PIR (passive infrared) motion sensor detects any movement of objects, human or animals. Mostly they are used in automatically activated lighting and burglar alarm systems.
Every object with temperature above absolute zero emit heat in the form of infrared radiation. PIR motion sensor detects change in the infrared radiation impinging on it. When any object or human passes in the front of the PIR sensor, the temperature in sensor’s field of view will rise from ambient temperature to object temperature and then back again to ambient temperature. PIR sensor converts this temperature change into the change in output voltage and that change in voltage is considered as motion detected.
Components
PIR Sensor
1 / 2 • PIR Sensor
PIR Sensor
Sensor
Sensor has three pins. Power (VCC), Ground (GND) and output (OUT) pin which gives logic high if motion is detected. It has two potentiometers. One for sensitivity adjustment and second for adjusting the time the output signal stays high when motion is detected.
VCC, OUT and GND pins
Potentiometers to adjust Sensitivity and Output Time
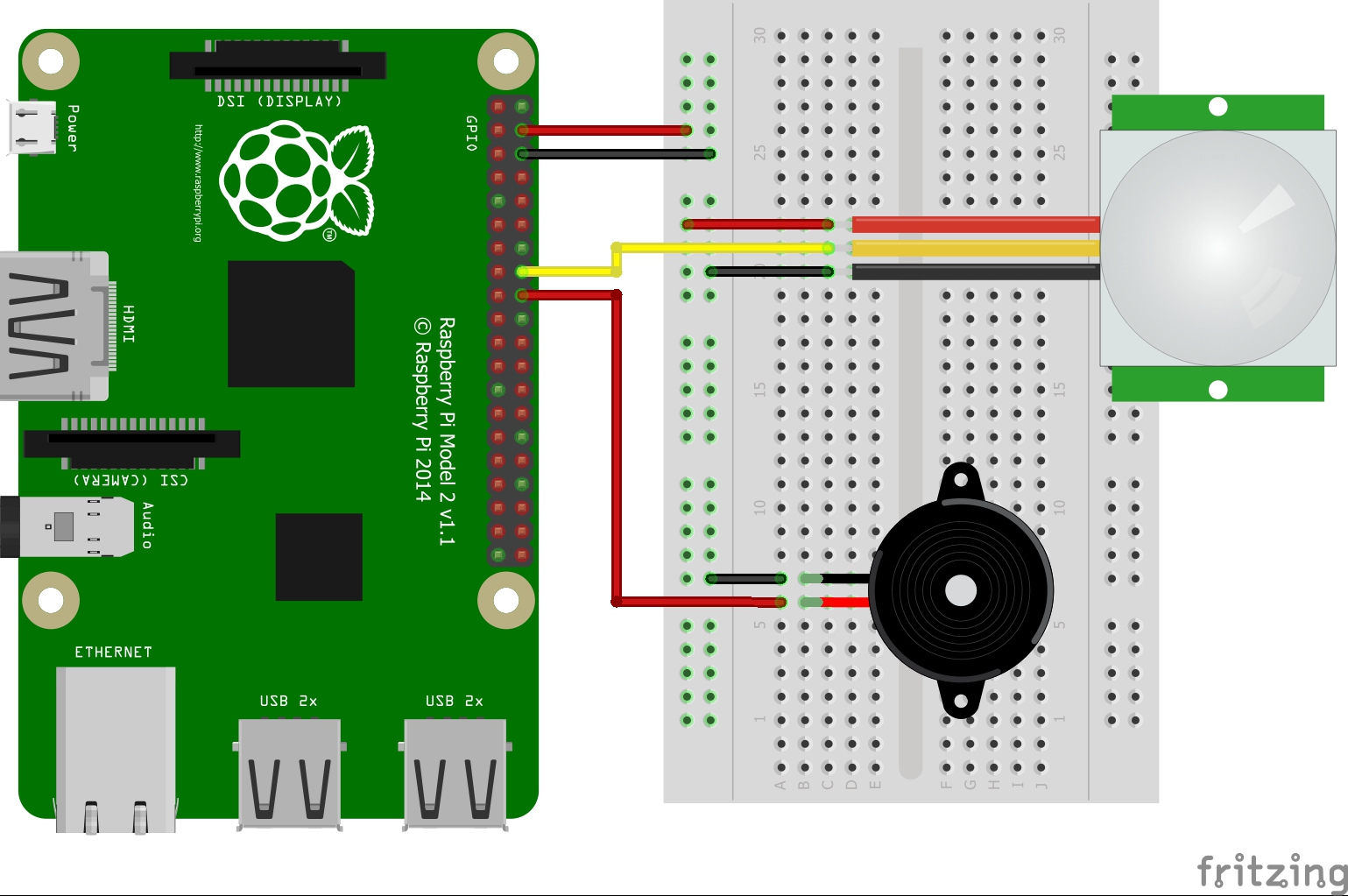
Create new python file PIR.py and enter the following code. To run the code, open the terminal and go to the directory where your PIR.py is located. Then enter the command " sudo python PIR.py " and hit enter
importRPi.GPIOasGPIOimporttimeGPIO.setmode(GPIO.BCM)GPIO.setup(23,GPIO.IN)#PIRGPIO.setup(24,GPIO.OUT)#BUzzertry:time.sleep(2)# to stabilize sensorwhileTrue:ifGPIO.input(23):GPIO.output(24,True)time.sleep(0.5)#Buzzer turns on for 0.5 secGPIO.output(24,False)print("Motion Detected...")time.sleep(5)#to avoid multiple detectiontime.sleep(0.1)#loop delay, should be less than detection delayexcept:GPIO.cleanup()





{kind=link}
Comments