
Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
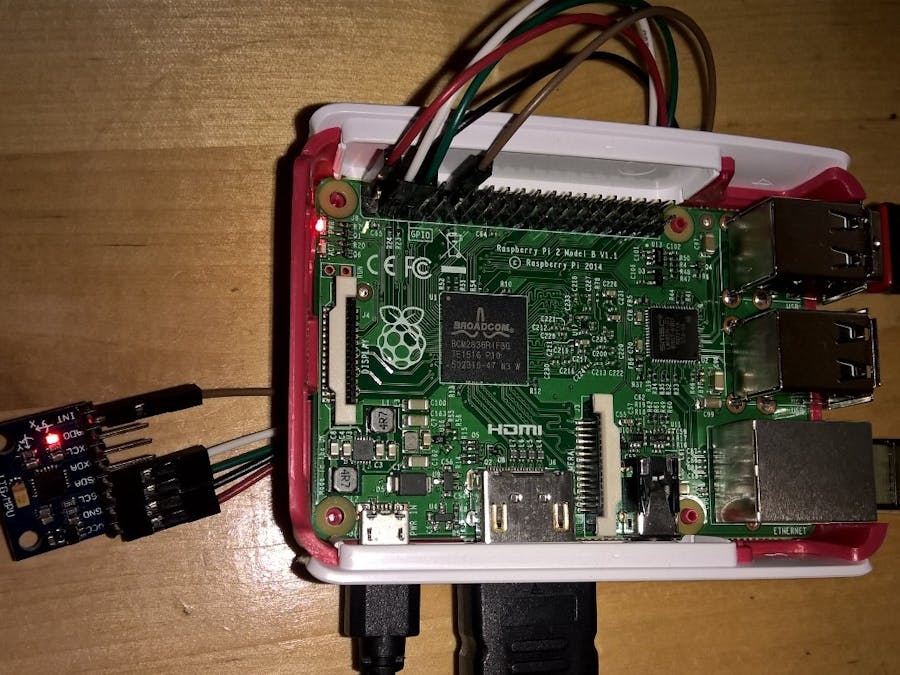
There are quite a few samples out there for integrating the MPU 6050 to Arduino. Unfortunately Jeff Rowberg's one is in C and is not really suitable for Windows IoT. I though I might write one from scratch that does not use the DMP.
I don't think the DMP is necessary for four reasons:
- The pi has enough power to do its own sensor fusion.
- It is likely you would want to sensor fuse other inputs like wheel speed.
- The code is reduced quite at bit and therefore really easy to change.
- By using the fifo and the interrupt you can be assured a constant sample rate.
If you want to modify the code, have a look at the various documentation: http://store.invensense.com/ProductDetail/MPU6050-InvenSense-Inc/422200/
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using Windows.Devices.Enumeration;
using Windows.Devices.I2c;
using Windows.Devices.Gpio;
namespace Mpu6050
{
public class MpuSensorValue
{
public float AccelerationX { get; set; }
public float AccelerationY { get; set; }
public float AccelerationZ { get; set; }
public float GyroX { get; set; }
public float GyroY { get; set; }
public float GyroZ { get; set; }
}
public class MpuSensorEventArgs : EventArgs
{
public byte Status { get; set; }
public float SamplePeriod { get; set; }
public MpuSensorValue [] Values { get; set; }
}
public partial class MPU6050 : IDisposable
{
public event EventHandler<MpuSensorEventArgs> SensorInterruptEvent;
#region Constants
public const byte ADDRESS = 0x68;
private const byte PWR_MGMT_1 = 0x6B;
private const byte SMPLRT_DIV = 0x19;
private const byte CONFIG = 0x1A;
private const byte GYRO_CONFIG = 0x1B;
private const byte ACCEL_CONFIG = 0x1C;
private const byte FIFO_EN = 0x23;
private const byte INT_ENABLE = 0x38;
private const byte INT_STATUS = 0x3A;
private const byte USER_CTRL = 0x6A;
private const byte FIFO_COUNT = 0x72;
private const byte FIFO_R_W = 0x74;
private const int SensorBytes = 12;
#endregion
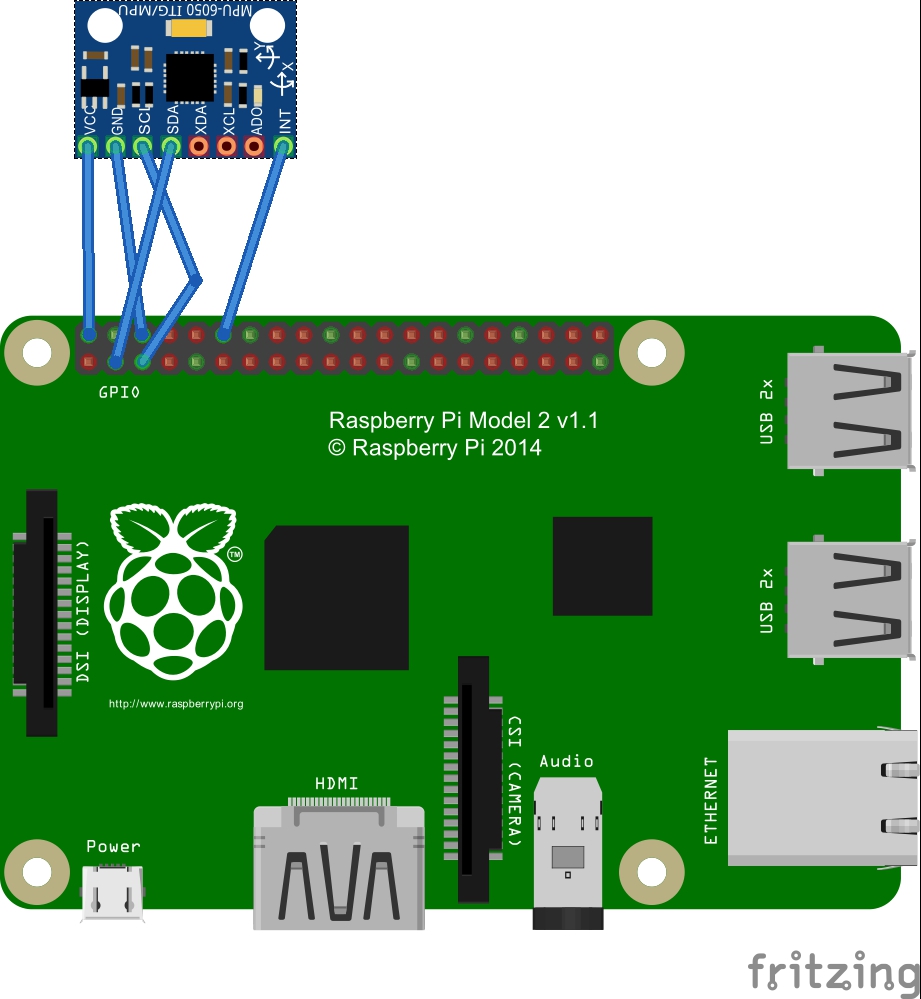
private const Int32 INTERRUPT_PIN = 18;
I2cDevice _mpu6050Device = null;
private GpioController IoController;
private GpioPin InterruptPin;
#region 12c
private byte ReadByte(byte regAddr)
{
byte[] buffer = new byte[1];
buffer[0] = regAddr;
byte[] value = new byte[1];
_mpu6050Device.WriteRead(buffer, value);
return value[0];
}
private byte[] ReadBytes(byte regAddr, int length)
{
byte[] values = new byte[length];
byte[] buffer = new byte[1];
buffer[0] = regAddr;
_mpu6050Device.WriteRead(buffer, values);
return values;
}
public ushort ReadWord(byte address)
{
byte[] buffer = ReadBytes(FIFO_COUNT, 2);
return (ushort)(((int)buffer[0] << 8) | (int)buffer[1]);
}
void WriteByte(byte regAddr, byte data)
{
byte[] buffer = new byte[2];
buffer[0] = regAddr;
buffer[1] = data;
_mpu6050Device.Write(buffer);
}
void writeBytes(byte regAddr, byte[] values)
{
byte[] buffer = new byte[1 + values.Length];
buffer[0] = regAddr;
Array.Copy(values, 0, buffer, 1, values.Length);
_mpu6050Device.Write(buffer);
}
#endregion
public async void InitHardware()
{
try
{
IoController = GpioController.GetDefault();
InterruptPin = IoController.OpenPin(INTERRUPT_PIN);
InterruptPin.Write(GpioPinValue.Low);
InterruptPin.SetDriveMode(GpioPinDriveMode.Input);
InterruptPin.ValueChanged += Interrupt;
string aqs = I2cDevice.GetDeviceSelector();
DeviceInformationCollection collection = await DeviceInformation.FindAllAsync(aqs);
I2cConnectionSettings settings = new I2cConnectionSettings(ADDRESS);
settings.BusSpeed = I2cBusSpeed.FastMode; // 400kHz clock
settings.SharingMode = I2cSharingMode.Exclusive;
_mpu6050Device = await I2cDevice.FromIdAsync(collection[0].Id, settings);
await Task.Delay(3); // wait power up sequence
WriteByte(PWR_MGMT_1, 0x80);// reset the device
await Task.Delay(100);
WriteByte(PWR_MGMT_1, 0x2);
WriteByte(USER_CTRL, 0x04); //reset fifo
WriteByte(PWR_MGMT_1, 1); // clock source = gyro x
WriteByte(GYRO_CONFIG, 0); // +/- 250 degrees sec
WriteByte(ACCEL_CONFIG, 0); // +/- 2g
WriteByte(CONFIG, 1); // 184 Hz, 2ms delay
WriteByte(SMPLRT_DIV, 19); // set rate 50Hz
WriteByte(FIFO_EN, 0x78); // enable accel and gyro to read into fifo
WriteByte(USER_CTRL, 0x40); // reset and enable fifo
WriteByte(INT_ENABLE, 0x1);
}
catch (Exception ex)
{
string error = ex.ToString();
}
}
private void Interrupt(GpioPin sender, GpioPinValueChangedEventArgs args)
{
if (_mpu6050Device != null)
{
int interrupt_status = ReadByte(INT_STATUS);
if ((interrupt_status & 0x10) != 0)
{
WriteByte(USER_CTRL, 0x44); // reset and enable fifo
}
if ((interrupt_status & 0x1) != 0)
{
MpuSensorEventArgs ea = new MpuSensorEventArgs();
ea.Status = (byte)interrupt_status;
ea.SamplePeriod = 0.02f;
List<MpuSensorValue> l = new List<MpuSensorValue>();
int count = ReadWord(FIFO_COUNT);
while (count >= SensorBytes)
{
byte[] data = ReadBytes(FIFO_R_W, (byte)SensorBytes);
count -= SensorBytes;
short xa = (short)((int)data[0] << 8 | (int)data[1]);
short ya = (short)((int)data[2] << 8 | (int)data[3]);
short za = (short)((int)data[4] << 8 | (int)data[5]);
short xg = (short)((int)data[6] << 8 | (int)data[7]);
short yg = (short)((int)data[8] << 8 | (int)data[9]);
short zg = (short)((int)data[10] << 8 | (int)data[11]);
MpuSensorValue sv = new MpuSensorValue();
sv.AccelerationX = (float)xa / (float)16384;
sv.AccelerationY = (float)ya / (float)16384;
sv.AccelerationZ = (float)za / (float)16384;
sv.GyroX = (float)xg / (float)131;
sv.GyroY = (float)yg / (float)131;
sv.GyroZ = (float)zg / (float)131;
l.Add(sv);
}
ea.Values = l.ToArray();
if (SensorInterruptEvent != null)
{
if (ea.Values.Length > 0)
{
SensorInterruptEvent(this, ea);
}
}
}
}
}
#region IDisposable Support
private bool disposedValue = false; // To detect redundant calls
protected virtual void Dispose(bool disposing)
{
if (!disposedValue)
{
InterruptPin.Dispose();
if (_mpu6050Device != null)
{
_mpu6050Device.Dispose();
_mpu6050Device = null;
}
disposedValue = true;
}
}
~MPU6050()
{
// Do not change this code. Put cleanup code in Dispose(bool disposing) above.
Dispose(false);
}
// This code added to correctly implement the disposable pattern.
public void Dispose()
{
// Do not change this code. Put cleanup code in Dispose(bool disposing) above.
Dispose(true);
GC.SuppressFinalize(this);
}
#endregion
}
}
using System;
using System.Collections.Generic;
using System.IO;
using System.Linq;
using System.Runtime.InteropServices.WindowsRuntime;
using Windows.Foundation;
using Windows.Foundation.Collections;
using Windows.UI.Core;
using Windows.UI.Xaml;
using Windows.UI.Xaml.Controls;
using Windows.UI.Xaml.Controls.Primitives;
using Windows.UI.Xaml.Data;
using Windows.UI.Xaml.Input;
using Windows.UI.Xaml.Media;
using Windows.UI.Xaml.Navigation;
// The Blank Page item template is documented at http://go.microsoft.com/fwlink/?LinkId=402352&clcid=0x409
namespace Mpu6050
{
/// <summary>
/// An empty page that can be used on its own or navigated to within a Frame.
/// </summary>
public sealed partial class MainPage : Page
{
MPU6050 _mpu6050 = new MPU6050();
int _interruptCount = 0;
DateTime _startTime;
public MainPage()
{
this.InitializeComponent();
_mpu6050.InitHardware();
_mpu6050.SensorInterruptEvent += _mpu6050_SensorInterruptEvent;
_startTime = DateTime.Now;
}
private void _mpu6050_SensorInterruptEvent(object sender, MpuSensorEventArgs e)
{
var task = Dispatcher.RunAsync(CoreDispatcherPriority.Normal, () =>
{
_interruptCount += e.Values.Length;
float samples_per_second = (float)_interruptCount / (float)((DateTime.Now - _startTime).Seconds);
textBoxStatus.Text = String.Format("{0} {1} {2}", e.Status, e.SamplePeriod, samples_per_second);
textBoxAccel.Text = String.Format("{0}, {1}, {2}", e.Values[0].AccelerationX, e.Values[0].AccelerationY, e.Values[0].AccelerationZ);
textBoxGyro.Text = String.Format("{0}, {1}, {2}", e.Values[0].GyroX, e.Values[0].GyroY, e.Values[0].GyroZ);
});
}
private void button_Click(object sender, RoutedEventArgs e)
{
_mpu6050.Dispose();
Application.Current.Exit();
}
}
}
14 projects • 82 followers
I'm a software developer on a long sabbatical. I've had wide experience from banking to underwater military sonar systems.




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments