/**
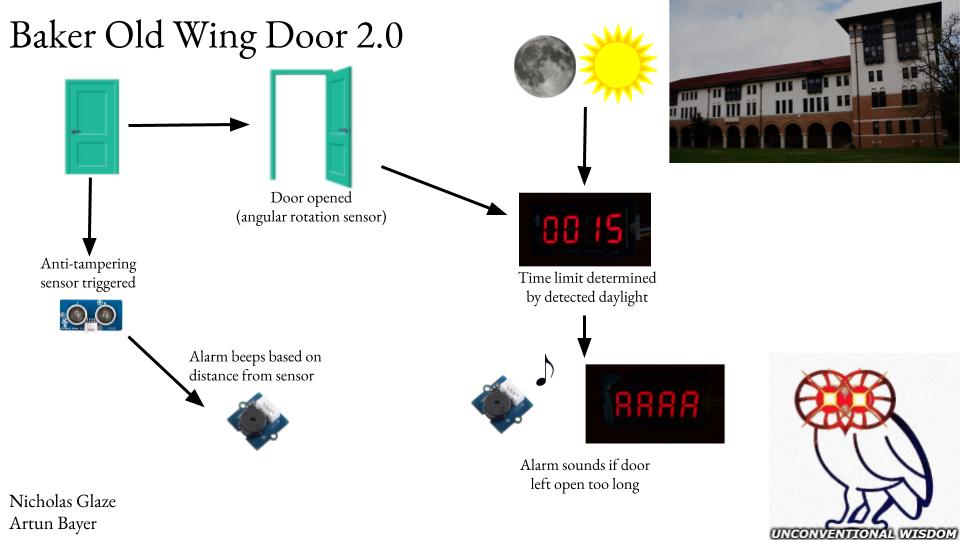
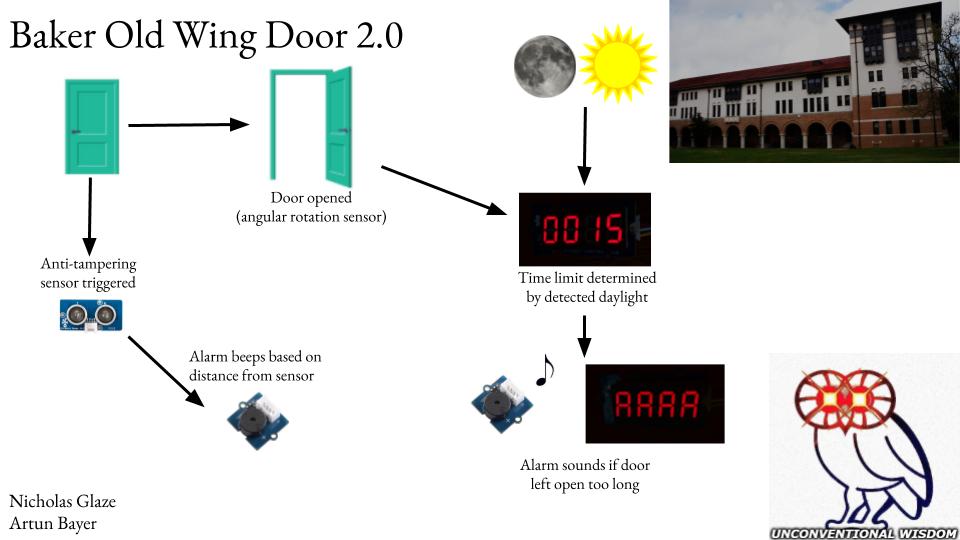
* Baker Old Wing Door 2.0
*
* Created by: Nicholas Glaze (nkg2)
* Artun Bayer (ab116)
* ELEC 220
*/
#include "TM1637.h"
#include "Ultrasonic.h"
/* Macro Define */
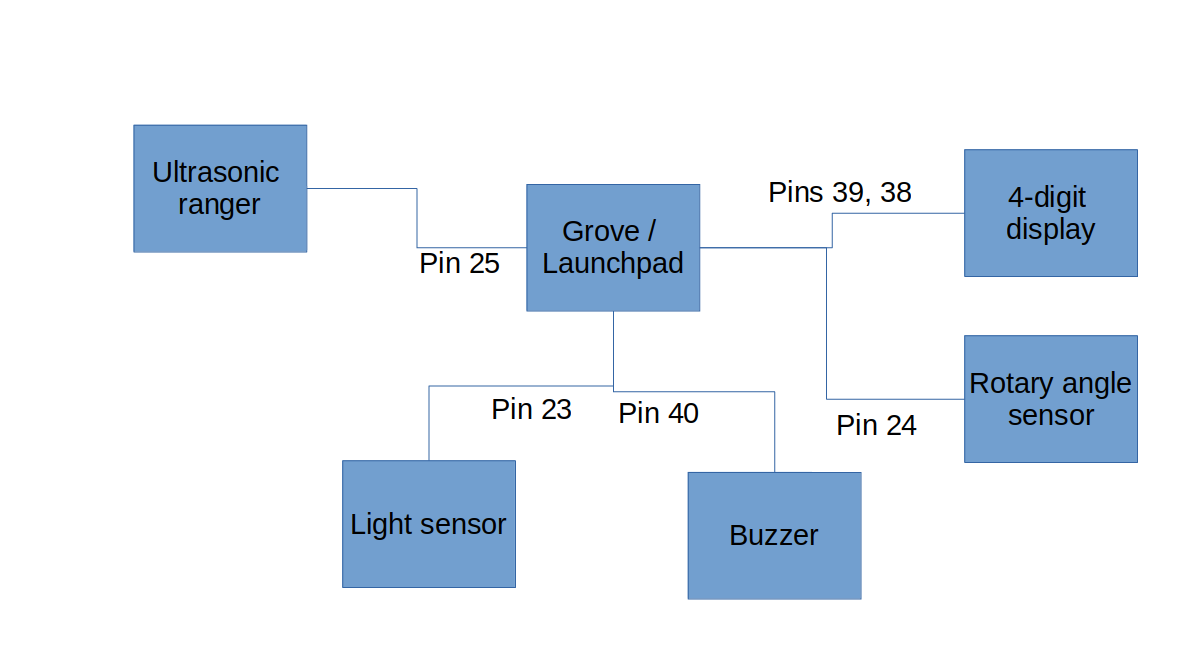
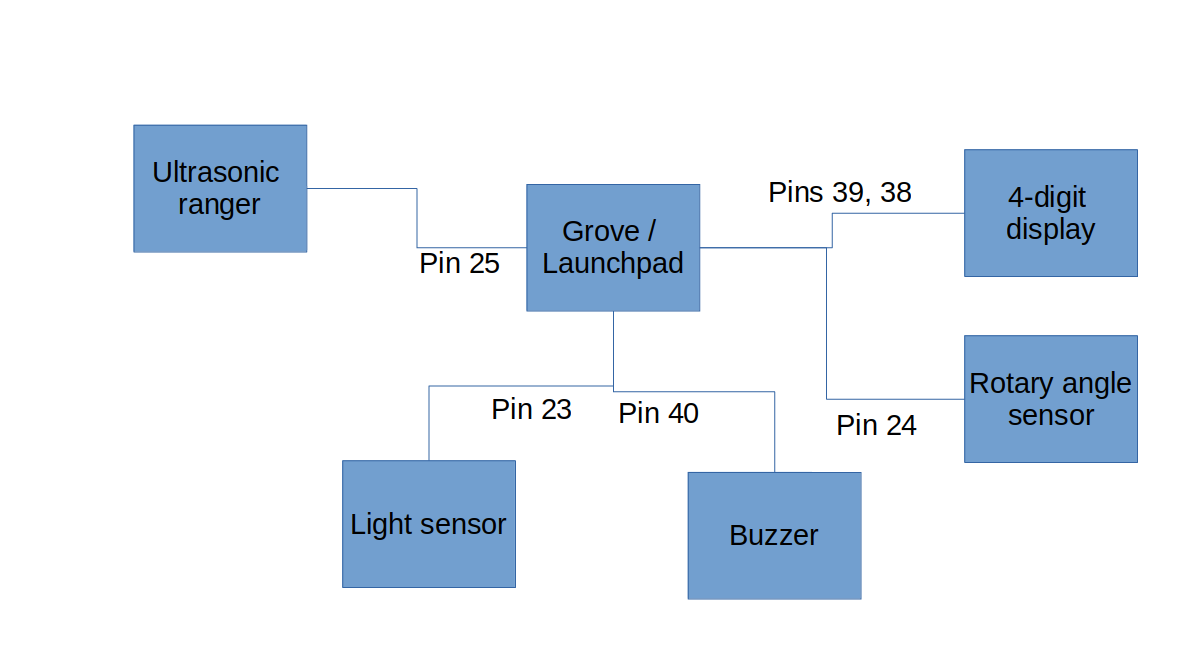
#define CLK 39 /* 4-Digit Display clock pin */
#define DIO 38 /* 4-Digit Display data pin */
#define ROTARY_ANGLE_P 24 /* pin of rotary angle sensor */
#define BUZZER 40
#define LIGHT_SENSOR 23
#define ULTRASONIC 25
/* Global Variables */
TM1637 tm1637(CLK, DIO); /* 4-Digit Display object */
int analog_value = 0; /* variable to store the value coming from rotary angle sensor */
void setup()
{
/* Initialize 4-Digit Display */
tm1637.init();
tm1637.set(BRIGHT_TYPICAL);
pinMode(BUZZER, OUTPUT);
update_clock(0);
delay(1000);
}
boolean door_open(){//True if door is open
return analogRead(ROTARY_ANGLE_P) > 100;
}
int time_limit(){//Compute time limit with linear function
return floor(.004082*analogRead(LIGHT_SENSOR)+5.102);
}
void scream(){//Display "AAAA" on 4-digit display
for(int i = 0; i < 4; i++){
tm1637.display(i, 10);
}
}
void sound_open_alarm()
{//Play alarm (sick beat)
scream();
while(door_open()) drop_beat();
}
int pitch(int dist){//Calculate pitch based on linear function
return floor(45*dist+55)/2;
}
void sound_tamper_alarm(){//Sound alarm based on object distance from ultrasonic sensor
scream();
long dist = measure_dist();
int p;
while(dist < 3000){
for(int i = 0; i < 10; i++){
p = pitch(dist);
//update_clock(dist);
digitalWrite(BUZZER, HIGH);
delayMicroseconds(p);
digitalWrite(BUZZER, LOW);
delayMicroseconds(p);
}
dist = measure_dist();
}
update_clock(0000);
}
void update_clock(int n){
//Displays the number n on the 4-digit display
for(int i = 3; i > -1; i--){
tm1637.display(i, n % 10);
n /= 10;
}
}
void count_down(int time_limit){//Run countdown on timer, starting from time_limit
//Counts the timer down from time_limit to 0
int time_left = time_limit;
while (time_left >= 0 and door_open()){
if(measure_dist() < 3000) sound_tamper_alarm();
update_clock(time_left);
time_left -= 1;
delay(1000);
}
if(door_open()){
sound_open_alarm();
}
update_clock(0);
}
/* the loop() method runs over and over again */
void loop()
{
if(door_open()){
count_down(time_limit());
}
if(measure_dist() < 3000){
sound_tamper_alarm();
}
}
void drop_beat(){//Play a sick beat
int length = 16; /* the number of notes */
char notes[] = "121 12123 3 4546"; //notes in the song
float beats[] = { 1, 1, 1, 1, 1, 1, 1, 1, 0.6, 1 , 0.6, 1, 1, 1, 1, 1}; //length of each note
int tempo = 150;
/* the setup() method runs once, when the sketch starts */
int i = 0;
//Loop through each note
while(i < length && door_open())
{
//space indicates a pause
if(notes[i] == ' ')
{
delay(beats[i] * tempo);
}
else
{
playNote(notes[i], beats[i] * tempo);
}
delay(tempo / 2); /* delay between notes */
i++;
}
}
/* play tone */
void playTone(int tone, int duration)
{
for (long i = 0; i < duration * 1000L; i += tone * 2)
{
digitalWrite(BUZZER, HIGH);
delayMicroseconds(tone);
digitalWrite(BUZZER, LOW);
delayMicroseconds(tone);
}
}
char names[] = { '2', '1', '6', '5', '4', '3',};
float tones[] = { 587/2, 698/2, 880/2, 554/2, 659/2, 440/2};
void playNote(char note, int duration)
{
// play the tone corresponding to the note name
for (int i = 0; i < 6; i++)
{
if (names[i] == note)
{
playTone(tones[i], duration);
}
}
}
long measure_dist(){//Measure object distance from ultrasonic sensor
pinMode(ULTRASONIC, OUTPUT);
digitalWrite(ULTRASONIC, LOW);
delayMicroseconds(2);
digitalWrite(ULTRASONIC, HIGH);
delayMicroseconds(2);
digitalWrite(ULTRASONIC,LOW);
pinMode(ULTRASONIC,INPUT);
long duration;
duration = pulseIn(ULTRASONIC,HIGH);
long RangeIndist;
RangeIndist = duration;
return RangeIndist;
}



















{kind=link}
{kind=link}
{kind=link}
Comments