


Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
Done By: Gracia Han, Teh Shun Yuan, Joycelyn Wong, Xavier LeongDescription:
Read moreThis project focuses on improving worker safety near conveyor belts commonly used in logistics and warehouses. Using M5Stack components, the system monitors worker proximity, detects motion, and activates barriers to prevent accidents. Visual and auditory alerts signal danger zones, while optional environmental monitoring addresses conditions like humidity and dust.Our Aim:
- Design a sustainable technology solution to enhance workers' safety in logistics and warehousing environments using smart factory principles.
- Reduces workplace hazards, operational downtime, and costs associated with injuries and repairs, creating a safer and more efficient work environment.
Warehouses and logistics centers heavily depend on conveyor belts for efficient operations. However, worker safety remains a significant challenge, with risks including:
- High Rate of Conveyor Belt Injuries - Accidents can result in worker harm and financial losses.
- Reactive Safety Measures - Existing solutions only respond to incidents, rather than preventing them.
- Human Error & Monitoring Limitations - Manual oversight is inconsistent and inefficient.
- Compliance with Safety Regulations - Companies must adopt modern safety technologies to meet standards.
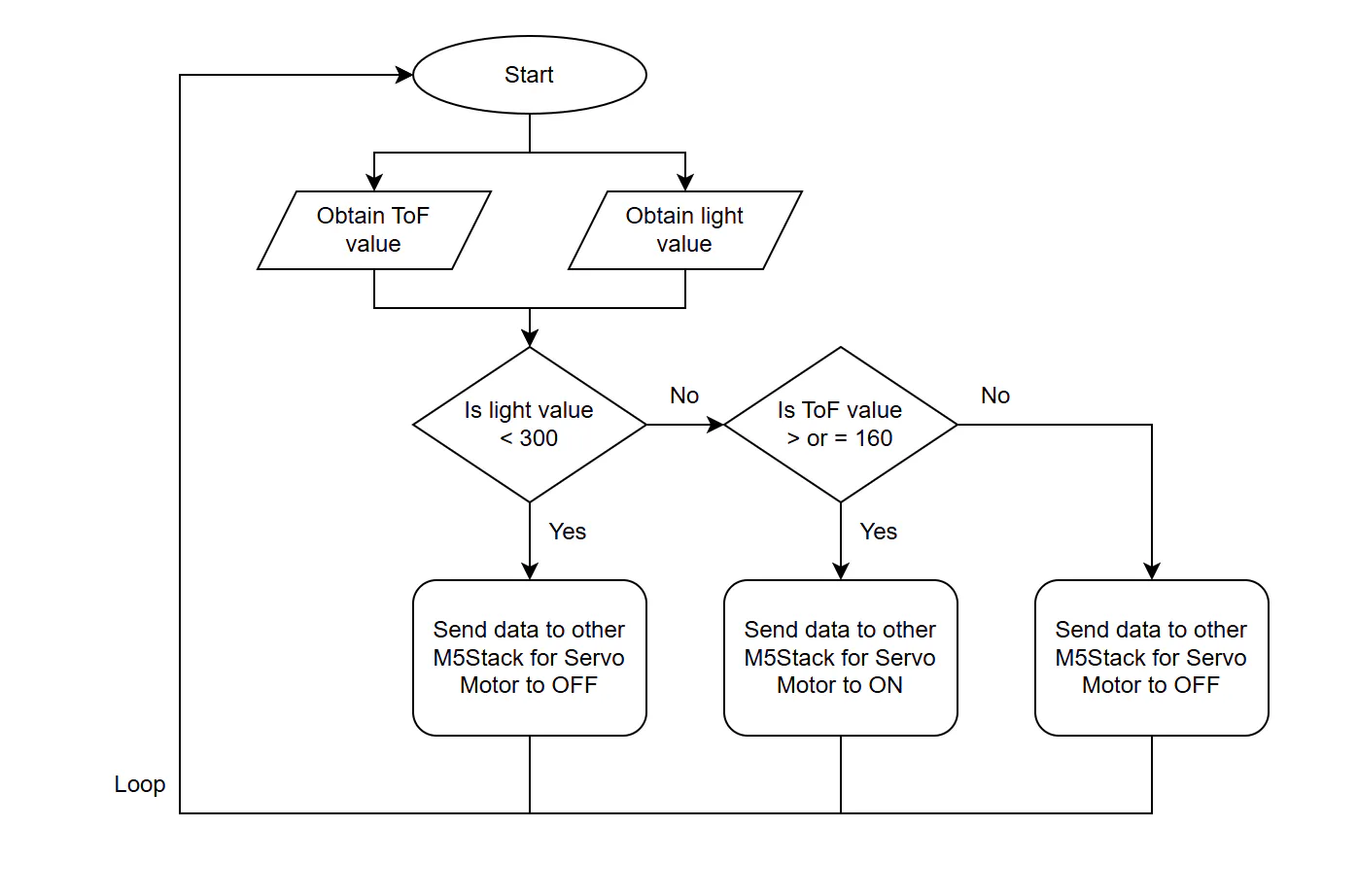
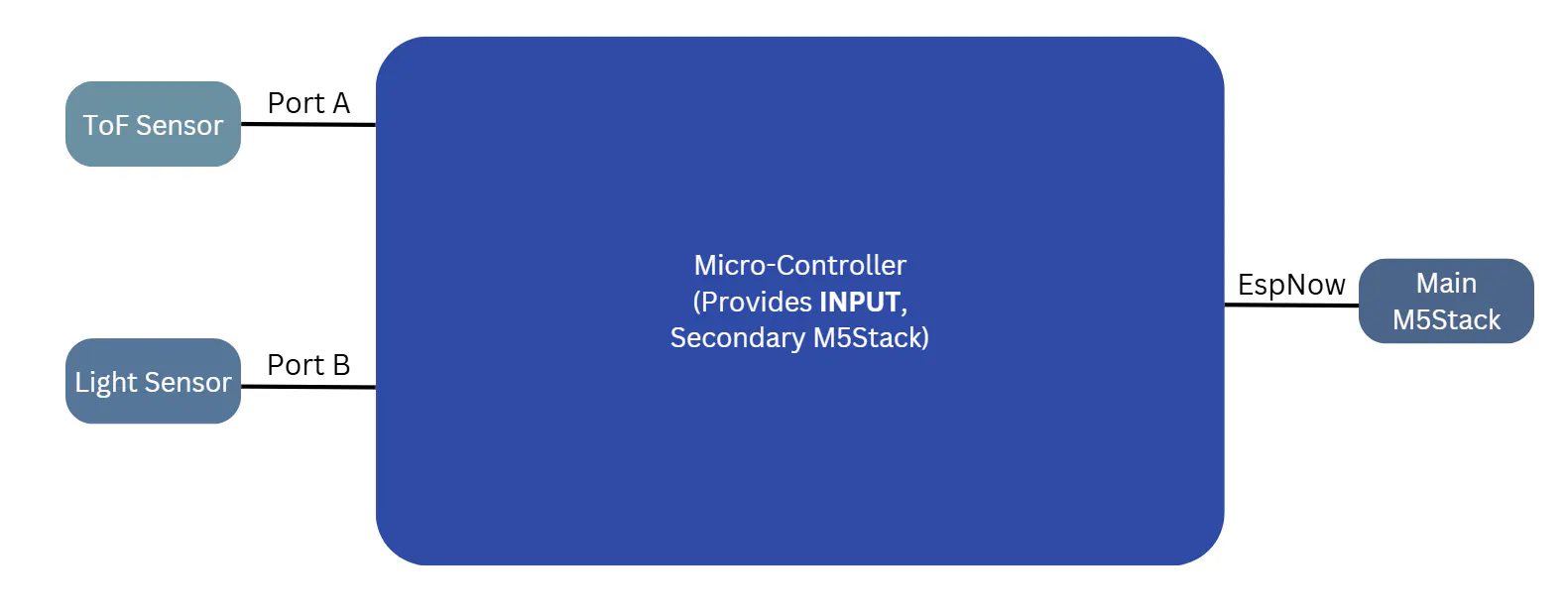
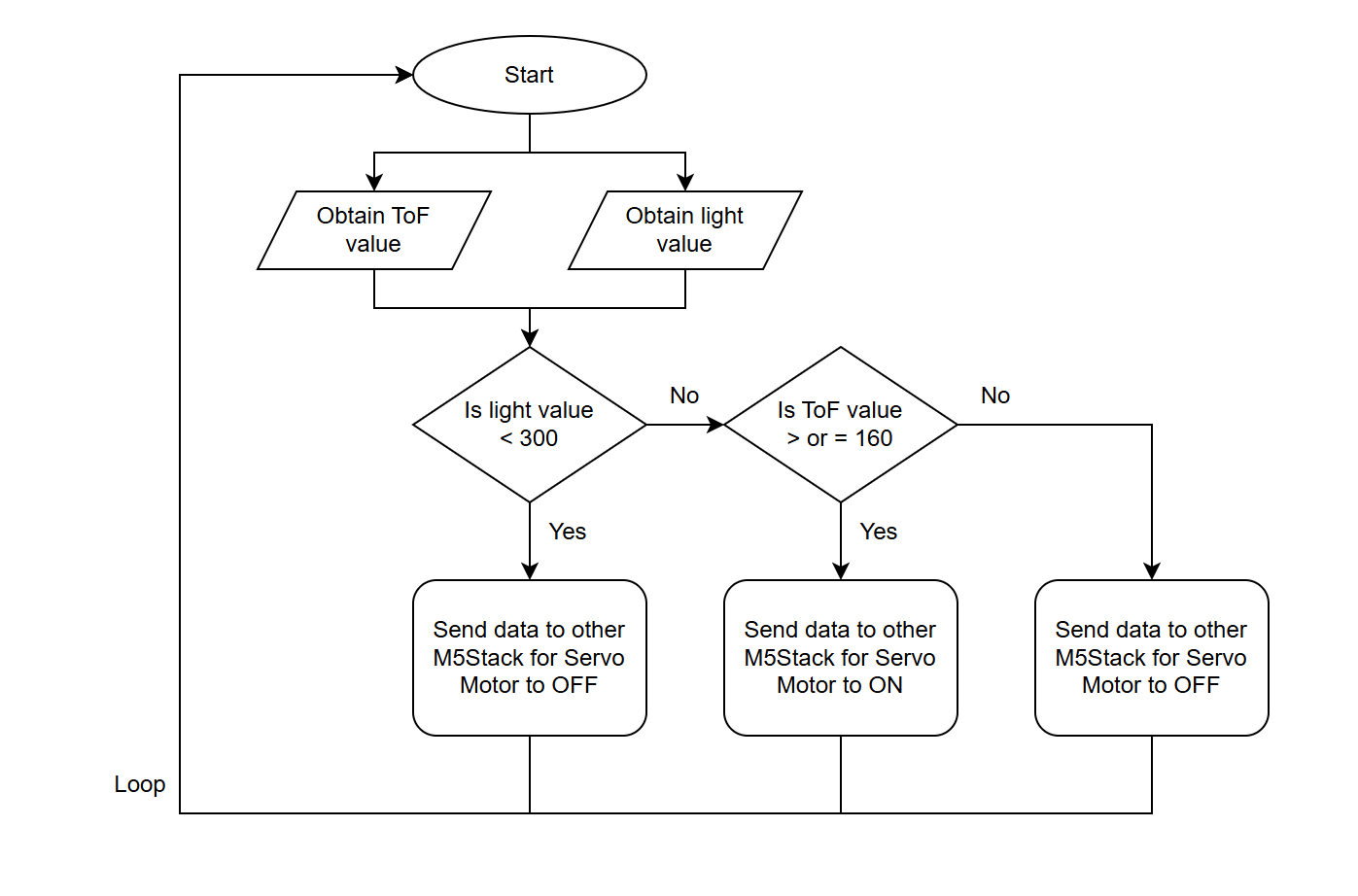
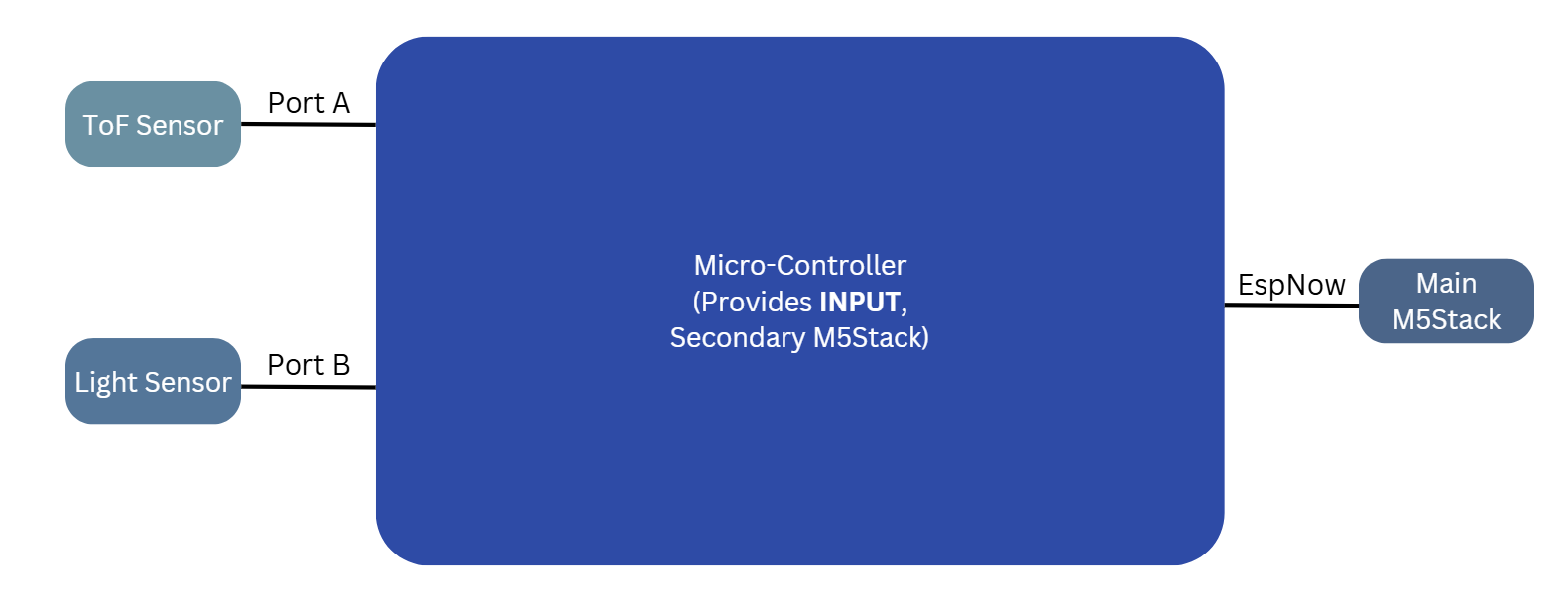
- Presence Sensor - Using a TOF Sensor, it could detect if any workers got too close to the conveyor belt.
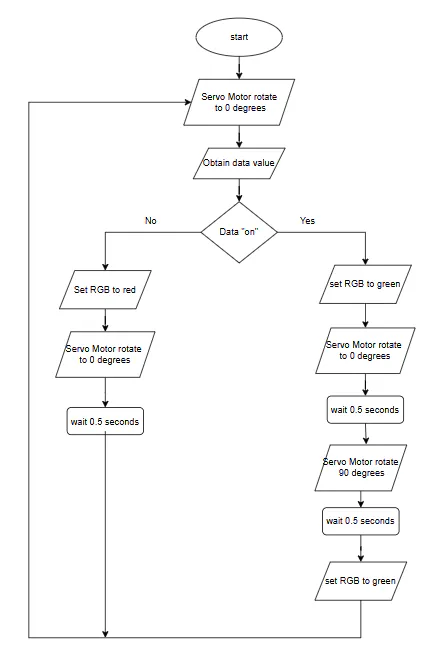
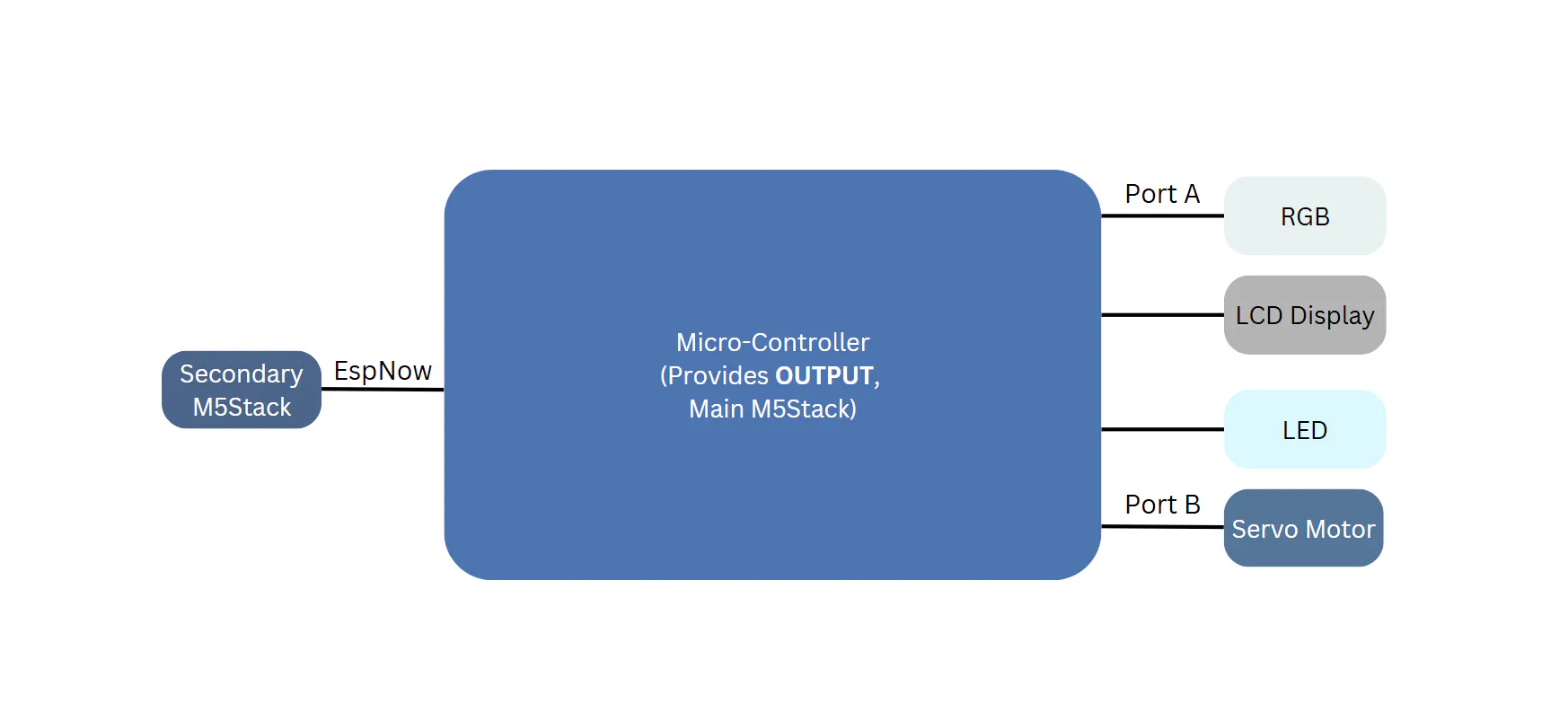
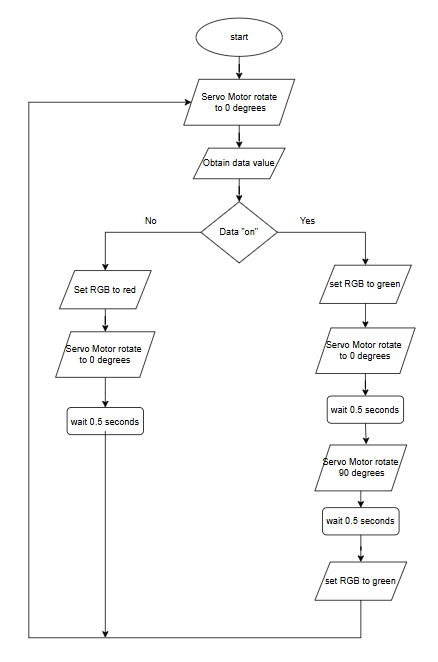
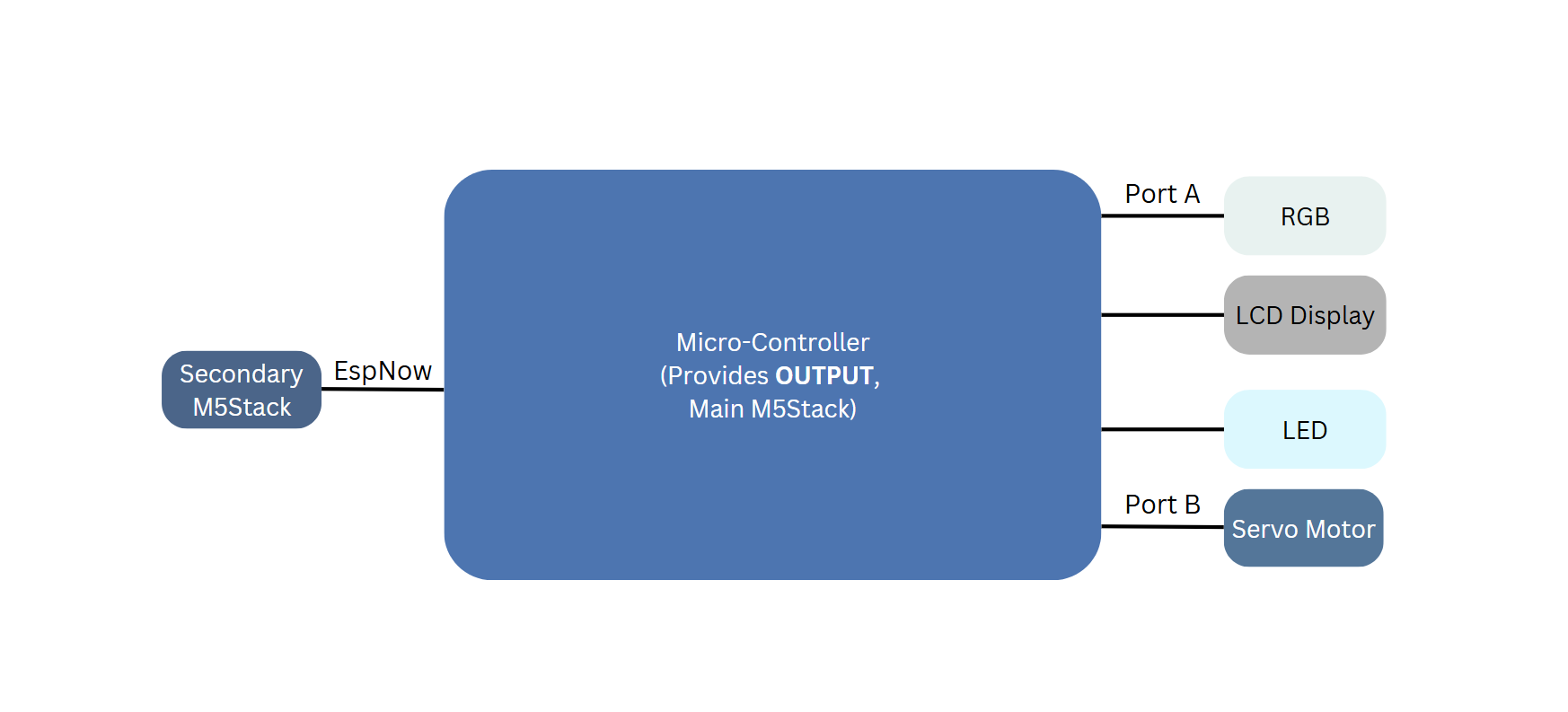
- Servo Motor - Using a Servo Motor, it can deploy safety measures to prevent workers from getting injured.
- Environment Checker - By using a Light Sensor, it helps to check if the environment is safe for workers.
- Warning System - Using RGB LED, it remains green if workers are keeping a safe distance away from the conveyor belt but turns red if they get too close.
Link to our Slides: E1_Group1.pptx
Prototype Pictures:Conveyor belt is running, LED is green
Conveyor belt stopped running because of object detected in front of the sensor(s), LED turns red
{kind=link}
{kind=link}
{kind=link}
{kind=link}




Comments