Every college student knows the immense pain of getting out of bed in the morning. It is immensely grueling to pull oneself out of sleep willingly. We aim to combat loss of productiveness due to snoozing, and the disabling alarms with this product. Group 22 has introduced a new advanced alarm system so that you can't fall back asleep, and you can hold yourself accountable for your morning habits.
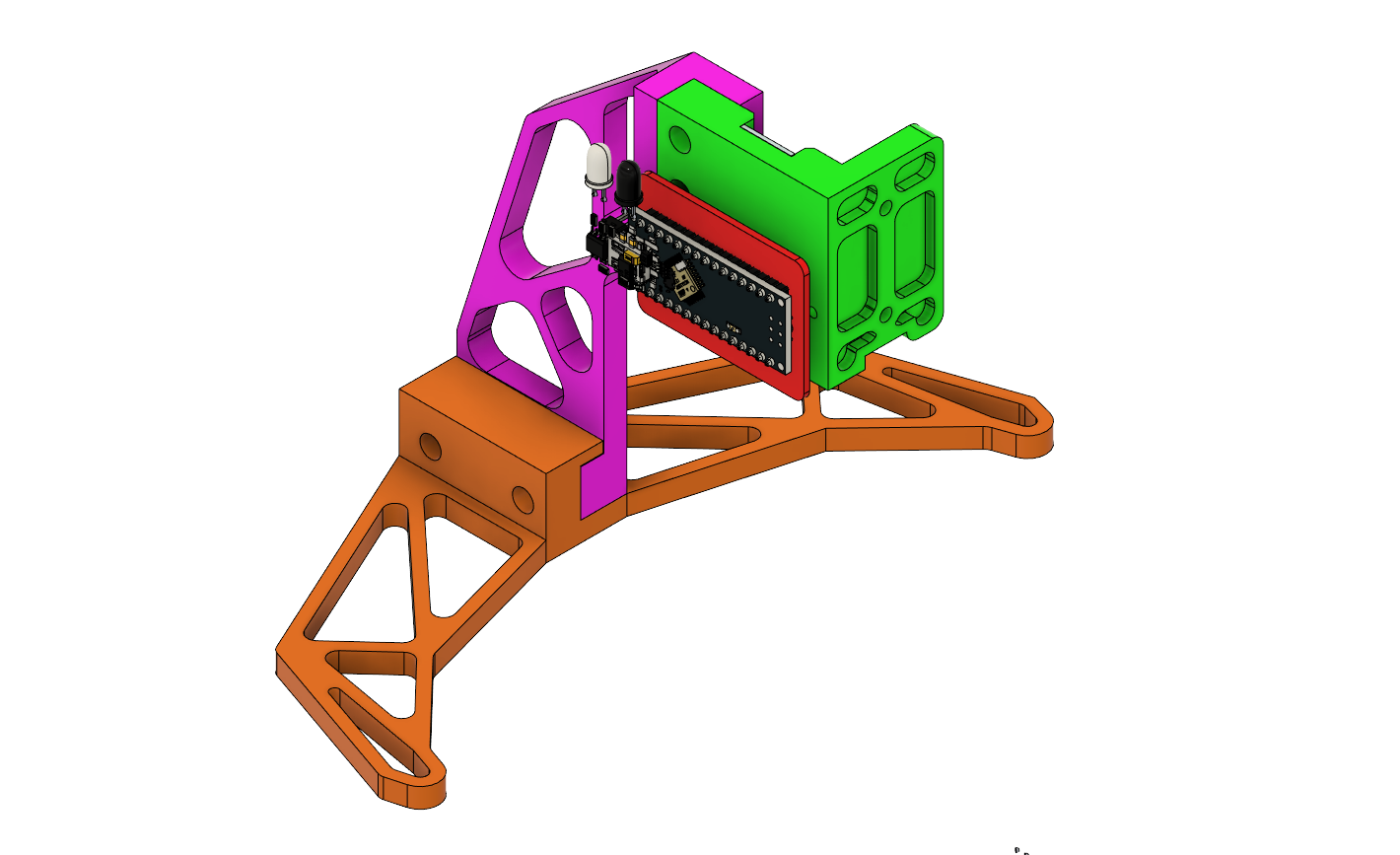
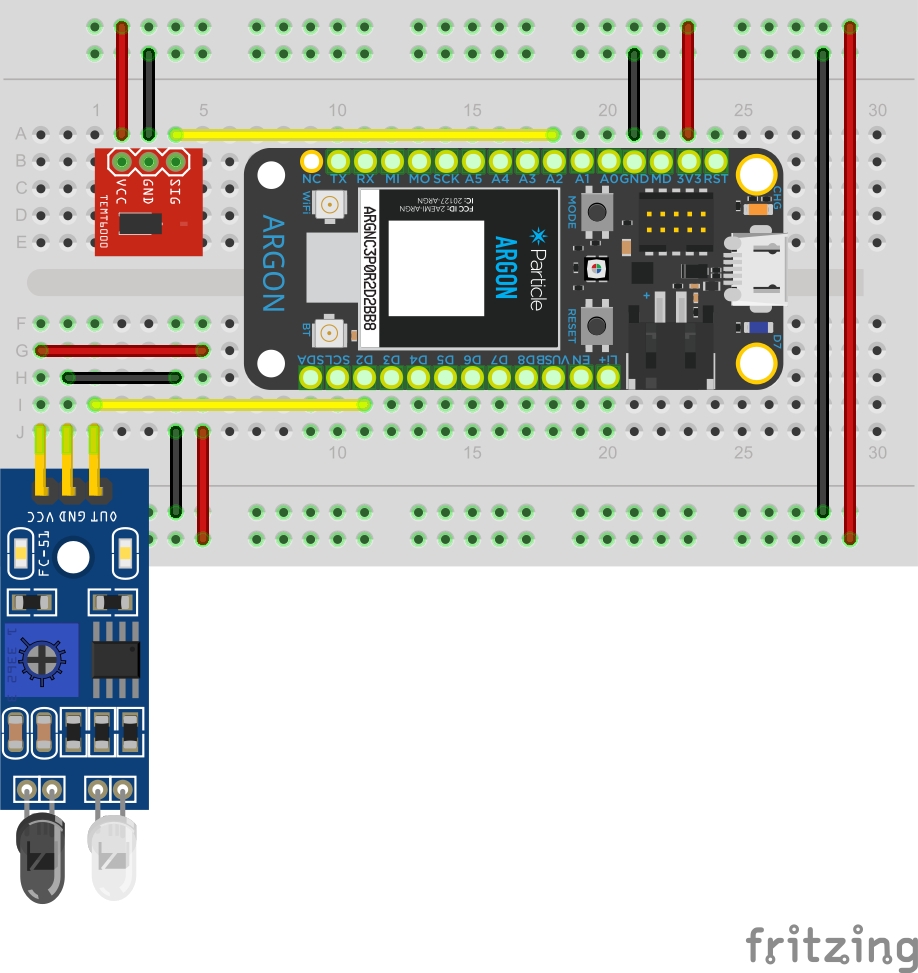
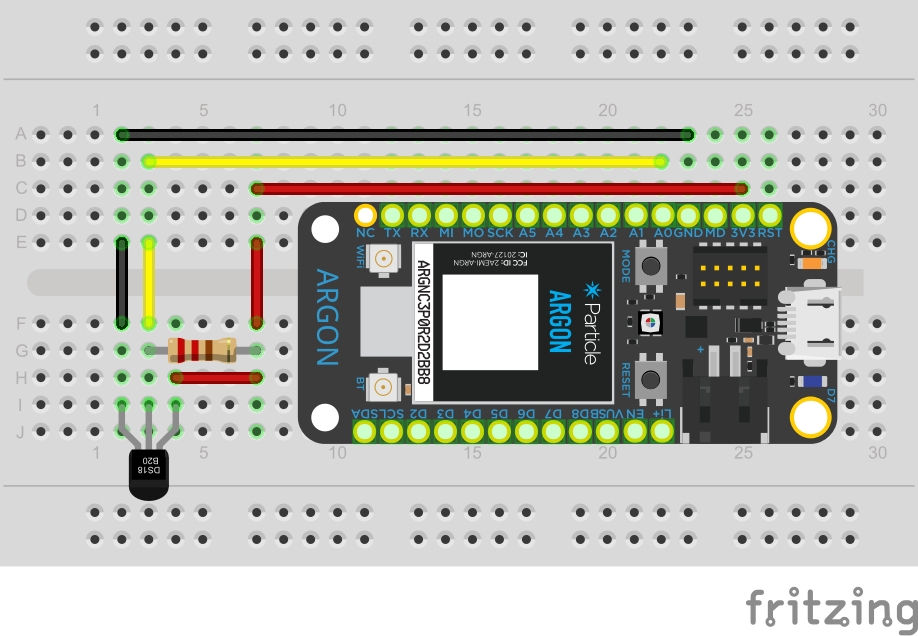
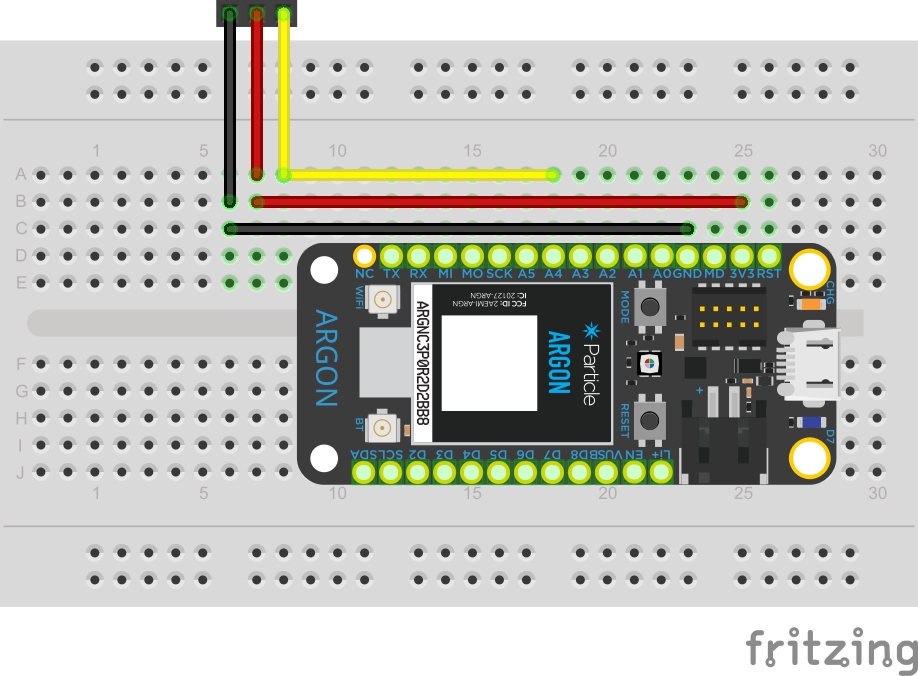
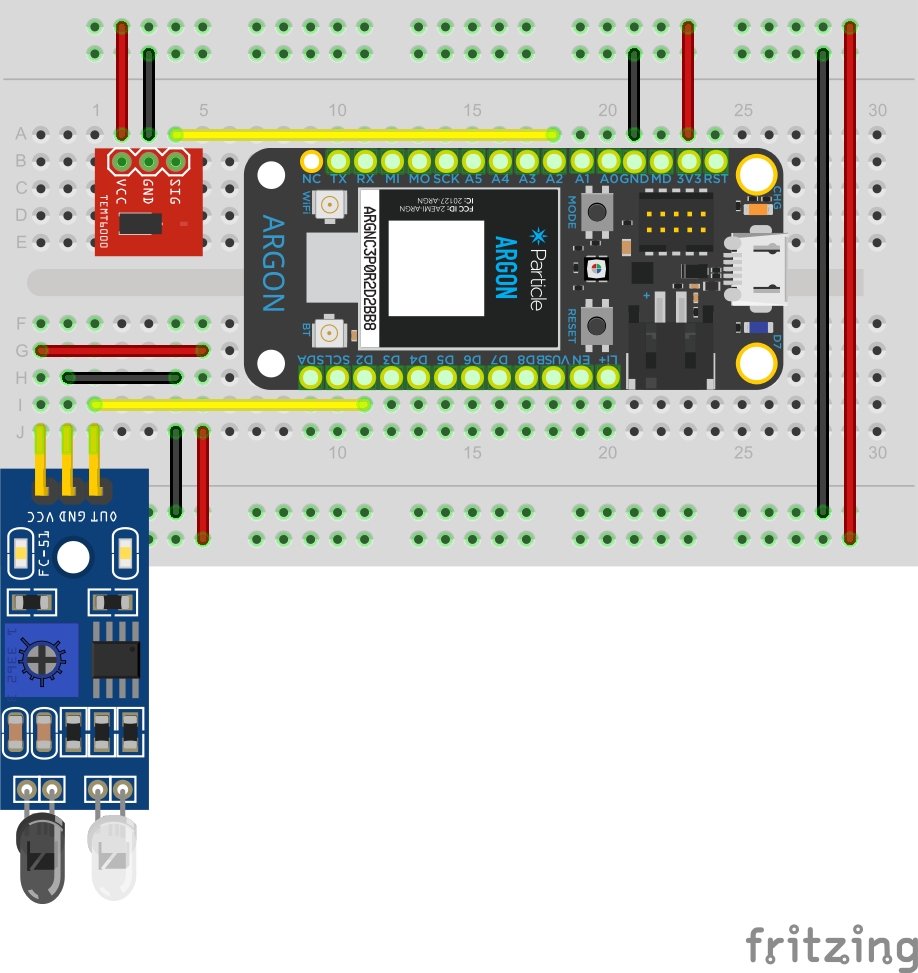
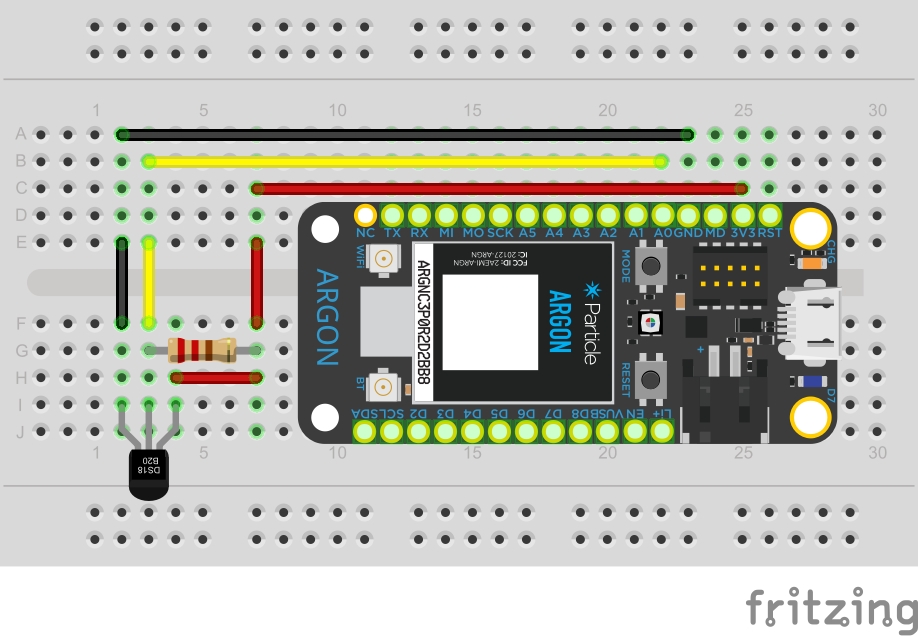
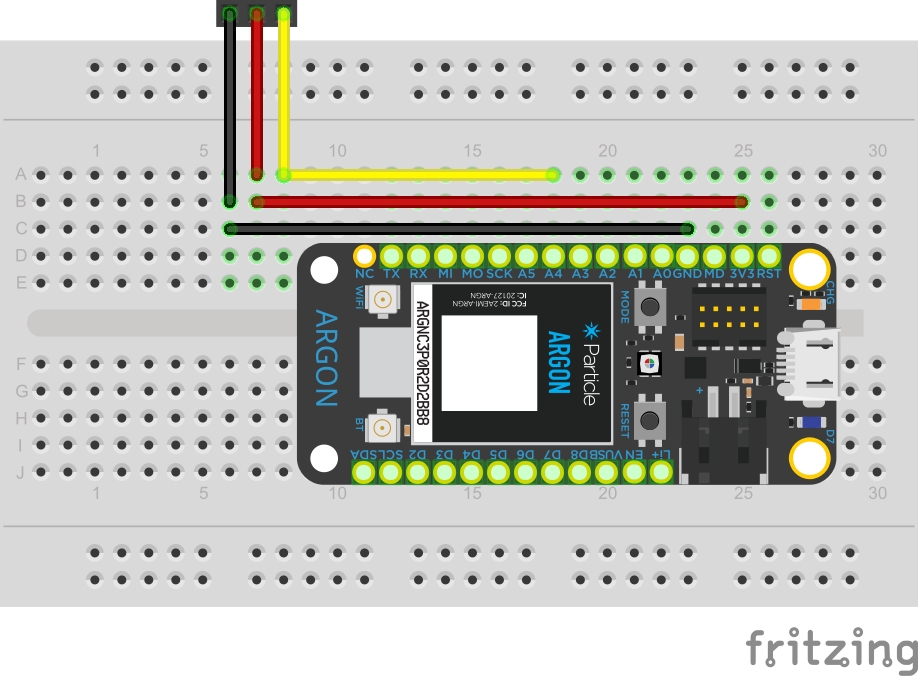
The system incorporates logic that turns on an overhead light when your normal phone alarm goes off. A photo-resistor mounted to a stand placed on the users' night stand detects the light of the cell phone when the alarm goes off and activates a servo motor mounted to the light switch of the users' bedroom. This ensures that the user will be forced to react and hopefully commit to getting out of bed. Additionally, a temperature sensor placed outside the bedroom window will read the temperature and humidity for the day to better prepare the user for the day ahead. Lastly, an IR sensor is incorporated to turn off the system with a wave of the hand. The system can be turned off manually or using the IR sensor 1 minute after the system is turned on by the photoresistor. This ensures that the system is not immediately snoozed by the user and forces them to get up.
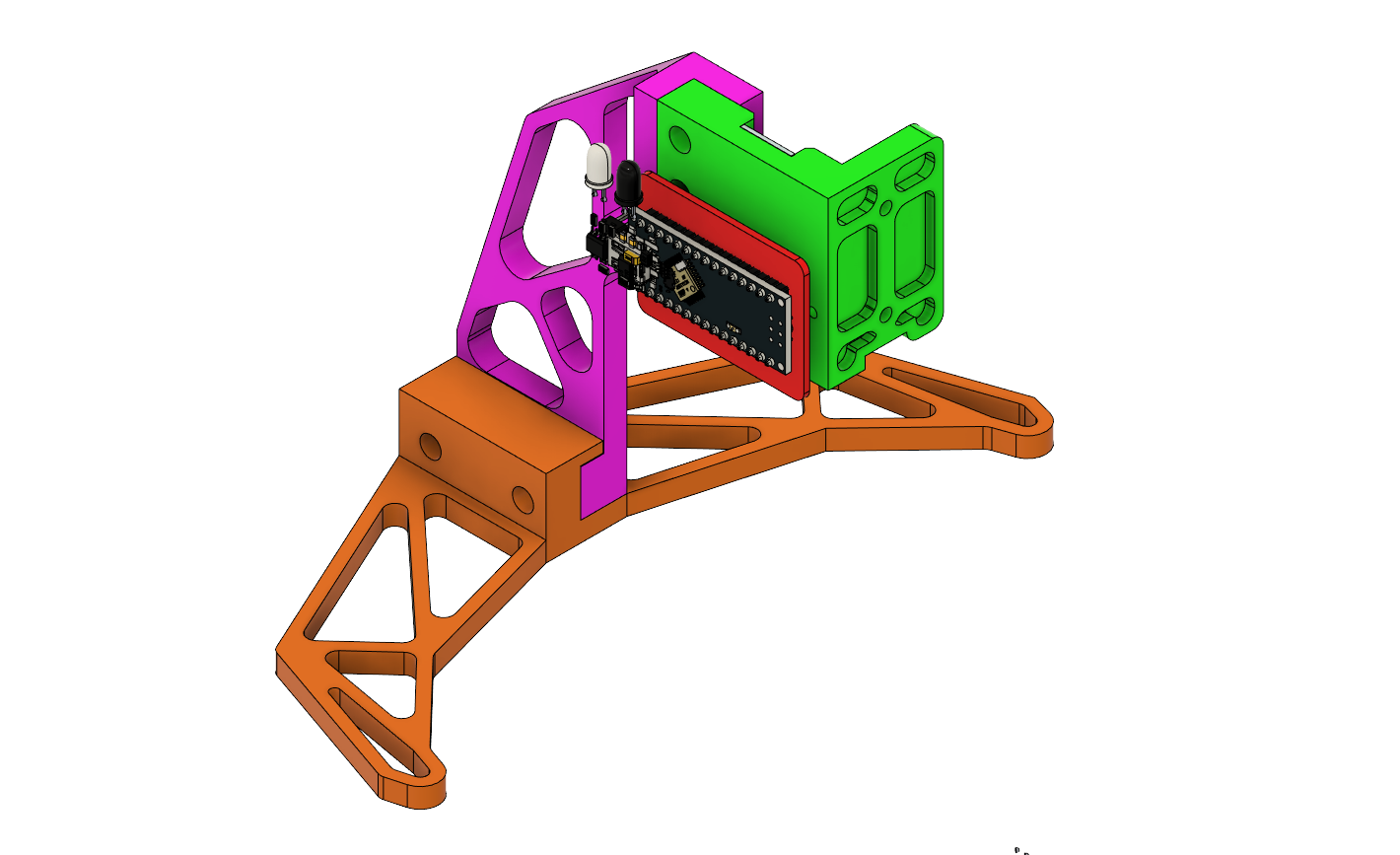
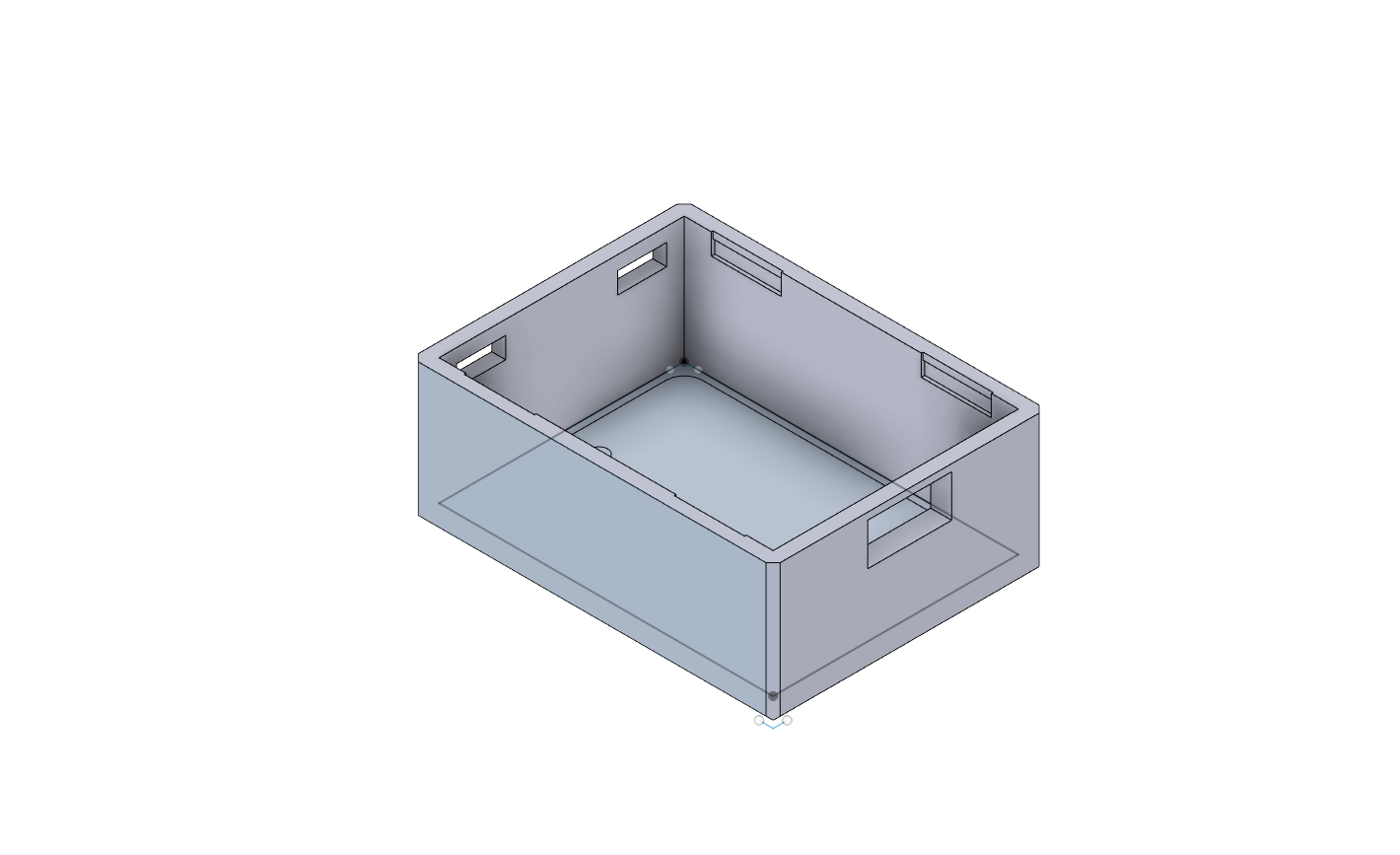
Project Stand with IR Sensor Facing Up and Photo Resistor Pointed at Desk
Our improved alarm system aims to inconvenience the user to ensure a productive day.
Logic Diagram of Project System























_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments