cyhal_gpio_enable_event(CYBSP_USER_BTN, CYHAL_GPIO_IRQ_FALL, 3, true);
/* Initialize the streaming interface */
mtb_data_streaming_interface_t stream;
streaming_init(&stream);
#if COLLECTION_MODE_SELECT == IMU_COLLECTION
/* Initialize IMU transmit buffers */
uint8_t transmit_imu[4 * IMU_AXIS] = {0};
float *imu_raw_data = (float*) transmit_imu;
/* Start the imu and timer */
result = imu_init();
#endif
#if COLLECTION_MODE_SELECT == PDM_COLLECTION
/* Initialize PDM transmit buffers */
uint8_t transmit_pdm[2 * FRAME_SIZE] = {0};
int16_t *pdm_raw_data = (int16_t *) transmit_pdm;
/* Configure PDM, PDM clocks, and PDM event */
result = pdm_init();
#endif
#if COLLECTION_MODE_SELECT == BMM_COLLECTION
/* Initialize IMU transmit buffers */
uint8_t transmit_bmm[4 * bmm_AXIS] = {0};
float *bmm_raw_data = (float*) transmit_bmm;
/* Start the imu and timer */
result = bmm_init();
#endif
#if COLLECTION_MODE_SELECT == DPS_COLLECTION
int8 val = 0;
/* Initialize Pressure transmit buffers */
uint8_t transmit_DPS[4 * 2]={0};
float *dps_raw_data = (float*) transmit_DPS;
/* Configure DPS sensor */
result = DPS_init();
#endif
#if COLLECTION_MODE_SELECT == RADAR_COLLECTION
/* Initialize IMU transmit buffers */
uint8_t transmit_radar[300] = {0};
int16_t *radar_raw_data = (int16_t*) transmit_radar;
/* Start the imu and timer */
result = radar_init();
#endif
/* Initialization failed */
if(CY_RSLT_SUCCESS != result)
{
/* Reset the system on sensor fail */
NVIC_SystemReset();
}
/* Wait until the kit button is pressed */
while(false == send_data);
for(;;)
{
/* Transmit IMU data or PDM data based on config.h */
#if COLLECTION_MODE_SELECT == IMU_COLLECTION
if(true == imu_flag)
{
imu_flag = false;
/* Store IMU data */
imu_get_data(imu_raw_data);
/* Transmit data over UART */
mtb_data_streaming_send(&stream, transmit_imu, sizeof(transmit_imu), NULL);
}
#endif
#if COLLECTION_MODE_SELECT == PDM_COLLECTION
if(true == pdm_pcm_flag)
{
pdm_pcm_flag = false;
/* Store PDM data */
pdm_preprocessing_feed(pdm_raw_data);
/* Transmit data over UART */
mtb_data_streaming_send(&stream, transmit_pdm, sizeof(transmit_pdm), NULL);
}
#endif
#if COLLECTION_MODE_SELECT == BMM_COLLECTION
if(true == bmm_flag)
{
bmm_flag= false;
/* Store IMU data */
bmm_get_data(bmm_raw_data);
/* Transmit data over UART */
mtb_data_streaming_send(&stream, transmit_bmm, sizeof(transmit_bmm), NULL);
}
#endif
#if COLLECTION_MODE_SELECT == DPS_COLLECTION
if(true == DPS_flag)
{
DPS_flag = false;
/* Store Pressure data */
val = dps_get_data(dps_raw_data);
if(1 == val)
{
/* Transmit data over UART */
mtb_data_streaming_send(&stream, transmit_DPS, sizeof(transmit_DPS), NULL);
}
}
#endif
#if COLLECTION_MODE_SELECT == RADAR_COLLECTION
if(true == radar_flag)
{
radar_flag = false;
/* Store PDM data */
radar_get_data(radar_raw_data);
/* Transmit data over UART */
mtb_data_streaming_send(&stream, transmit_radar, sizeof(transmit_radar), NULL);
}
#endif
}
}
/*******************************************************************************
* Function Name: gpio_interrupt_handler
********************************************************************************
* Summary:
* When the on kit button is pressed, this sets a flag and exits.
*
* Parameters:
* void
*
* Return:
* int
*
*******************************************************************************/
void gpio_interrupt_handler(void* handler_arg, cyhal_gpio_event_t event)
{
(void) handler_arg;
(void) event;
/* Set flag */
send_data = true;
}
/* [] END OF FILE */
/******************************************************************************
* File Name: radar.c
*
* Description: This file implements the interface with the radar sensor, as
* a timer to feed the pre-processor at 50Hz.
*
* Related Document: See README.md
*
*
*******************************************************************************
* Copyright 2024, Cypress Semiconductor Corporation (an Infineon company) or
* an affiliate of Cypress Semiconductor Corporation. All rights reserved.
*
* This software, including source code, documentation and related
* materials ("Software") is owned by Cypress Semiconductor Corporation
* or one of its affiliates ("Cypress") and is protected by and subject to
* worldwide patent protection (United States and foreign),
* United States copyright laws and international treaty provisions.
* Therefore, you may use this Software only as provided in the license
* agreement accompanying the software package from which you
* obtained this Software ("EULA").
* If no EULA applies, Cypress hereby grants you a personal, non-exclusive,
* non-transferable license to copy, modify, and compile the Software
* source code solely for use in connection with Cypress's
* integrated circuit products. Any reproduction, modification, translation,
* compilation, or representation of this Software except as specified
* above is prohibited without the express written permission of Cypress.
*
* Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED
* WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress
* reserves the right to make changes to the Software without notice. Cypress
* does not assume any liability arising out of the application or use of the
* Software or any product or circuit described in the Software. Cypress does
* not authorize its products for use in any products where a malfunction or
* failure of the Cypress product may reasonably be expected to result in
* significant property damage, injury or death ("High Risk Product"). By
* including Cypress's product in a High Risk Product, the manufacturer
* of such system or application assumes all risk of such use and in doing
* so agrees to indemnify Cypress against all liability.
*******************************************************************************/
#include "radar.h"
#include <inttypes.h>
#include <stdio.h>
#include "cyhal.h"
#include "cybsp.h"
#include <stdlib.h>
#include "cy_pdl.h"
#include "xensiv_bgt60trxx_mtb.h"
#include "radar_settings.h"
/*******************************************************************************
* Macros
*******************************************************************************/
#define XENSIV_BGT60TRXX_SPI_FREQUENCY (25000000UL)
#define NUM_SAMPLES_PER_FRAME (XENSIV_BGT60TRXX_CONF_NUM_SAMPLES_PER_CHIRP *\
XENSIV_BGT60TRXX_CONF_NUM_CHIRPS_PER_FRAME *\
XENSIV_BGT60TRXX_CONF_NUM_RX_ANTENNAS)
#define NUM_CHIRPS_PER_FRAME XENSIV_BGT60TRXX_CONF_NUM_CHIRPS_PER_FRAME
#define NUM_SAMPLES_PER_CHIRP XENSIV_BGT60TRXX_CONF_NUM_SAMPLES_PER_CHIRP
#define RADAR_SCAN_RATE 50
#define RADAR_TIMER_FREQUENCY 100000
#define RADAR_TIMER_PERIOD (RADAR_TIMER_FREQUENCY/RADAR_SCAN_RATE)
#define RADAR_TIMER_PRIORITY 3
/*******************************************************************************
* Global Variables
*******************************************************************************/
/* Global timer used for getting data */
cyhal_timer_t radar_timer;
#ifdef TARGET_APP_CY8CKIT_062S2_AI
static cyhal_spi_t spi_obj;
static xensiv_bgt60trxx_mtb_t bgt60_obj;
#endif
uint16_t bgt60_buffer[NUM_SAMPLES_PER_FRAME] __attribute__((aligned(2)));
/*******************************************************************************
* Local Function Prototypes
*******************************************************************************/
void radar_interrupt_handler(void* callback_arg, cyhal_timer_event_t event);
cy_rslt_t radar_timer_init(void);
/*******************************************************************************
* Function Name: radar_init
********************************************************************************
* Summary:
* A function used to initialize the Radar sensor Present in
* Ai Evaluation Kit(CY8CKIT-062S2-AI).
* Starts a timer that triggers an interrupt at 50Hz.
*
* Parameters:
* None
*
* Return:
* The status of the initialization.
*
*
*******************************************************************************/
cy_rslt_t radar_init(void)
{
#ifdef TARGET_APP_CY8CKIT_062S2_AI
cy_rslt_t result;
if (cyhal_spi_init(&spi_obj,
PIN_XENSIV_BGT60TRXX_SPI_MOSI,
PIN_XENSIV_BGT60TRXX_SPI_MISO,
PIN_XENSIV_BGT60TRXX_SPI_SCLK,
NC,
NULL,
8,
CYHAL_SPI_MODE_00_MSB,
false) != CY_RSLT_SUCCESS)
{
printf("ERROR: cyhal_spi_init failed\n");
return -1;
}
/* Reduce drive strength to improve EMI */
Cy_GPIO_SetSlewRate(CYHAL_GET_PORTADDR(PIN_XENSIV_BGT60TRXX_SPI_MOSI), CYHAL_GET_PIN(PIN_XENSIV_BGT60TRXX_SPI_MOSI), CY_GPIO_SLEW_FAST);
Cy_GPIO_SetDriveSel(CYHAL_GET_PORTADDR(PIN_XENSIV_BGT60TRXX_SPI_MOSI), CYHAL_GET_PIN(PIN_XENSIV_BGT60TRXX_SPI_MOSI), CY_GPIO_DRIVE_1_8);
Cy_GPIO_SetSlewRate(CYHAL_GET_PORTADDR(PIN_XENSIV_BGT60TRXX_SPI_SCLK), CYHAL_GET_PIN(PIN_XENSIV_BGT60TRXX_SPI_SCLK), CY_GPIO_SLEW_FAST);
Cy_GPIO_SetDriveSel(CYHAL_GET_PORTADDR(PIN_XENSIV_BGT60TRXX_SPI_SCLK), CYHAL_GET_PIN(PIN_XENSIV_BGT60TRXX_SPI_SCLK), CY_GPIO_DRIVE_1_8);
/* Set the data rate to 25 Mbps */
if (cyhal_spi_set_frequency(&spi_obj, XENSIV_BGT60TRXX_SPI_FREQUENCY) != CY_RSLT_SUCCESS)
{
printf("ERROR: cyhal_spi_set_frequency failed\n");
return -1;
}
if (xensiv_bgt60trxx_mtb_init(&bgt60_obj,
&spi_obj,
PIN_XENSIV_BGT60TRXX_SPI_CSN,
PIN_XENSIV_BGT60TRXX_RSTN,
register_lst,
XENSIV_BGT60TRXX_CONF_NUM_REGS) != CY_RSLT_SUCCESS)
{
printf("ERROR: xensiv_bgt60trxx_mtb_init failed\n");
return -1;
}
radar_flag = false;
result = radar_timer_init();
if(CY_RSLT_SUCCESS != result)
{
return result;
}
return CY_RSLT_SUCCESS;
#else
return 0;
#endif
}
/*******************************************************************************
* Function Name: radar_timer_init
********************************************************************************
* Summary:
* Sets up an interrupt that triggers at the desired frequency.
*
* Returns:
* The status of the initialization.
*
*
*******************************************************************************/
cy_rslt_t radar_timer_init(void)
{
cy_rslt_t rslt;
const cyhal_timer_cfg_t timer_cfg =
{
.compare_value = 0, /* Timer compare value, not used */
.period = RADAR_TIMER_PERIOD, /* Defines the timer period */
.direction = CYHAL_TIMER_DIR_UP, /* Timer counts up */
.is_compare = false, /* Don't use compare mode */
.is_continuous = true, /* Run the timer indefinitely */
.value = 0 /* Initial value of counter */
};
/* Initialize the timer object. Does not use pin output ('pin' is NC) and
* does not use a pre-configured clock source ('clk' is NULL). */
rslt = cyhal_timer_init(&radar_timer, NC, NULL);
if (CY_RSLT_SUCCESS != rslt)
{
return rslt;
}
/* Apply timer configuration such as period, count direction, run mode, etc. */
rslt = cyhal_timer_configure(&radar_timer, &timer_cfg);
if (CY_RSLT_SUCCESS != rslt)
{
return rslt;
}
/* Set the frequency of timer to 100KHz */
rslt = cyhal_timer_set_frequency(&radar_timer, RADAR_TIMER_FREQUENCY);
if (CY_RSLT_SUCCESS != rslt)
{
return rslt;
}
/* Assign the ISR to execute on timer interrupt */
cyhal_timer_register_callback(&radar_timer, radar_interrupt_handler, NULL);
/* Set the event on which timer interrupt occurs and enable it */
cyhal_timer_enable_event(&radar_timer, CYHAL_TIMER_IRQ_TERMINAL_COUNT, RADAR_TIMER_PRIORITY, true);
/* Start the timer with the configured settings */
rslt = cyhal_timer_start(&radar_timer);
if (CY_RSLT_SUCCESS != rslt)
{
return rslt;
}
return CY_RSLT_SUCCESS;
}
/*******************************************************************************
* Function Name: radar_interrupt_handler
********************************************************************************
* Summary:
* Interrupt handler for timer. Interrupt handler will get called at 50Hz and
* sets a flag that can be checked in main.
*
* Parameters:
* callback_arg: not used
* event: not used
*
*
*******************************************************************************/
void radar_interrupt_handler(void *callback_arg, cyhal_timer_event_t event)
{
(void) callback_arg;
(void) event;
radar_flag = true;
}
/*******************************************************************************
* Function Name: radar_feed
********************************************************************************
* Summary:
* Reads data from the radar sensor and stores it in a buffer.
*
* Parameters:
* radar_data: Stores RADAR sensor data
*
*
*******************************************************************************/
void radar_get_data(int16_t *radar_data)
{
#ifdef TARGET_APP_CY8CKIT_062S2_AI
cy_rslt_t result;
result = xensiv_bgt60trxx_get_fifo_data(&bgt60_obj.dev,bgt60_buffer,NUM_SAMPLES_PER_FRAME);
if (CY_RSLT_SUCCESS == result)
{
for(uint32_t i =0;i< 128; i++)
{
radar_data[i] = bgt60_buffer[i];
}
}
#endif
}
/******************************************************************************
* File Name: radar.h
*
* Description: This file contains the function prototypes and constants used
* in radar.c.
*
* Related Document: See README.md
*
*
*******************************************************************************
* Copyright 2024, Cypress Semiconductor Corporation (an Infineon company) or
* an affiliate of Cypress Semiconductor Corporation. All rights reserved.
*
* This software, including source code, documentation and related
* materials ("Software") is owned by Cypress Semiconductor Corporation
* or one of its affiliates ("Cypress") and is protected by and subject to
* worldwide patent protection (United States and foreign),
* United States copyright laws and international treaty provisions.
* Therefore, you may use this Software only as provided in the license
* agreement accompanying the software package from which you
* obtained this Software ("EULA").
* If no EULA applies, Cypress hereby grants you a personal, non-exclusive,
* non-transferable license to copy, modify, and compile the Software
* source code solely for use in connection with Cypress's
* integrated circuit products. Any reproduction, modification, translation,
* compilation, or representation of this Software except as specified
* above is prohibited without the express written permission of Cypress.
*
* Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED
* WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress
* reserves the right to make changes to the Software without notice. Cypress
* does not assume any liability arising out of the application or use of the
* Software or any product or circuit described in the Software. Cypress does
* not authorize its products for use in any products where a malfunction or
* failure of the Cypress product may reasonably be expected to result in
* significant property damage, injury or death ("High Risk Product"). By
* including Cypress's product in a High Risk Product, the manufacturer
* of such system or application assumes all risk of such use and in doing
* so agrees to indemnify Cypress against all liability.
*******************************************************************************/
#ifndef RADAR_H_
#define RADAR_H_
#include "cy_result.h"
#include "stdbool.h"
#include "resource_map.h"
/******************************************************************************
* Global Variables
*****************************************************************************/
cy_rslt_t radar_init(void);
/*******************************************************************************
* Function Prototypes
*******************************************************************************/
extern volatile bool radar_flag;
void radar_get_data(int16_t *radar_data);
#endif /* RADAR_H_ */

Comments