


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Generally, many don’t follow the rules in a traffic light intersection and that is a major conflict of accidents. Many of us won’t stop the vehicle before the stop line during the red signal and we will stop the vehicle after the pedestrian which lies after stop line. That causes the pedestrians to cross the roads in mid of the lane and that’s a big conflict for accidents.
So I thought of establishing an invisible ultra sound screen at the stop line post. The CCTV cameras exist on every signal zones and i'm making use of it.
At the time of red signal, if any vehicle crosses the ultra sound screen, automatically the CCTV will focus the number plate of the vehicle and captures the number and processes the image via arduino and sends the number to the cloud. The cloud is like a reference index, where it searches the vehicle registrar index for the details of the vehicle owner. Once it fetches the details, it immediately add a violation record on that vehicle owner's profile and a sms will be sent to vehicle owner regarding penalty as initial enforcement.
If the same vehicle kept on violating, the number of records will be increased and the cloud will analyse these records and shows to the dashboard as priority which will be monitoring by Traffic police authorities of the city and rest enforcement they take care.
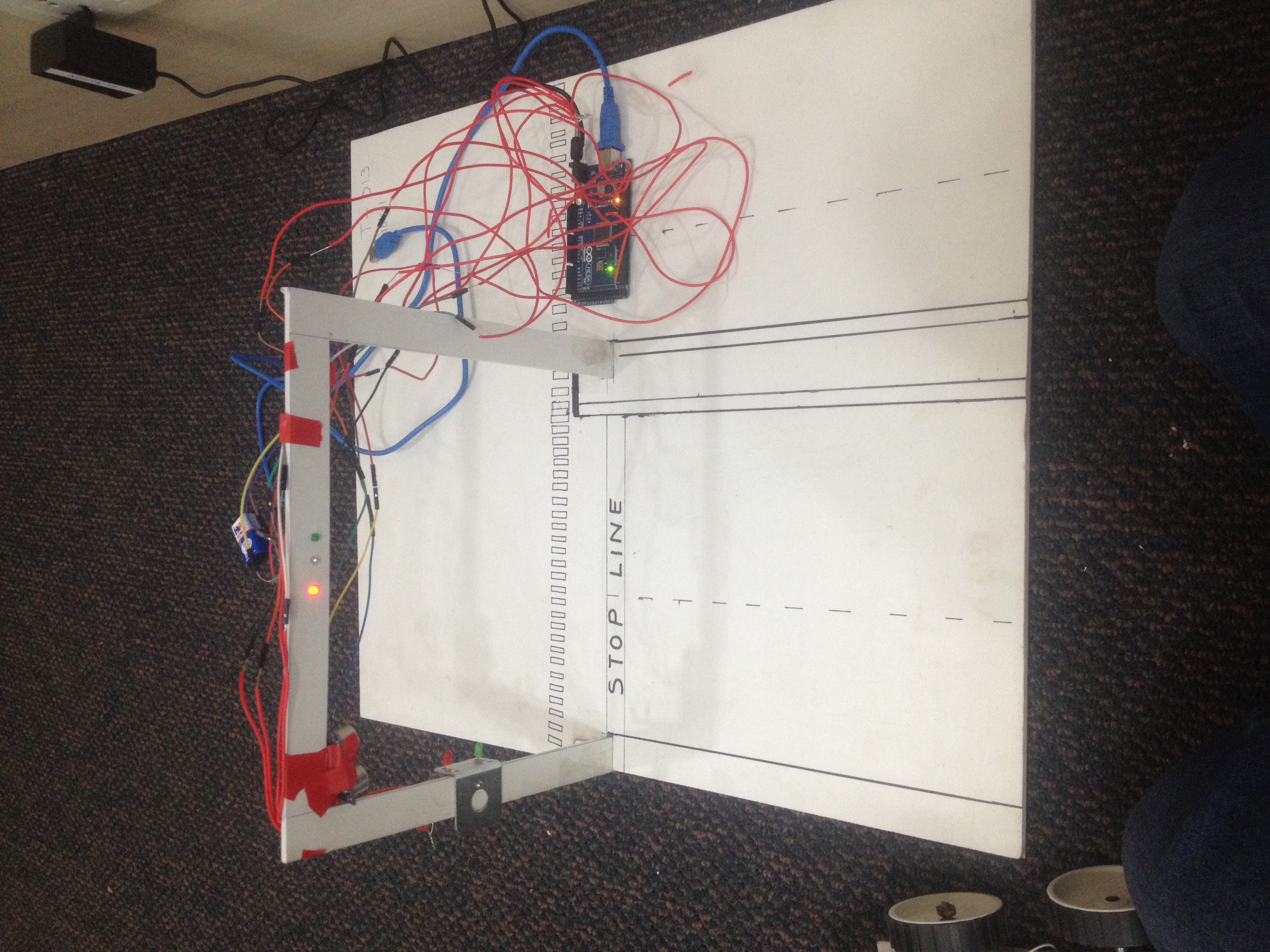
Model of signal post









{kind=link}
{kind=link}
Comments