/* Voice Controlled Lego Car
* Created by Hanis Rozali
*/
String voice;
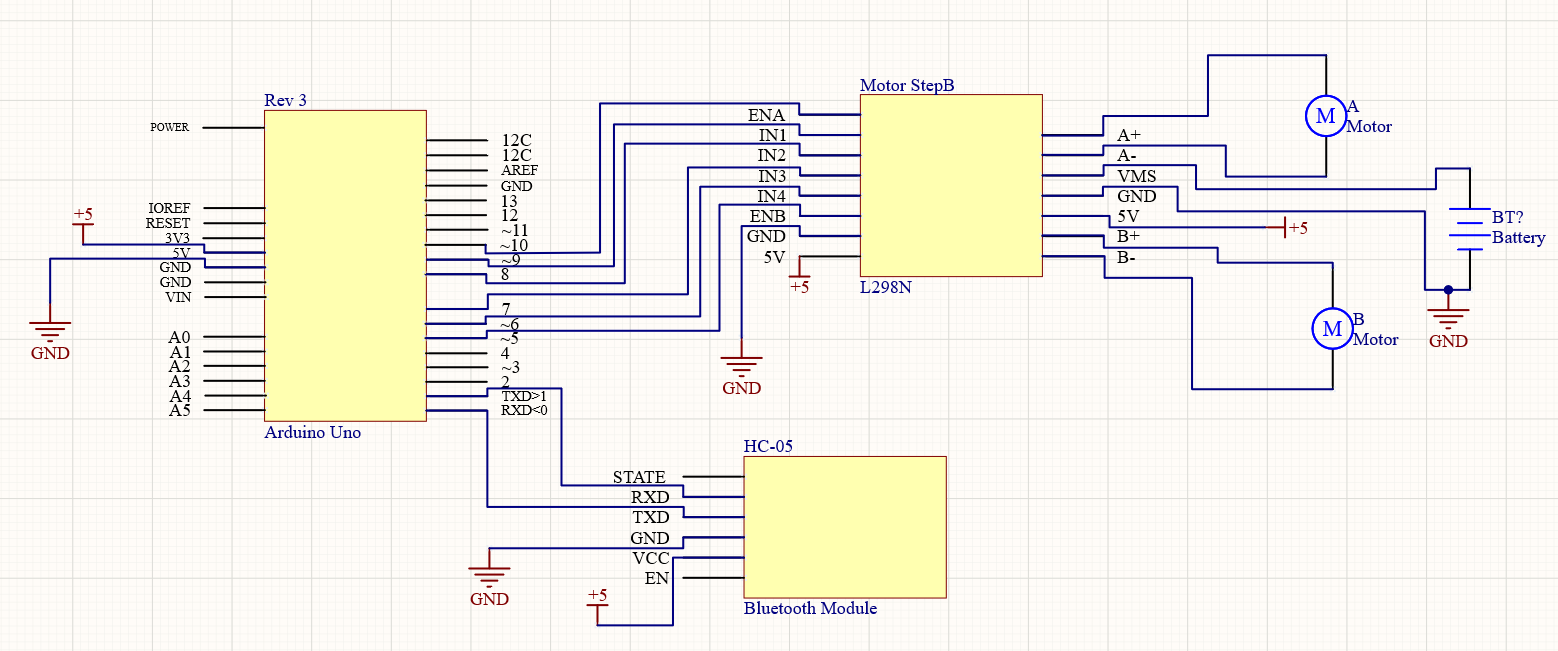
//motor A
int ENA = 10;
int IN1 = 9;
int IN2 = 8;
// motor B
int ENB = 5;
int IN3 = 7;
int IN4 = 6;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
// put your main code here, to run repeatedly:
void loop() {
while (Serial.available()){ //Check if there is an available byte to read
delay(10); //Delay added to make thing stable
char words = Serial.read(); //Conduct a serial read
if (words == '#') {break;} //Exit the loop when the # is detected after the word
voice += words; //Shorthand for voice = voice + words
}
if (voice.length() > 0){
Serial.print(voice);
if (voice == "*go" || voice == "*now") {
forward();
}else if(voice == "*back" || voice == "*move backward") {
backward();
}else if (voice == "*turn right") {
right();
}else if (voice == "*turn left") {
left();
}else if (voice == "*move faster") {
faster();
}else if (voice == "*start") {
start();
}else if (voice == "*one" || voice == "*1") {
one();
}else if (voice == "*three" || voice == "*3") {
three();
}else if (voice == "*five" || voice == "*5") {
five();
}else if (voice == "*zero" || voice == "*stop") {
Stop();
}
voice=""; //Reset the variable after initiating
}
}
void forward(){
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 180);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 180);
delay(5000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void backward() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(5000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void right() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(500);
forward();
}
void left() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(500);
forward();
}
void start(){
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 50);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 50);
}
void one() {
analogWrite(ENA, 100);
analogWrite(ENB, 100);
}
void three() {
analogWrite(ENA, 180);
analogWrite(ENB, 180);
}
void five() {
analogWrite(ENA, 225);
analogWrite(ENB, 225);
}
void faster() {
analogWrite(ENA, 210);
analogWrite(ENB, 210);
}
void Stop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments