Pixy recently came out with their next version of their Pixy Camera, which can recognize objects and track them. DFRobot sent me one, so I decided to create a robot that can grab an item and then bring it back.
Robot PlatformI used a MiniQ robot chassis from DFRobot as the platform that the robot would be built upon. It comes with multiple mounting holes, so I designed a battery riser using Fusion 360 that attaches to a set of holes. Then I mounted the gripper to the front.
Pixy Camera SetupThe makers of the Pixy Camera provide a software called PixyMon, which shows what the camera "sees" and lets users adjust parameters, set interfaces, and create color codes. I downloaded and installed PixyMon from their website here. Then I connected the Pixy2 to my PC via USB and went to the File menu and selected Configure.
First, I set the interface to I2C, as I will be using a non-Arduino board.
Next, I tuned some miscellaneous settings in the expert menu, as seen in the image.
Finally, I got out the block I wanted to use and clicked "Set signature 1" under the Action menu. This sets what the Pixy looks for.
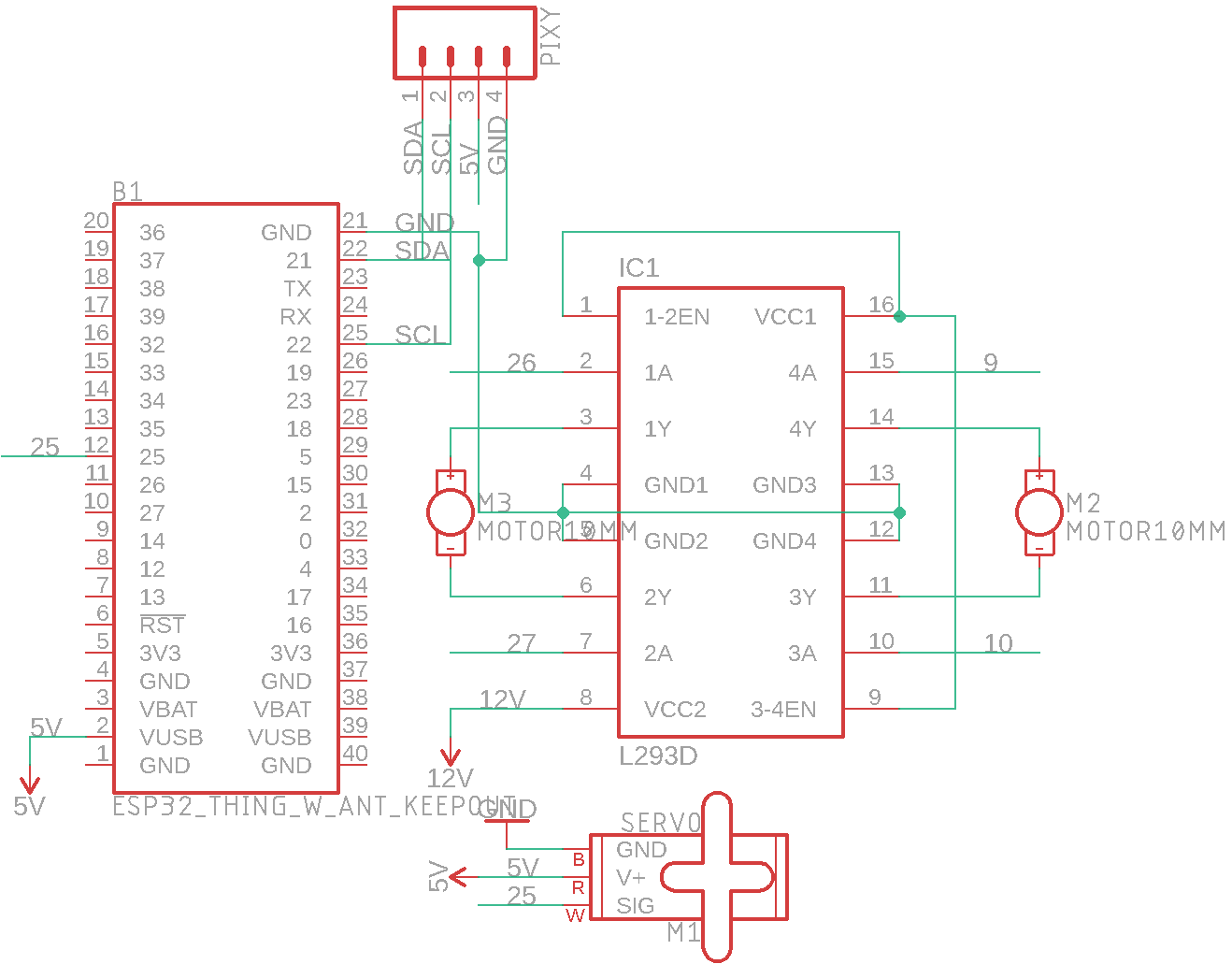
WiringSince I setup the Pixy to use the I2C mode, only 4 wires are needed to connect it to the ESP32 FireBeetle. Just connect SDA, SCL, 5V, and GND.
Then I wired up the L293D dual H-bridge DC motor driver to pins IO26, IO27, IO9, and IO10, along with power and output, as seen in this image.
Creating the ProgramThe program "flow" goes as follows:
- Find target block
- Get width and position
- Adjust robot position based on where the block is
- Move forward until it gets close enough
- Grab object
- Reverse backwards
- Release object
Using the RobotI first put up a piece of white paper for the background to prevent other objects from being accidentally detected. Then, I reset the ESP32 and watched it drive towards the object, grab it, and then return it, as seen in the video.











{kind=link}
Comments