




Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 3 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 13 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
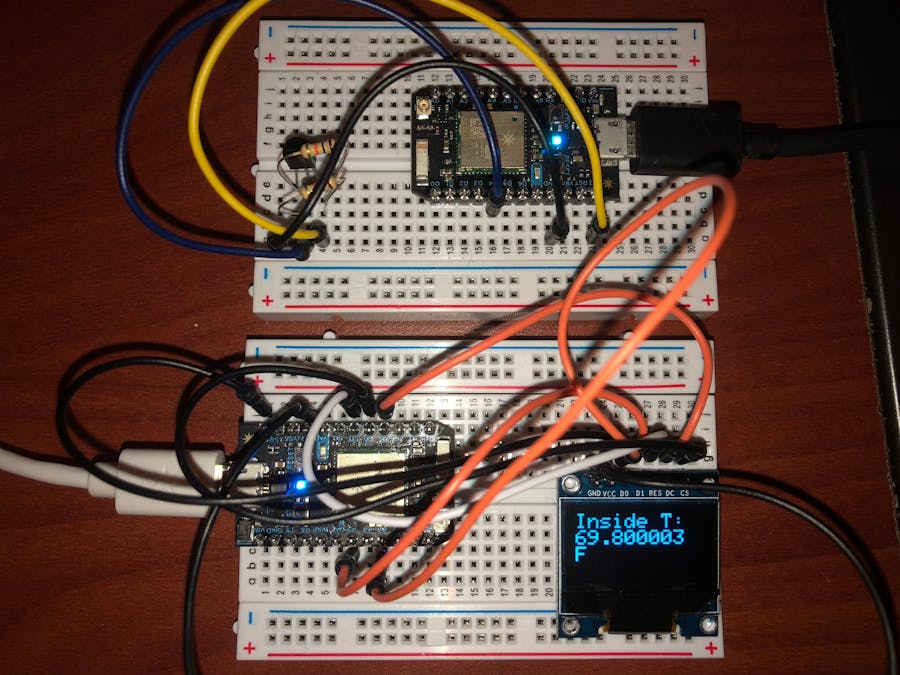
It it is very useful to not only know the temperature outdoors, but also indoors. Utilizing particle photon technology, we created a system that records temperatures inside and outside and relays them to a display screen. Through the use of IFTTT ("If This Then That"), data taken by the two temperature sensors is recorded in Google Sheets, which is also graphed to be shown as a function of time. The outdoor temperature sensor is a waterproof mechanism and was placed out the window to collect data at 1 to 5 minute updates, while the indoor sensor was a DS 18B20 sensor that remained indoors and collected data similarly. Each temperature sensor is connected to its own photon and records its own data. From there, both of these data sets are projected onto the OLED AdaFruit display screen which is run by a third photon. This photon flips back and forth between displaying these two temperatures. The photon system would be greatly useful for tracking changing temperatures over a period of time and/or for being updated with the weather outside and inside. The video linked below shows you a little more about our project and how it functions, so feel free to learn more!



{kind=link}
{kind=link}
{kind=link}
// This #include statement was automatically added by the Particle IDE.
#include <Adafruit_SSD1306.h>
/*********************************************************************
This is an example for our Monochrome OLEDs based on SSD1306 drivers
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/category/63_98
This example is for a 128x64 size display using SPI to communicate
4 or 5 pins are required to interface
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, check license.txt for more information
All text above, and the splash screen must be included in any redistribution
*********************************************************************/
/* Uncomment this block to use hardware SPI
// If using software SPI (the default case):
#define OLED_MOSI D0
#define OLED_CLK D1
#define OLED_DC D2
#define OLED_CS D3
#define OLED_RESET D4
Adafruit_SSD1306 display(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
*/
// use hardware SPI
#define OLED_DC D3
#define OLED_CS D4
#define OLED_RESET D5
Adafruit_SSD1306 display(OLED_DC, OLED_RESET, OLED_CS);
#define NUMFLAKES 10
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
static const unsigned char logo16_glcd_bmp[] =
{ 0B00000000, 0B11000000,
0B00000001, 0B11000000,
0B00000001, 0B11000000,
0B00000011, 0B11100000,
0B11110011, 0B11100000,
0B11111110, 0B11111000,
0B01111110, 0B11111111,
0B00110011, 0B10011111,
0B00011111, 0B11111100,
0B00001101, 0B01110000,
0B00011011, 0B10100000,
0B00111111, 0B11100000,
0B00111111, 0B11110000,
0B01111100, 0B11110000,
0B01110000, 0B01110000,
0B00000000, 0B00110000 };
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
//Get Temperature data from cloud
void tempS(const char *temperature623, const char *dataS)
{
// display the temperature
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printlnf("Inside T: %s F", dataS, 3);
display.display();
display.clearDisplay(); // clears the screen and buffer
}
//Get Temperature data from cloud
void tempH(const char *temperatureh, const char *dataH)
{
// display the temperature
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printlnf("Outside T:%s F", dataH, 3);
display.display();
display.clearDisplay(); // clears the screen and buffer
}
void setup() {
Serial.begin(9600);
// by default, we'll generate the high voltage from the 3.3v line internally! (neat!)
display.begin(SSD1306_SWITCHCAPVCC);
// init done
display.display(); // show splashscreen
delay(100);
display.clearDisplay(); // clears the screen and buffer
// Subscribe to tempearture variable
Particle.subscribe("temperature623", tempS);
Particle.subscribe("temperatureh", tempH);
}
// This #include statement was automatically added by the Particle IDE.
#include <OneWire.h>
OneWire ds = OneWire(D4); // 1-wire signal on pin D4
unsigned long lastUpdate = 0;
float lastTemp;
void setup() {
Serial.begin(9600);
// Set up 'power' pins, comment out if not used!
pinMode(D3, OUTPUT);
pinMode(D5, OUTPUT);
digitalWrite(D3, LOW);
digitalWrite(D5, HIGH);
}
// up to here, it is the same as the address acanner
// we need a few more variables for this example
void loop(void) {
byte i;
byte present = 0;
byte type_s;
byte data[12];
byte addr[8];
float celsius, fahrenheit;
if ( !ds.search(addr)) {
Serial.println("No more addresses.");
Serial.println();
ds.reset_search();
delay(250);
return;
}
// The order is changed a bit in this example
// first the returned address is printed
Serial.print("ROM =");
for( i = 0; i < 8; i++) {
Serial.write(' ');
Serial.print(addr[i], HEX);
}
// second the CRC is checked, on fail,
// print error and just return to try again
if (OneWire::crc8(addr, 7) != addr[7]) {
Serial.println("CRC is not valid!");
return;
}
Serial.println();
// we have a good address at this point
// what kind of chip do we have?
// we will set a type_s value for known types or just return
// the first ROM byte indicates which chip
switch (addr[0]) {
case 0x10:
Serial.println(" Chip = DS1820/DS18S20");
type_s = 1;
break;
case 0x28:
Serial.println(" Chip = DS18B20");
type_s = 0;
break;
case 0x22:
Serial.println(" Chip = DS1822");
type_s = 0;
break;
case 0x26:
Serial.println(" Chip = DS2438");
type_s = 2;
break;
default:
Serial.println("Unknown device type.");
return;
}
// this device has temp so let's read it
ds.reset(); // first clear the 1-wire bus
ds.select(addr); // now select the device we just found
// ds.write(0x44, 1); // tell it to start a conversion, with parasite power on at the end
ds.write(0x44, 0); // or start conversion in powered mode (bus finishes low)
// just wait a second while the conversion takes place
// different chips have different conversion times, check the specs, 1 sec is worse case + 250ms
// you could also communicate with other devices if you like but you would need
// to already know their address to select them.
delay(1000); // maybe 750ms is enough, maybe not, wait 1 sec for conversion
// we might do a ds.depower() (parasite) here, but the reset will take care of it.
// first make sure current values are in the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xB8,0); // Recall Memory 0
ds.write(0x00,0); // Recall Memory 0
// now read the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xBE,0); // Read Scratchpad
if (type_s == 2) {
ds.write(0x00,0); // The DS2438 needs a page# to read
}
// transfer and print the values
Serial.print(" Data = ");
Serial.print(present, HEX);
Serial.print(" ");
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
Serial.print(data[i], HEX);
Serial.print(" ");
}
Serial.print(" CRC=");
Serial.print(OneWire::crc8(data, 8), HEX);
Serial.println();
// Convert the data to actual temperature
// because the result is a 16 bit signed integer, it should
// be stored to an "int16_t" type, which is always 16 bits
// even when compiled on a 32 bit processor.
int16_t raw = (data[1] << 8) | data[0];
if (type_s == 2) raw = (data[2] << 8) | data[1];
byte cfg = (data[4] & 0x60);
switch (type_s) {
case 1:
raw = raw << 3; // 9 bit resolution default
if (data[7] == 0x10) {
// "count remain" gives full 12 bit resolution
raw = (raw & 0xFFF0) + 12 - data[6];
}
celsius = (float)raw * 0.0625;
break;
case 0:
// at lower res, the low bits are undefined, so let's zero them
if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms
if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms
if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms
// default is 12 bit resolution, 750 ms conversion time
celsius = (float)raw * 0.0625;
break;
case 2:
data[1] = (data[1] >> 3) & 0x1f;
if (data[2] > 127) {
celsius = (float)data[2] - ((float)data[1] * .03125);
}else{
celsius = (float)data[2] + ((float)data[1] * .03125);
}
}
// remove random errors
if((((celsius <= 0 && celsius > -1) && lastTemp > 5)) || celsius > 125) {
celsius = lastTemp;
}
fahrenheit = celsius * 1.8 + 32.0;
lastTemp = celsius;
Serial.print(" Temperature = ");
Serial.print(celsius);
Serial.print(" Celsius, ");
Serial.print(fahrenheit);
Serial.println(" Fahrenheit");
// now that we have the readings, we can publish them to the cloud
//Particle.publish("Jtwoguysonecode", String(temperature));
//String temperature = String(fahrenheit); // store temp in "temperature" string
Particle.publish("temperature623", String(fahrenheit)); // publish to cloud
delay(300000); // 5 min delay
}
// This #include statement was automatically added by the Particle IDE.
#include <OneWire.h>
OneWire ds = OneWire(D4); // 1-wire signal on pin D4
unsigned long lastUpdate = 0;
float lastTemp;
void setup() {
Serial.begin(9600);
// Set up 'power' pins, comment out if not used!
pinMode(D3, OUTPUT);
pinMode(D5, OUTPUT);
digitalWrite(D3, LOW);
digitalWrite(D5, HIGH);
}
// up to here, it is the same as the address acanner
// we need a few more variables for this example
void loop(void) {
byte i;
byte present = 0;
byte type_s;
byte data[12];
byte addr[8];
float celsius, fahrenheit;
if ( !ds.search(addr)) {
Serial.println("No more addresses.");
Serial.println();
ds.reset_search();
delay(250);
return;
}
// The order is changed a bit in this example
// first the returned address is printed
Serial.print("ROM =");
for( i = 0; i < 8; i++) {
Serial.write(' ');
Serial.print(addr[i], HEX);
}
// second the CRC is checked, on fail,
// print error and just return to try again
if (OneWire::crc8(addr, 7) != addr[7]) {
Serial.println("CRC is not valid!");
return;
}
Serial.println();
// we have a good address at this point
// what kind of chip do we have?
// we will set a type_s value for known types or just return
// the first ROM byte indicates which chip
switch (addr[0]) {
case 0x10:
Serial.println(" Chip = DS1820/DS18S20");
type_s = 1;
break;
case 0x28:
Serial.println(" Chip = DS18B20");
type_s = 0;
break;
case 0x22:
Serial.println(" Chip = DS1822");
type_s = 0;
break;
case 0x26:
Serial.println(" Chip = DS2438");
type_s = 2;
break;
default:
Serial.println("Unknown device type.");
return;
}
// this device has temp so let's read it
ds.reset(); // first clear the 1-wire bus
ds.select(addr); // now select the device we just found
// ds.write(0x44, 1); // tell it to start a conversion, with parasite power on at the end
ds.write(0x44, 0); // or start conversion in powered mode (bus finishes low)
// just wait a second while the conversion takes place
// different chips have different conversion times, check the specs, 1 sec is worse case + 250ms
// you could also communicate with other devices if you like but you would need
// to already know their address to select them.
delay(1000); // maybe 750ms is enough, maybe not, wait 1 sec for conversion
// we might do a ds.depower() (parasite) here, but the reset will take care of it.
// first make sure current values are in the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xB8,0); // Recall Memory 0
ds.write(0x00,0); // Recall Memory 0
// now read the scratch pad
present = ds.reset();
ds.select(addr);
ds.write(0xBE,0); // Read Scratchpad
if (type_s == 2) {
ds.write(0x00,0); // The DS2438 needs a page# to read
}
// transfer and print the values
Serial.print(" Data = ");
Serial.print(present, HEX);
Serial.print(" ");
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
Serial.print(data[i], HEX);
Serial.print(" ");
}
Serial.print(" CRC=");
Serial.print(OneWire::crc8(data, 8), HEX);
Serial.println();
// Convert the data to actual temperature
// because the result is a 16 bit signed integer, it should
// be stored to an "int16_t" type, which is always 16 bits
// even when compiled on a 32 bit processor.
int16_t raw = (data[1] << 8) | data[0];
if (type_s == 2) raw = (data[2] << 8) | data[1];
byte cfg = (data[4] & 0x60);
switch (type_s) {
case 1:
raw = raw << 3; // 9 bit resolution default
if (data[7] == 0x10) {
// "count remain" gives full 12 bit resolution
raw = (raw & 0xFFF0) + 12 - data[6];
}
celsius = (float)raw * 0.0625;
break;
case 0:
// at lower res, the low bits are undefined, so let's zero them
if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms
if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms
if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms
// default is 12 bit resolution, 750 ms conversion time
celsius = (float)raw * 0.0625;
break;
case 2:
data[1] = (data[1] >> 3) & 0x1f;
if (data[2] > 127) {
celsius = (float)data[2] - ((float)data[1] * .03125);
}else{
celsius = (float)data[2] + ((float)data[1] * .03125);
}
}
// remove random errors
if((((celsius <= 0 && celsius > -1) && lastTemp > 5)) || celsius > 125) {
celsius = lastTemp;
}
fahrenheit = celsius * 1.8 + 32.0;
lastTemp = celsius;
Serial.print(" Temperature = ");
Serial.print(celsius);
Serial.print(" Celsius, ");
Serial.print(fahrenheit);
Serial.println(" Fahrenheit");
// now that we have the readings, we can publish them to the cloud
String temperature = String(fahrenheit); // store temp in "temperature" string
Particle.publish("temperatureh", temperature); // publish to cloud
delay(300000); // 5 min delay
}



Comments