import serial
import RPi.GPIO as GPIO
ser = serial.Serial('/dev/ttyUSB0')
ser.flushInput
GPIO.setwarnings(False)
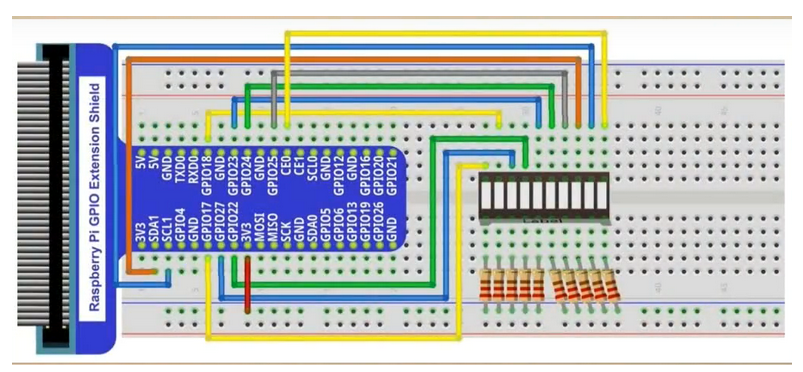
ledPins = [11, 12, 13, 15, 16, 18, 19, 21, 22, 23]
def setup():
print("Program is starting")
GPIO.setmode(GPIO.BOARD) #physical location
for pin in ledPins:
GPIO.setup(pin, GPIO.OUT) #mode output
GPIO.output(pin, GPIO.HIGH) #off led
def destroy():
for pin in ledPins:
GPIO.output(pin, GPIO.HIGH)
GPIO.cleanup()
if __name__ == '__main__':
dict = {"5":"9", "10":"8", "15":"7", "20":"6", "25":"5", "30":"4", "35":"3", "40":"2", "50":"1", "60":"0" }
dict = {int(k):int(i) for k, i in dict.items()}
list = dict.keys()
list.sort()
numarLeduri = 0
flag = 0
setup()
try:
while True:
ser_bytes = ser.readline()
decoded_bytes = float(ser_bytes[0:len(ser_bytes)-2].decode("utf-8"))
dist = decoded_bytes
##
lungime = len(list)
for i in range(lungime - 1):
if dist >= list[i] and dist < list[i+1]:
numarLeduri = dict[list[i]]
continue
if dist >= 60:
numarLeduri = 0
for pin in ledPins[:numarLeduri]:
GPIO.output(pin, GPIO.LOW)
for pin in ledPins[numarLeduri+1:]:
GPIO.output(pin, GPIO.HIGH)
##
if dist<=10:
flag = flag + 1
if flag == 6:
import smtplib
server=smtplib.SMTP('smtp.gmail.com',587)
server.starttls()
server.login("gmail","pass")
msg="Alerta senzor, distana este " + str(dist)
server.sendmail("emiraspberrypi0@gmail.com",
"nailimebale@yahoo.com",msg)
server.quit()
##
print("distanta este {}, iar noi ar trebui sa aprindem primele {} becuri".format(dist, numarLeduri))
except KeyboardInterrupt:
#destroy()
print("exit")



















{kind=link}
{kind=link}
Comments