#include <ctype.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <BDK.h>
#include <CSN_LP_AO.h>
#include <BHI160_NDOF.h>
//-----------------------------------------------------------------------------
// DEFINES / CONSTANTS
//-----------------------------------------------------------------------------
#define CSN_AO_NODE_NAME "AO"
#define CSN_AO_AVAIL_BIT 0x00000010
#define CSN_AO_PROP_CNT 21
// Shortcut macros for logging of AO node messages.
#define CSN_AO_Error(...) CS_LogError("AO", __VA_ARGS__)
#define CSN_AO_Warn(...) CS_LogWarning("AO", __VA_ARGS__)
#define CSN_AO_Info(...) CS_LogInfo("AO", __VA_ARGS__)
#define CSN_AO_Verbose(...) CS_LogVerbose("AO", __VA_ARGS__)
//-----------------------------------------------------------------------------
// EXTERNAL / FORWARD DECLARATIONS
//-----------------------------------------------------------------------------
static void CSN_AO_SensorCallback(bhy_data_generic_t *data,
bhy_virtual_sensor_t sensor);
/** \brief Handler for CS requests provided in node structure. */
static int CSN_LP_AO_RequestHandler(const struct CS_Request_Struct* request,
char* response);
static int CSN_LP_AO_PowerModeHandler(enum CS_PowerMode mode);
static void CSN_LP_AO_PollHandler(void);
static void CSN_LP_AO_EnableVirtualSensor(enum BHI160_NDOF_Sensor sensor);
// Sensor Calibration Status
static int CSN_AO_C_PropHandler(char* response);
// Absolute Orientation Properties
static int CSN_AO_H_PropHandler(char* response);
static int CSN_AO_P_PropHandler(char* response);
static int CSN_AO_R_PropHandler(char* response);
// Accelerometer Gravity Vector Properties
static int CSN_AO_GX_PropHandler(char* response);
static int CSN_AO_GY_PropHandler(char* response);
static int CSN_AO_GZ_PropHandler(char* response);
// Accelerometer Linear Acceleration Vector Properties
static int CSN_AO_AX_PropHandler(char* response);
static int CSN_AO_AY_PropHandler(char* response);
static int CSN_AO_AZ_PropHandler(char* response);
// Magnetometer Magnetic Flux
static int CSN_AO_MX_PropHandler(char* response);
static int CSN_AO_MY_PropHandler(char* response);
static int CSN_AO_MZ_PropHandler(char* response);
// Gyroscope Angular Rotation
static int CSN_AO_ARX_PropHandler(char* response);
static int CSN_AO_ARY_PropHandler(char* response);
static int CSN_AO_ARZ_PropHandler(char* response);
// Composite Properties
static int CSN_AO_O_PropHandler(char* response);
static int CSN_AO_G_PropHandler(char* response);
static int CSN_AO_A_PropHandler(char* response);
static int CSN_AO_M_PropHandler(char* response);
static int CSN_AO_AR_PropHandler(char* response);
int steps = 0;
//-----------------------------------------------------------------------------
// INTERNAL VARIABLES
//-----------------------------------------------------------------------------
/** \brief CS node structure passed to CS. */
static struct CS_Node_Struct ao_node = {
CSN_AO_NODE_NAME,
CSN_AO_AVAIL_BIT,
&CSN_LP_AO_RequestHandler,
&CSN_LP_AO_PowerModeHandler,
&CSN_LP_AO_PollHandler
};
struct CSN_AO_Property_Struct
{
const char* name;
const char* prop_def;
int (*callback)(char* response);
enum BHI160_NDOF_Sensor required_sensor;
};
static const struct CSN_AO_Property_Struct ao_prop[CSN_AO_PROP_CNT] = {
{ "C", "p/R/h/CAL", &CSN_AO_C_PropHandler, 0 },
{ "O", "p/R/c/O", &CSN_AO_O_PropHandler, BHI160_NDOF_S_ORIENTATION },
{ "G", "p/R/c/G", &CSN_AO_G_PropHandler, BHI160_NDOF_S_GRAVITY },
{ "A", "p/R/c/A", &CSN_AO_A_PropHandler, BHI160_NDOF_S_LINEAR_ACCELERATION },
{ "M", "p/R/c/M", &CSN_AO_M_PropHandler, BHI160_NDOF_S_MAGNETIC_FIELD },
{ "AR", "p/R/c/AR", &CSN_AO_AR_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "H", "p/R/f/H", &CSN_AO_H_PropHandler, BHI160_NDOF_S_ORIENTATION },
{ "P", "p/R/f/P", &CSN_AO_P_PropHandler, BHI160_NDOF_S_ORIENTATION },
{ "R", "p/R/f/R", &CSN_AO_R_PropHandler, BHI160_NDOF_S_ORIENTATION },
{ "GX", "p/R/f/GX", &CSN_AO_GX_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "GY", "p/R/f/GY", &CSN_AO_GY_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "GZ", "p/R/f/GZ", &CSN_AO_GZ_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "AX", "p/R/f/AX", &CSN_AO_AX_PropHandler, BHI160_NDOF_S_LINEAR_ACCELERATION },
{ "AY", "p/R/f/AY", &CSN_AO_AY_PropHandler, BHI160_NDOF_S_LINEAR_ACCELERATION },
{ "AZ", "p/R/f/AZ", &CSN_AO_AZ_PropHandler, BHI160_NDOF_S_LINEAR_ACCELERATION },
{ "MX", "p/R/f/MX", &CSN_AO_MX_PropHandler, BHI160_NDOF_S_MAGNETIC_FIELD },
{ "MY", "p/R/f/MY", &CSN_AO_MY_PropHandler, BHI160_NDOF_S_MAGNETIC_FIELD },
{ "MZ", "p/R/f/MZ", &CSN_AO_MZ_PropHandler, BHI160_NDOF_S_MAGNETIC_FIELD },
{ "ARX", "p/R/f/ARX", &CSN_AO_ARX_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "ARY", "p/R/f/ARY", &CSN_AO_ARY_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION },
{ "ARZ", "p/R/f/ARZ", &CSN_AO_ARZ_PropHandler, BHI160_NDOF_S_RATE_OF_ROTATION }
};
static bhy_data_vector_t orientation = { 0 };
static bhy_data_vector_t gravity = { 0 };
static bhy_data_vector_t lin_accel = { 0 };
static bhy_data_vector_t rate_of_rotation = { 0 };
static bhy_data_vector_t magnetic_field = { 0 };
static uint32_t ao_enabled_sensors = 0;
//-----------------------------------------------------------------------------
// FUNCTION DEFINITIONS
//-----------------------------------------------------------------------------
struct CS_Node_Struct* CSN_LP_AO_Create(void)
{
int32_t errcode = 0;
errcode = BHI160_NDOF_Initialize();
if (errcode == BHY_SUCCESS)
{
errcode = bhy_install_sensor_callback(BHI160_NDOF_S_GRAVITY,
VS_WAKEUP, CSN_AO_SensorCallback);
errcode += bhy_install_sensor_callback(BHI160_NDOF_S_LINEAR_ACCELERATION,
VS_WAKEUP, CSN_AO_SensorCallback);
errcode += bhy_install_sensor_callback(BHI160_NDOF_S_MAGNETIC_FIELD,
VS_WAKEUP, CSN_AO_SensorCallback);
errcode += bhy_install_sensor_callback(BHI160_NDOF_S_ORIENTATION,
VS_WAKEUP, CSN_AO_SensorCallback);
errcode += bhy_install_sensor_callback(BHI160_NDOF_S_RATE_OF_ROTATION,
VS_WAKEUP, CSN_AO_SensorCallback);
if (errcode == BHY_SUCCESS)
{
return &ao_node;
}
else
{
CSN_AO_Error("Failed to install sensor callbacks.");
}
}
else
{
CSN_AO_Error("Failed to initialize BHI160. (err=%d)", errcode);
}
// Error occurred.
return NULL;
}
static void CSN_AO_SensorCallback(bhy_data_generic_t *data,
bhy_virtual_sensor_t sensor)
{
switch ((int) sensor)
{
case VS_ID_GRAVITY:
case VS_ID_GRAVITY_WAKEUP:
memcpy(&gravity, &data->data_vector, sizeof(bhy_data_vector_t));
break;
case VS_ID_LINEAR_ACCELERATION:
case VS_ID_LINEAR_ACCELERATION_WAKEUP:
memcpy(&lin_accel, &data->data_vector, sizeof(bhy_data_vector_t));
break;
case VS_ID_MAGNETOMETER:
case VS_ID_MAGNETOMETER_WAKEUP:
memcpy(&magnetic_field, &data->data_vector, sizeof(bhy_data_vector_t));
break;
case VS_ID_ORIENTATION:
case VS_ID_ORIENTATION_WAKEUP:
memcpy(&orientation, &data->data_vector, sizeof(bhy_data_vector_t));
break;
case VS_ID_GYROSCOPE:
case VS_ID_GYROSCOPE_WAKEUP:
memcpy(&rate_of_rotation, &data->data_vector, sizeof(bhy_data_vector_t));
break;
default:
CSN_AO_Warn("Unknown virtual sensor type: %d", sensor);
break;
}
}
static int CSN_LP_AO_RequestHandler(const struct CS_Request_Struct* request,
char* response)
{
// Check request type
if (request->property_value != NULL)
{
CSN_AO_Error("AO properties support only read requests.");
sprintf(response, "e/ACCESS");
return CS_OK;
}
// AO Data property requests
for (int i = 0; i < CSN_AO_PROP_CNT; ++i)
{
if (strcmp(request->property, ao_prop[i].name) == 0)
{
// Wake up the sensor chip
CSN_LP_AO_PowerModeHandler(CS_POWER_MODE_NORMAL);
// Enable respective virtual sensor
CSN_LP_AO_EnableVirtualSensor(ao_prop[i].required_sensor);
// Fill response with latest data
if (ao_prop[i].callback(response) != CS_OK)
{
sprintf(response, "e/NODE_ERR");
}
return CS_OK;
}
}
// PROP property request
if (strcmp(request->property, "PROP") == 0)
{
sprintf(response, "i/%d", CSN_AO_PROP_CNT);
return CS_OK;
}
// NODEx property request
if (strlen(request->property) > 4
&& memcmp(request->property, "PROP", 4) == 0)
{
// check if there are only digits after first 4 characters
char* c = (char*) &request->property[4];
int valid_number = 1;
while (*c != '\0')
{
if (isdigit(*c) == 0)
{
valid_number = 0;
break;
}
++c;
}
if (valid_number == 1)
{
int prop_index = atoi(&request->property[4]);
if (prop_index >= 0 && prop_index < CSN_AO_PROP_CNT)
{
sprintf(response, "n/%s", ao_prop[prop_index].prop_def);
return CS_OK;
}
else
{
CSN_AO_Error("Out of bound NODEx request.");
// Invalid property error
}
}
else
{
// Invalid property error
}
}
CSN_AO_Error("AO property '%s' does not exist.", request->property);
sprintf(response, "e/UNK_PROP");
return CS_OK;
}
static int CSN_LP_AO_PowerModeHandler(enum CS_PowerMode mode)
{
static bool is_suspended = true;
int32_t errcode = BHY_SUCCESS;
switch (mode)
{
case CS_POWER_MODE_NORMAL:
if (is_suspended)
{
errcode = BHI160_NDOF_SetPowerMode(BHI160_NDOF_PM_NORMAL);
if (errcode != BHY_SUCCESS)
{
return CS_ERROR;
}
is_suspended = false;
CSN_AO_Info("Entered NORMAL power mode.");
}
break;
case CS_POWER_MODE_SLEEP:
// Disable all virtual sensors
errcode = bhy_disable_virtual_sensor(BHI160_NDOF_S_GRAVITY, VS_WAKEUP);
errcode += bhy_disable_virtual_sensor(BHI160_NDOF_S_LINEAR_ACCELERATION, VS_WAKEUP);
errcode += bhy_disable_virtual_sensor(BHI160_NDOF_S_MAGNETIC_FIELD, VS_WAKEUP);
errcode += bhy_disable_virtual_sensor(BHI160_NDOF_S_ORIENTATION, VS_WAKEUP);
errcode += bhy_disable_virtual_sensor(BHI160_NDOF_S_RATE_OF_ROTATION, VS_WAKEUP);
ao_enabled_sensors = 0;
if (errcode != BHY_SUCCESS)
{
return CS_ERROR;
}
// Put chip into standby mode
is_suspended = true;
errcode = BHI160_NDOF_SetPowerMode(BHI160_NDOF_PM_STANDBY);
if (errcode != BHY_SUCCESS)
{
return CS_ERROR;
}
// Reset all sensor data.
memset(&orientation, 0, sizeof(orientation));
memset(&gravity, 0, sizeof(gravity));
memset(&lin_accel, 0, sizeof(lin_accel));
memset(&rate_of_rotation, 0, sizeof(rate_of_rotation));
memset(&magnetic_field, 0, sizeof(magnetic_field));
CSN_AO_Info("Entered STANDBY power mode.");
break;
}
return CS_OK;
}
static void CSN_LP_AO_PollHandler(void)
{
}
static void CSN_LP_AO_EnableVirtualSensor(enum BHI160_NDOF_Sensor sensor)
{
int32_t errcode;
if ((ao_enabled_sensors & (1 << sensor)) == 0)
{
errcode = bhy_enable_virtual_sensor(sensor, VS_WAKEUP,
CSN_LP_AO_SAMPLE_RATE, 0, VS_FLUSH_NONE, 0, 0);
if (errcode != BHY_SUCCESS)
{
CSN_AO_Error("Failed to enable virtual sensor %d (err=%d)", sensor,
errcode);
}
else
{
CSN_AO_Verbose("Enabled virtual sensor: %d", sensor);
}
// sensor IDs range from 1 up to 31
ao_enabled_sensors |= (1 << sensor);
}
}
static int CSN_AO_C_PropHandler(char* response)
{
sprintf(response, "h/%X%X%X%X", 0, gravity.status, rate_of_rotation.status,
magnetic_field.status);
return CS_OK;
}
static int CSN_AO_O_PropHandler(char* response)
{
snprintf(response, 19, "%d,%d,%d",
(int) (orientation.x / 32768.0f * 360.0f * 10.0f),
(int) (orientation.y / 32768.0f * 360.0f * 10.0f),
(int) (orientation.z / 32768.0f * 360.0f * 10.0f));
return CS_OK;
}
static int CSN_AO_G_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "%d,%d,%d",
(int) (gravity.x / 32768.0f * dyn_range * 9.80665f * 100.0f),
(int) (gravity.y / 32768.0f * dyn_range * 9.80665f * 100.0f),
(int) (gravity.z / 32768.0f * dyn_range * 9.80665f * 100.0f));
return CS_OK;
}
static int CSN_AO_A_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
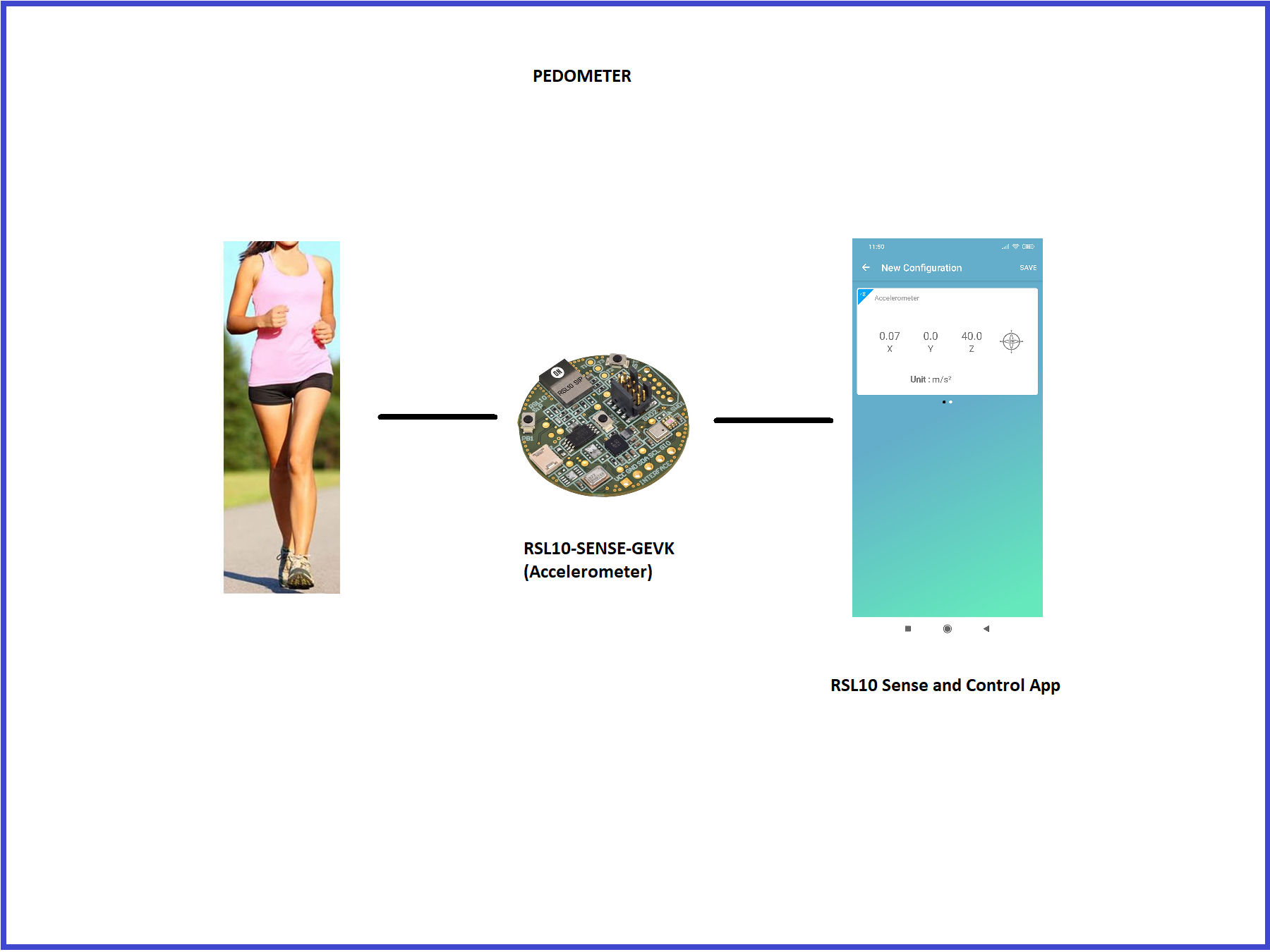
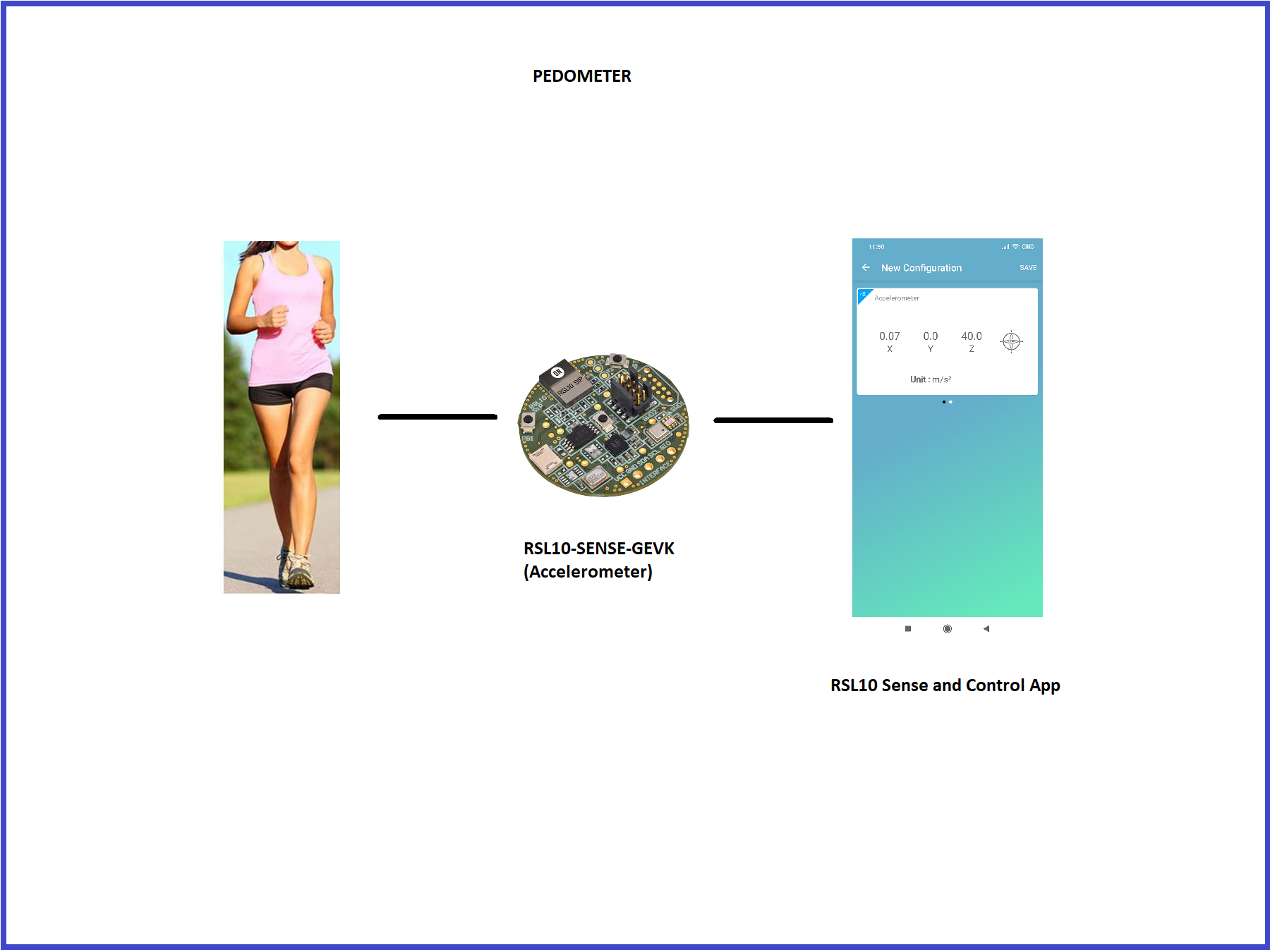
// PEDOMETER CALCULATIONS
if (((fabsf(lin_accel.x / 32768.0f * dyn_range * 9.80665f * 100.0f)) + (fabsf(lin_accel.y / 32768.0f * dyn_range * 9.80665f * 100.0f)) + (fabsf(lin_accel.z / 32768.0f * dyn_range * 9.80665f * 100.0f))) >= 25.00f ) // pedometer
{
steps = steps + 1;
}
else
{
steps = steps + 0;
}
snprintf(response, 19, "%d,%d,%d",
(int) (lin_accel.x / 32768.0f * dyn_range * 9.80665f * 100.0f),
(int) (lin_accel.y / 32768.0f * dyn_range * 9.80665f * 100.0f),
//(int) (lin_accel.z / 32768.0f * dyn_range * 9.80665f * 100.0f));
(int) (steps*100.0f));
return CS_OK;
}
static int CSN_AO_M_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetMagDynamicRange();
snprintf(response, 19, "%d,%d,%d",
(int) (magnetic_field.x / 32768.0f * dyn_range * 10.0f),
(int) (magnetic_field.y / 32768.0f * dyn_range * 10.0f),
(int) (magnetic_field.z / 32768.0f * dyn_range * 10.0f));
return CS_OK;
}
static int CSN_AO_AR_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetGyroDynamicRange();
snprintf(response, 19, "%d,%d,%d",
(int) (rate_of_rotation.x / 32768.0f * dyn_range * 10.0f),
(int) (rate_of_rotation.y / 32768.0f * dyn_range * 10.0f),
(int) (rate_of_rotation.z / 32768.0f * dyn_range * 10.0f));
return CS_OK;
}
static int CSN_AO_H_PropHandler(char* response)
{
snprintf(response, 19, "f/%f", orientation.x / 32768.0f * 360.0f);
return CS_OK;
}
static int CSN_AO_P_PropHandler(char* response)
{
snprintf(response, 19, "f/%f", orientation.y / 32768.0f * 360.0f);
return CS_OK;
}
static int CSN_AO_R_PropHandler(char* response)
{
snprintf(response, 19, "f/%f", orientation.z / 32768.0f * 360.0f);
return CS_OK;
}
static int CSN_AO_GX_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "f/%f", gravity.x / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_GY_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "f/%f", gravity.y / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_GZ_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "f/%f", gravity.z / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_AX_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "f/%f", lin_accel.x / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_AY_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
snprintf(response, 19, "f/%f", lin_accel.y / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_AZ_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetAccelDynamicRange();
int steps = 0;
snprintf(response, 19, "f/%f", lin_accel.z / 32768.0f * 9.80665f * dyn_range);
return CS_OK;
}
static int CSN_AO_MX_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetMagDynamicRange();
snprintf(response, 19, "f/%f", magnetic_field.x / 32768.0f * dyn_range);
return CS_OK;
}
static int CSN_AO_MY_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetMagDynamicRange();
snprintf(response, 19, "f/%f", magnetic_field.y / 32768.0f * dyn_range);
return CS_OK;
}
static int CSN_AO_MZ_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetMagDynamicRange();
snprintf(response, 19, "f/%f", magnetic_field.z / 32768.0f * dyn_range);
return CS_OK;
}
static int CSN_AO_ARX_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetGyroDynamicRange();
snprintf(response, 19, "f/%f", rate_of_rotation.x / 32768.0f * dyn_range);
return CS_OK;
}
static int CSN_AO_ARY_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetGyroDynamicRange();
snprintf(response, 19, "f/%f", rate_of_rotation.y / 32768.0f * dyn_range);
return CS_OK;
}
static int CSN_AO_ARZ_PropHandler(char* response)
{
const uint16_t dyn_range = BHI160_NDOF_GetGyroDynamicRange();
snprintf(response, 19, "f/%f", rate_of_rotation.z / 32768.0f * dyn_range);
return CS_OK;
}




{kind=link}

Comments